技术特征:
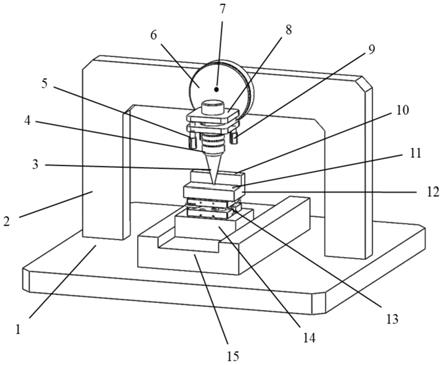
1.一种光学位移测头空间姿态自校准装置,其特征在于包括:基座(1)、龙门架(2)、光学位移测头光束(3)、光学位移测头(4)、电动俯仰姿态调整促动器(5)、摆动台(6)、旋转中心(7)、电动调整架(8)、电动偏摆姿态调整促动器(9)、标准台阶量块高面(10)、标准台阶量块低面(11)、标准台阶量块(12)、工件调平台(13)、直线运动轴动子(14)、直线运动轴定子(15);基座(1)上安装有龙门架(2),龙门架(2)中心固定摆动台(6),摆动台(6)上面安装电动调整架(8),电动调整架由电动俯仰姿态调整促动器(5)与电动偏摆姿态调整促动器(9)驱动,进行光学位移测头(4)的姿态调整;基座(1)中心安装直线运动轴定子(15)与直线运动轴动子(14);直线运动轴动子(14)上方依次安装工件调平台(13)与标准台阶量块(12);光学位移测头(4)发射测量光束(3),可获取标准台阶量块高面(10)与标准台阶量块低面(11)的位置测量。2.根据权利要求1所述的一种光学位移测头空间姿态自校准装置,其特征在于所述的光学位移测头(4)自身回转对称,因此在三维空间的俯仰、偏摆、滚转三个姿态中,滚转运动不产生姿态偏差,只需要校准俯仰姿态偏差与偏摆姿态偏差即可实现三维姿态误差的校准。3.一种光学位移测头空间姿态自校准方法,其特征在于包括以下步骤:步骤1、工件调平:将标准台阶量块(12)放置于工件调平台(13)上,并调整水平;步骤2、俯仰姿态校准:标准台阶量块(12)固定不动,移动直线运动轴(12)与摆动运动轴(6)调整光学位移测头(4)垂直向下测量标准台阶量块低面(11),通过摆动运动轴(7)带动光学位移测头(4)摆动扫描标准台阶量块低面(11),扫描过程中实时记录摆动角度b与测头读数d,根据扫描数据进行最小二乘拟合计算光学位移测头(4)的偏摆姿态角度偏差,并通过电动偏摆姿态调整促动器(9)进行自动校准;步骤3、偏摆姿态校准:光学位移测头(4)固定且垂直向下,通过直线运动轴动子(14)带动标准台阶量块(12)往复运动,以使光学位移测头采集标准台阶量块高面(10)与标准台阶量块低面(11)高度数据,根据两者之间高差与标准台阶量块(12)理论台阶高差之间的关系计算俯仰角度误差,并通过电动俯仰姿态调整促动器(5)进行自动校准。4.根据权利要求3所述的一种光学位移测头空间姿态自校准方法,其特征在于光学位移测头的偏摆姿态校准具体包括以下步骤:2-1.控制光学位移测头(4)垂直向下指向标准台阶量块(12),通过直线运动轴(15)调整标准台阶量块(12)的位置使标准台阶量块低面(11)位于光学位移测头(4)量程;2-2.设定光学位移测头(4)偏摆姿态偏角误差极限为β0;2-3.通过摆动运动轴(6)带动光学位移测头(4)沿逆时针方向扫描,直至被测点超出量程,自动记录超出量程前的摆动运动轴(6)的角度位置为b1;2-4.通过摆动运动轴(6)带动光学位移测头(4)沿顺时针方向扫描,直至被测点超出量程,自动记录超出量程前的摆动运动轴(6)的角度位置为b2;2-5.控制摆动运动轴(6)带动光学位移测头(7)从b1位置扫描到b2位置,在扫描过程中实时记录下摆动运动轴(6)的摆动角度b与光学位移测头(4)的读数d,得到一系列数据组(b
i
,d
i
),i=1,2,3
…
,n;2-6.光学位移测头(4)摆动的平面与标准台阶量块低面(11)之间的交线即为扫描的轨
迹,以旋转中心(7)为原点建立坐标系,则该轨迹满足空间任意直线方程:hx iy j=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中h、i、j为未知数;设旋转中心(7)与标准台阶量块低面(11)的距离为d,光学位移测头(4)垂直位置与标准台阶量块低面(11)法线的偏差为β,光学位移测头(4)量程中心到旋转中心(7)的距离为l;光学位移测头(4)在旋转扫描过程中由旋转中心(7)到被测点之间的距离在标准台阶量块低面(11)法线上的投影始终为d,则可得到以下关系:2-7.每个扫描过程中每组数据(b
i
,d
i
)均满足公式,因此可构建最小二乘算法进行拟合,可求出光学位移测头姿态偏摆角β:2-8.通过电动偏摆姿态调整促动器(9)调整光学位移测头(4)偏摆姿态,调整量为-β;2-9.重复步骤2-4~步骤2-7,验证调整后的光学位移测头(4)偏摆姿态偏角β;如β>β0则重复步骤2-4~步骤2-8,否则即完成光学位移测头(4)偏摆姿态的自校准。5.根据权利要求3或4所述的一种光学位移测头空间姿态自校准方法,其特征在于通过标准台阶量块(12)的标准台阶量块低面(11)构建空间内的基准平面,标定光学位移测头(4)相对于该基准平面法线的夹角来确定光学位移测头(4)的偏摆姿态偏角,从而通过电动偏摆姿态调整促动器(9)的微调运动进行校准。6.根据权利要求3或4所述的一种光学位移测头空间姿态自校准方法,其特征在于俯仰姿态校准具体包括以下步骤:3-1.通过摆动运动轴(6)带动光学位移测头(4)旋转至垂直向下位置;3-2.设定光学位移测头(4)的俯仰姿态偏角误差极限为α0;3-3.控制直线运动轴动子(14)带动标准台阶量块(11)前后扫运动,使光学位移测头(4)可分别测量出标准台阶量块高面(10)的位置d1与标准台阶量块低面(11)的位置d2;3-4.标准台阶量块高面(10)与标准台阶量块低面(11)之间的实际高度差已知为δh,则光学位移测头的俯仰姿态偏角为:3-5.通过电动俯仰姿态调整促动器(5)调整光学位移测头(4)俯仰姿态,调整量为-α;3-6.重复步骤3-3~步骤3-4,验证调整后的光学位移测头(4)俯仰姿态偏角α;如α>α0则重复步骤3-3~步骤3-5,否则即完成光学位移测头(4)俯仰姿态的自校准。7.根据权利要求6所述的一种光学位移测头空间姿态自校准方法,其特征在于通过标准台阶量块高面(10)与标准台阶量块低面(11)之间的已知高度差作为高度基准结合光学位移测头(4)对两者的实际测量结果求解出光学位移测头(4)的俯仰姿态偏角,从而通过电动俯仰姿态调整促动器(5)的微调运动进行校准。
技术总结
本发明公开了一种光学位移测头空间姿态自校准方法与装置。本发明通过光学位移测头扫描标准台阶量块获取测量数据,并通过测头自身的扫描数据标定并校准测头自身空间姿态的自校准方法与装置,该方法结合基于直线促动器的位姿调整机构,可根据扫描结果计算出光学位移测头的俯仰姿态误差及偏摆姿态误差并自动进行校准,实现如光谱共焦传感器、激光干涉仪位移传感器等精密光学位移测头的全自动化空间姿态标定,对于提升集成这类测头的三维形貌仪、非接触轮廓仪等仪器的测量精度与使用效率具有重要意义。本发明可快速有效消除探头的姿态误差,从而提升这类检测系统的测量精度。从而提升这类检测系统的测量精度。从而提升这类检测系统的测量精度。
技术研发人员:居冰峰 张文浩 李畅
受保护的技术使用者:浙江大学
技术研发日:2022.01.10
技术公布日:2022/4/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。