1.本发明属于医疗光电监测技术领域,具体涉及人脑动态仿体装置和近红外光学仪器精确度标定方法。
背景技术:
2.不同的有机物含有不同的基团,不同的基团有不同的能级,不同的基团和同一基团在不同物理化学环境中对近红外光的吸收波长都有明显差别,且吸收系数小,发热少,因此近红外光谱可作为获取信息的一种有效的载体。近红外光照射时,频率相同的光线和基团将发生共振现象,光的能量通过分子偶极矩的变化传递给分子;而近红外光的频率和样品的振动频率不相同,该频率的红外光就不会被吸收。因此,利用600
‑
900nm波长的近红外光源照射颅骨,根据脑组织中主要生色团物质(氧合血红蛋白、脱氧血红蛋白和细胞色素氧化酶)对近红外光谱吸收的差异,通过测量经过脑组织漫射后的出射光强度,获取脑组织对于光的吸收作用信息,再采用相关算法,可以得出脑血氧饱和度。
3.随着近红外光谱检测技术的发展,一个问题也逐渐显露。即从研究机构到企业,缺乏行业公认的有效检验标准。只有经过公认的检验后,其产品的功能效用才更加客观且更具说服力。目前常见的检验方法为物理模拟或动物实验。一个行业检验标准,应具备完备的物理模拟观测量检测,因此其优先级更高。物理模拟是提取目标检测量的相关特征后,通过物理装置模拟实现其特征精确量化的方法。其相较于动物实验的优点有:可标准化生产、重复使用、参数可控、工作环境稳定可控;另外,批量化生产可降低生产成本,从而降低检测费用降低医疗成本。
4.因此当前需要一种模拟人脑生色团活动的物理装置来标定现有近红外光学检测装置的可靠性和精确度,作为行业的检验标准。
技术实现要素:
5.本发明要解决的技术问题是:提供人脑动态仿体装置和近红外光学仪器精确度标定方法,用于标定近红外光学检测装置的精确度。
6.本发明为解决上述技术问题所采取的技术方案为:人脑动态仿体装置,包括脑组织物理环境模拟模块、生色团模拟模块、运动控制模块、人机交互模块;脑组织物理环境模拟模块设有仪器接口用于连接待标定仪器,内部充满浓度为1%的脂肪乳剂intralipid溶液用于模拟人的脑组织物理环境;生色团模拟模块装配在脑组织物理环境模拟模块中通过颜色的深浅变化模拟生色团在光的模态下的浓度变化,用于动态模拟人脑各个区域的生色团在进行脑部活动时对光辐射产生的包括吸收、散射的生物学性能;人机交互模块的信号输出端连接运动控制模块的信号输入端,用于根据预输入的脑功能活动模式向运动控制模块发送控制指令;人机交互模块的信号输入端连接待标定仪器的信号输出端,用于接收、处理、显示待标定仪器的测试数据和标定结果;运动控制模块的动作输出端连接生色团模拟模块,用于驱动生色团模拟模块进行模拟脑部活动的动作;生色团模拟模块包括至少一个
活动的、具有色值差异的色棒;色棒是由透光材料制成的长杆,长杆表面自顶部向下依次分布若干环状的色带,色带的颜色自上而下通过调整rgb值变深或变浅。
7.按上述方案,同一根色棒的色带采用线性变化的色谱,色带的颜色变化程度一致、色带的宽度一致;色棒以精度高低分类,包括高精度色棒和低精度色棒;高精度色棒的色带的宽度小于10mm;低精度色棒的色带的宽度大于等于10mm且小于30mm;待标定仪器的传感器的尺寸和检测精度越高则单个色带的宽度越小,待标定仪器的测量范围越大则同一根色棒上的色谱的跨度越大;色棒的颜色、深浅根据待标定仪器的目标观测量选择;若目标观测量为血氧饱和度,则选择红色的色棒;若模拟的是人脑表层活动少,深层活动多,则选择变深的色棒;若模拟的是人脑表层活动多,深层活动少,则选择变浅的色棒;色棒的形状为由平面闭合图形法向拉伸得到的实体形状,包括圆柱、长方体、三棱柱;色带的表面采用磨砂工艺或涂抹哑光漆使色带表面粗糙,用于增强色带的散射能力从而模拟生色团对光的吸收和反射;透光材料包括但不限于pmma、pe、fep。
8.按上述方案,脑组织物理环境模拟模块包括顶箱,顶箱是由遮光材料制成的封闭容器;遮光材料的透光率低于1%且不易与intralipid溶液反应,包括但不限于黑色abs、ppo、及pom;顶箱的表面喷涂黑漆用于吸收透过遮光材料的光线;顶箱的顶面设有仪器接口,仪器接口的选用包括pmma的透光材料;顶箱的内部设有与顶箱的顶面垂直的空心通道用于供色棒进行往复运动;空心通道的截面形状与色棒的截面形状相匹配;顶箱的上下表面的使用面积不小于人脑面积,设置为390*390mm2;设置单个空心通道的截面积小于顶箱的高度大于30mm,且使色棒的长度比顶箱的高度长一定距离,用于保证色棒的预设长度伸入顶箱;空心通道之间相互平行;每行空心通道之间紧密排列,相邻两行空心通道之间交错紧密排列。
9.按上述方案,人机交互模块包括显示单元、数据处理单元和开关;数据处理单元包括通信模块和处理器;通信模块用于与上位机或远程平台传输数据;处理器用于比对待标定仪器的测试数据和预输入的脑功能活动模式得到被测仪器的精确度,或比对待标定仪器的传感器的检测数据和预输入的脑功能活动模式得到传感器标定数据;显示单元用于输入指令、查阅命令、显示数据和结果;开关用于启动和停止人脑动态仿体装置的运行。
10.按上述方案,还包括安装框架;安装框架包括底座和固定支架;底座的四角设有第二支柱,固定支架的底面设有第二定位凹槽,第二支柱装配在第二定位凹槽中,底座与固定支架通过第二支柱和第二定位凹槽定位并可拆卸式连接;固定支架的顶部设有第一支柱,顶箱的底部的设有第一定位凹槽,第一支柱装配在第一定位凹槽中,固定支架与顶箱通过第二支柱和第二定位凹槽定位并可拆卸式连接;人机交互模块设置在底座的内部;底座的顶面设有电机凹槽。
11.进一步的,运动控制模块包括运动单元和控制单元;运动单元包括升降机构;升降机构用于驱动色棒做上下往复运动,升降机构包括轴承支架、丝杆、导轨、滑块、电机;导轨固定在轴承支架之间;丝杆与导轨平行、以中心轴为旋转轴、通过轴承连接在轴承支架之间;电机装配在电机凹槽中,轴承支架分别可拆卸式连接固定在底座的顶面和固定支架的底面;滑块设有两个孔,分别套装在丝杆与导轨上,套装丝杆的孔为与丝杆配合的螺纹孔,套装导轨的孔为通孔;滑块还设有a装配孔,a装配孔用于固定色棒的底部;电机设置在连接
丝杆的轴承底部,用于驱动丝杆转动使滑块做上下直线运动;电机选用伺服电机;控制单元的控制端连接电机的受控端,用于将收到的数据转换为指令并发送给电机。
12.进一步的,为模仿表层血氧活动少、深层血氧活动多包括氧合血红蛋白和脱氧血红蛋白生色团的人脑环境,设色棒的直径为5mm,长度为120mm;顶箱的高度为100mm;设色棒的单个色带宽为5mm、色带总宽为30mm;设色棒a的色带自上而下变深,色带色值范围依次为rgb(255,120,120)~rgb(255,100,100)、rgb(255,100,100)~rgb(255,80,80)、rgb(255,80,80)~rgb(255,60,60)、rgb(255,60,60)~rgb(255,40,40)、rgb(255,40,40)~rgb(255,20,20)、rgb(255,20,20)~rgb(255,0,0),各个色带内部设计线性变化的色值,用于模拟氧合血红蛋白生色团;设色棒b的色带自上而下变深,色带色值范围依次为rgb(255,120,255)~rgb(255,100,255)、rgb(255,100,255)~rgb(255,80,255)、rgb(255,80,255)~rgb(255,60,255)、rgb(255,60,255)~rgb(255,40,255)、rgb(255,40,255)~rgb(255,20,255)、rgb(255,20,255)~rgb(255,0,255)的色棒5,各个色带内部设计线性变化的色值,用于模拟脱氧血红蛋白生色团。
13.近红外光学仪器精确度标定方法,包括以下步骤:
14.s1:安装人脑动态仿体装置,包括脑组织物理环境模拟模块、生色团模拟模块、运动控制模块、人机交互模块;脑组织物理环境模拟模块设有仪器接口,内部充满浓度为1%的脂肪乳剂intralipid溶液;生色团模拟模块装配在脑组织物理环境模拟模块中;人机交互模块的信号输出端连接运动控制模块的信号输入端;人机交互模块的信号输入端连接待标定仪器的信号输出端;运动控制模块的动作输出端连接生色团模拟模块;生色团模拟模块包括至少一个活动的、具有色值差异的色棒;色棒是由透光材料制成的长杆,长杆表面自顶部向下依次分布若干环状的色带;根据检测目的和目标观测量选择色棒安装;
15.s2:将待标定仪器接入仪器接口;将对应的脑功能活动模式输入向人机交互模块;
16.s3:人机交互模块处理数据模板并发送给运动控制模块;
17.s4:运动控制模块接收数据、转换为指令并执行指令,驱动色棒在脑组织物理环境模拟模块中进行往复运动形成不同的色棒组合,完成对生色团的模拟;
18.s5:待标定仪器采集数据并发送给人机交互模块;
19.s6:人机交互模块接收采集数据并与步骤s2的脑功能活动模式比对,得到待标定仪器的精确度报告。
20.进一步的,所述的步骤s1中,具体步骤为:
21.s11:根据检测目的和目标观测量选择色棒;
22.s12:将色棒安装到运动控制模块的升降机构上,形成完整的运动单元;
23.s13:将运动单元依次安装到底座和固定支架之间,使色棒穿过固定支架;固定底座和固定支架;
24.s14:将色棒从底部插入顶箱,固定顶箱和固定支架;
25.s15:连接运动控制模块和人机交互模块。
26.进一步的,将步骤s5和s6替换为以下步骤:
27.待标定仪器的传感器采集数据并发送给人机交互模块;
28.人机交互模块接收采集数据并与步骤s2的脑功能活动模式比对,得到可靠性报告。
29.本发明的有益效果为:
30.1.本发明的人脑动态仿体装置和近红外光学仪器精确度标定方法,通过模拟近红外光学仪器的测试环境,精确量化特征,实现了标定近红外光学检测装置的精确度的功能,解决了近红外光学检测行业缺乏检验标准的问题,为近红外光学检测提供了有效检验标准,为近红外光谱标准化行业发展奠定了基础。
31.2.本发明相较于动物实验,具有标准化生产、重复使用、参数可控、工作环境稳定可控的优点。
32.3.本发明降低了生产成本,降低了检测费用和医疗成本。
附图说明
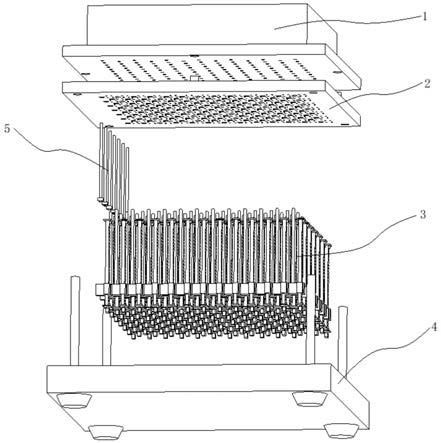
33.图1是本发明实施例的装配爆炸图。
34.图2是本发明实施例的顶箱的立体图。
35.图3是本发明实施例的顶箱的剖面图。
36.图4是本发明实施例的色棒的主视图。
37.图5是本发明实施例的升降模块的立体图。
38.图6是本发明实施例的色棒与升降模块的装配图。
39.图7是本发明实施例的流程图。
40.图中:1.顶箱;2.固定支架;3.升降机构;4.底座;5.色棒;6.轴承支架;7.丝杆;8.导轨;9.滑块;10.步进电机;a.装配孔。
具体实施方式
41.下面结合附图和具体实施方式对本发明作进一步详细的说明。
42.参见图1,本发明的实施例包括装置主体、脑组织物理环境模拟模块、生色团模拟模块、人机交互模块、运动与控制模块。
43.装置主体包括底座4和固定支架2,底座4设置有安装运动单元的凹槽,运动单元通过螺丝固定在底座4,底座4设置有支撑柱,固定支架2设置装配支柱的凹槽,底座4与固定支架2通过支柱和凹槽定位后用螺丝连接,底座4四角的支柱与固定支架2的底部凹槽定位装配后形成装置整体架构。固定支架2设置支柱,脑组织物理环境模拟模块设置装配支柱的凹槽,固定支架2与脑组织物理环境模拟模块通过螺丝连接紧固。
44.脑组织物理环境模拟模块包括顶箱1,顶箱1通过螺丝安装在固定架的上部。如图2所示,顶箱1由遮光材料制成的封闭容器,遮光材料具有硬度高、耐腐蚀性强、透光率低于1%、耐磨性好、化学性质稳定、不易与intralipid溶液反应等性质,包括但不限于如黑色abs、ppo、及pom等材质;为保证其透光率低于1%,还可在容器外表面喷涂黑漆,吸收透过材料的光线。顶箱1的上盖设有对外接口,可接入相关检测设备的探头及光源,接口处材质应利于近红外光等光线透过,选用聚甲基丙烯酸甲酯pmma材质。
45.如图3所示,顶箱1的内部设有空心圆柱通道作为色棒5做往复运动的通道。顶箱1的内部装满浓度为1%的脂肪乳剂intralipid溶液,用于模拟人脑组织物理环境。由于人头围目前已知最大值为680mm,以求得人脑面积,作为顶箱1上下表面的使用面积,具体设置为390*390mm2。参考近红外检测的源探最佳距离为30mm,由此设置圆柱空心通道单个所占面
积为目前近红外探测人脑最深距离为30mm左右,为保证其活动能被完整检测以及技术的进步带来检测深度的革新,顶箱1高度应高于30mm,本实施例顶箱1的高度定为100mm。脑组织物理环境模拟模块的圆柱空心通道形状不限于圆柱,菱形、三角形、六边形等闭合形状也适用。圆柱空心通道共计618个,第一行有13个圆柱空心通道,第二行从第一行前两个圆柱空心通道的中间位置起往后排列有12个,每行的圆柱空心通道之间零间隙排列,相邻两行之间零间隙排列,两种排列方式交错阵列,共13行。相邻两行之间错开排列是为了建立更多的检测通道,相比于每行都排列一致,错开15mm排列对同一个色棒5的检测通道至少多两个通道。脑组织物理环境模拟模块对外接口底部以及圆柱空心通道为透明材质制成。该材质应具有透光率高,低雾度,耐候性好,可透过近红外线等性质,包括但不限于pe、fep、pmma等材质。
46.生色团模拟模块包括至少一个可调整的、具有色值差异的、不同颜色组合的色棒5,用于模拟人脑各个区域的生色团在进行脑部活动时对光辐射产生吸收、散射的生物学性能,实现对人脑活动的动态模拟。色棒5是由透光材料制成的长杆,材质包括但不限于pmma、pe、fep等透光材料。长杆表面自顶部向下分布环状色带,色带颜色自上而下变深或变浅,通过调整rgb值调整颜色深浅。同一长杆上只有一种颜色,色带宽度一致,颜色只能在变深或者变浅择其一,色带颜色变化程度一致。本实施例选择红色,色带宽度为5mm,颜色自上而下变浅。
47.色棒5还以精度高低分类,高精度色棒的色带窄,宽度一般大于等于5mm,小于10mm;低精度色棒的色带宽,一般大于等于10mm,小于30mm。划分的根据是传感器的精度,传感器精度高,则精确度高,对窄色带也能分辨清楚其中颜色及深浅变化;相反,若传感器精度低,则精确度低,对窄色带的颜色及深浅变化难以分辨,只能大致分辨出宽色带的颜色及深浅变化。据已有文献知,近红外光谱检测人脑深度最多达到大脑皮层以下3cm,所以色带宽度不超过3cm,就目前近红外传感器的探测精度可知,色带宽度不能低于5mm,以后可根据近红外传感器的升级以及探测精度的提高再继续调整色环单个宽度和总宽度;色带单个宽度随近红外传感器的尺寸以及检测精度升级革新可继续减少,色带总宽度随近红外光谱探测技术的探测深度增加可继续加宽。色棒5的形状包括但不限于圆柱、长方体、三棱柱等由平面闭合图形拉伸得到的实体形状。
48.生色团模拟模块通过颜色的深浅模拟生色团在光的模态下的浓度变化;通过改变色带材质或加工工艺,改变色棒5吸收和散射光的能力;如通过磨砂工艺或涂抹哑光漆使色带表面粗糙,增加光的漫反射从而加强色带的散射能力。根据检测需要的目标观测量选择色棒颜色,如观测量为血氧饱和度,则优先选择红色的色棒5模拟红细胞。同时根据检测目的选择颜色变深还是变浅的色棒5,例如,若模拟的是人脑血氧活动在表层活动少,深层活动频繁,则选择变深的色棒5;若模拟的是人脑血氧活动表层活动多,深层活动不频繁,则选择变浅的色棒5。
49.如图4,选用透光材质聚甲基丙烯酸甲酯pmma制成的长杆,直径5mm,总长120mm。其长度高出顶箱1高度20mm是为了保证在有误差或结构限制的情况下100mm的长度能完全进入顶箱1。本实施例模仿的环境是表层血氧活动少,深层血氧活动多,包括氧合血红蛋白和脱氧血红蛋白生色团。为此,模仿氧合血红蛋白选用自上而下色带色值范围依次为rgb
(255,120,120)~rgb(255,100,100)、rgb(255,100,100)~rgb(255,80,80)、rgb(255,80,80)~rgb(255,60,60)、rgb(255,60,60)~rgb(255,40,40)、rgb(255,40,40)~rgb(255,20,20)、rgb(255,20,20)~rgb(255,0,0),各个色带内部设计线性变化的色值的色棒5,每条色带宽5mm,色带总宽30mm,称此色棒5为色棒a。色棒颜色自上而下变深,模拟氧合血红蛋白生色团。模仿脱氧血红蛋白选用自上而下色带色值范围依次为rgb(255,120,255)~rgb(255,100,255)、rgb(255,100,255)~rgb(255,80,255)、rgb(255,80,255)~rgb(255,60,255)、rgb(255,60,255)~rgb(255,40,255)、rgb(255,40,255)~rgb(255,20,255)、rgb(255,20,255)~rgb(255,0,255)的色棒5,各个色带内部设计线性变化的色值的色棒5,每条色带宽5mm,色带总宽30mm,称此色棒5为色棒b。色棒颜色自上而下变深,模拟脱氧血红蛋白生色团。
50.人机交互模块包括显示单元、cpu数据分析与处理单元和装置本体开关,cpu数据分析与处理单元为位于底座4内的一块数据分析与传输芯片及终端cpu,显示单元包括底座4的显示屏和终端显示屏。人机交互模块通过cpu数据分析与处理单元输入脑功能活动模式。cpu数据分析与处理单元将处理好的数据传输给运动与控制模块。检测设备采集血氧等相关数据并输入cpu数据分析与处理单元,cpu数据分析与处理单元将检测数据与活动数据模板进行比对,得到被测仪器的精确度。被测仪器检测的某一处传感器的检测数据亦可通过cpu数据分析与处理单元进行实时的数据比对。
51.显示单元包括装置底座4上的显示屏及上位机显示屏,可输入指令并查阅数据。
52.运动与控制模块包括运动单元与控制单元;控制单元包括位于电机下端放置在底座4内的集成芯片,控制单元将接收到的数据形成指令后交由运动单元执行;运动单元与底座4和固定支架2通过螺丝定位安装,运动单元包括升降机构3和执行元件色棒5;升降机构3包括动力源电机和升降部件,整个升降机构3是基于丝杆导轨滑块原理,电机带动丝杆7的转动转化为滑块9的直线运动,导轨8起定位导向作用。如图5所示,升降机构3包括轴承支架6,丝杆7,导轨8,滑块9,步进电机10;为保证行程可控且便于调节,电机一般选用伺服电机;升降部件包括但不限于滑动丝杆、带传动及液压传动等传动部件,以及如连杆机构、司筒司柱、液压推杆等往复运动机构;本实施例选用伺服电机和滑动丝杆组成升降机构3。如图6,a位置即色棒固定位置,将色棒5安装在升降机构3的滑块9的a位置上形成一个完整的运动单元。
53.该装置工作原理为:预先通过人机交互模块在cpu数据分析与处理单元输入脑功能活动数据,cpu数据分析与处理单元将处理好的数据传输给运动与控制模块。运动与控制模块分别包含运动单元与控制单元,其控制单元将接受到的数据形成指令后由运动单元执行,至此,运动单元中主要执行部件色棒5进行往复运动,不同的色棒5组合形成上述生色团模块;然后,近红外等相关检测设备通过本装置设计的对外接口连接,这些检测设备通过采集上述动态仿体装置相关血氧等数据后,与之前预先在cpu数据分析与处理单元输入的脑功能活动数据标准模板比对,即可判断该被测仪器的精确度。同时,被测仪器检测的某一处传感器的检测数据亦可通过本装置实现实时的数据比对。
54.参见图7,本发明的检测方法,包括以下步骤:
55.s1:安装本装置,将待测的近红外检测设备接入装置的对外接口;根据检测目的和目标观测量选择色棒5和脑功能活动数据;
56.s11:将选定色棒5安装到升降机构3上,形成完整的运动单元;
57.s12:将运动单元依次安装到底座4,继而安装固定支架2,最后安装顶箱1。
58.s2:向人机交互模块的cpu数据分析与处理单元输入脑功能活动模式,cpu数据分析与处理单元处理数据并传输给运动与控制模块;
59.s3:运动与控制模块的控制单元接收数据并转换为指令后发送给运动单元;运动单元执行指令,控制升降机构3带动色棒5进行往复运动形成不同的色棒组合,完成对生色团的模拟;
60.s4:接入设备采集动态仿体装置模拟脑活动的包括血氧的数据输入cpu数据分析与处理单元,并与预先输入的脑功能活动模式比对,得出接入设备的精确度报告;接入设备的传感器数据也通过本装置进行实时的数据比对,得到可靠性报告。
61.以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。