用于在海上船上使用的运动补偿起重机
1.本技术是申请号为201880035848.4,申请日为2018年04月20日,发明名称为“用于在海上船上使用的运动补偿起重机”的发明专利申请的分案申请。
技术领域
2.本发明涉及海上船起重机领域。
3.在特别有吸引力的实施方案中,设想将本发明的起重机用于在漂浮的船上使用,因此在船经受波浪引起的运动的时候起重机是可操作的。如本文中所解释的,本发明的一些方面还适用于具有起重机的船,在船不处于漂浮状态时操作起重机,例如,具有本文所述的起重机的自升式船。
背景技术:
4.在海上风力涡轮机领域,存在提高效率和降低成本的需求,例如,考虑到对于在海上风力涡轮机的安装基座上进行维护工作所需的不断增长的时间和费用,例如在北海、波罗的海、美国沿海水域等。
5.维护工作例如可以包括由高起重机处理位于“机舱的高度处”的海上风力涡轮机的部件,其包括例如处理机舱本身和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,例如齿轮箱、发电机、轮毂和/或叶片。
6.当前的海上风力涡轮机设计提出或已经将机舱设置在海拔100米以上的高度处,例如在120米或更高。因此,处理这些部件需要非常高的起重机。同样,此类部件的质量也可能很大,范围在5吨至150吨之间,其中发电机和齿轮箱等组件的重量位于该范围的上部。
7.风力涡轮机可以是例如通过单桩或护套基座等安装在海床上的类型。在另一种设计中,风力涡轮机实施为位于浮动结构上,因此风力涡轮机也完全暴露于波浪作用并由于波浪作用而移动。
8.在通常的方法中,船是自升式船,其被定位成靠近风力涡轮机,然后将支腿构件伸出,使船至少部分地但基本为全部被举升,以提供用于起重机操作的稳定情况。
9.自升过程及之后的自升式起重船下降的过程很费时,并且在自升位置上,对于波浪高度受到很大的限制,因此当处于恶劣天气时,在天气实际变化之前必须将船很好地置于漂浮状态。这减小了这种船用于海上风力涡轮机相关活动的有效操作窗口。而且通常,航行速度通常小于普通船。
技术实现要素:
10.应当指出,本发明主要被设想用于海上风力涡轮机领域,从而用于维护,并且还用于风力涡轮机的安装和/或拆除。然而,本发明还可以用于其他海上应用中,例如与石油和天然气有关的工作、土木工程操作等。
11.本发明的目的是提供一种改进的起重机,用于在海上船上使用,或者至少是用于这种用途的现有起重机的替代方案。
12.本发明的第一方面提供了一种运动补偿起重机,其用于在漂浮状态的海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修。
13.本发明的第一方面还提供了一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述在机舱上的一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为进行海上风力涡轮机的安装和/或维修。
14.在一个实施方案中,马达驱动的x方向运动位移致动器组件、马达驱动的y方向运动位移致动器组件和z方向升沉运动补偿装置配置为各自分别提供对可移动承载件的x方向运动、可移动吊臂升降缆索悬吊构件的y方向运动以及物体悬吊装置的z方向升沉运动补偿进行的独立控制。
15.在一个实施方案中,马达驱动的x方向运动位移致动器组件包括x方向绞盘及缆索组件,其包括连接至可移动承载件的至少一个x方向缆索和相关联的绞盘,以使可移动承载件在x方向上相对于x方向导轨移动。
16.在一个实施方案中,所述x方向绞盘及缆索组件包括第一x方向缆索和第二x方向缆索,所述第一x方向缆索在其在刚性吊臂框架的第一x方向导轨附近的第一附接点附接到可移动承载件,所述第二x方向缆索在其在刚性吊臂框架的第二x方向导轨附近的第二附接点附接到可移动承载件,其中,所述x方向绞盘及缆索组件包括马达驱动的x方向绞盘,所述马达驱动的x方向绞盘具有可旋转绞盘卷筒,所述可旋转绞盘卷筒具有第一卷筒部段、第二卷筒部段、第三卷筒部段和第四卷筒部段,其中第一x方向缆索的第一端部卷绕到所述第一卷筒部段上,其中第一方向缆索的第二端部以与第一x方向缆索的第一端部的卷绕相反的指向卷绕到所述第二卷筒部段上,并且其中第二x方向缆索的第一端部卷绕到所述第三部段上,并且其中第二x方向缆索的第二端部以与第二x方向缆索的第一端部相反的指向卷绕到所述第四部段上。
17.在一个实施方案中,所述马达驱动的y方向运动位移致动器组件包括y方向绞盘及缆索组件,所述y方向绞盘及缆索组件包括至少一个y方向缆索,所述至少一个y方向缆索连接至所述可移动升降缆索悬吊构件和相关联的绞盘,以使所述可移动升降缆索悬吊构件在所述y方向上相对于所述一个或多个y方向导轨移动。
18.在一个实施方案中,所述y方向绞盘及缆索组件具有单独一个y方向缆索,所述单独一个y方向缆索附接到所述可移动升降缆索悬吊构件和相关联的马达驱动的y方向绞盘,所述相关联的马达驱动的y方向绞盘具有可旋转绞盘卷筒,所述可旋转绞盘卷筒具有第一卷筒部段和第二卷筒部段,其中所述单独一个y方向缆索的第一端部卷绕到所述第一卷筒部段上,并且所述单独一个y方向缆索的第二端部以与y方向缆索的第一端部的卷绕相反的指向卷绕到第二卷筒部段上。
19.在一个实施方案中,所述可移动吊臂升降缆索悬吊构件包括第一顶部滑轮、第二顶部滑轮、第三顶部滑轮和第四顶部滑轮,其中,沿y方向观察,所述可移动承载件在其相对
的位置处设置有第一缆索引导滑轮和第二缆索引导滑轮。所述吊臂升降缆索从其第一端部沿正x方向通过到所述可移动承载件上的所述第一缆索引导滑轮,然后从可移动承载件上的所述第一缆索引导滑轮通过到第一顶部滑轮,经由第一底部滑轮通过到第二顶部滑轮,从所述第二顶部滑轮通过到可移动承载件上的第二缆索引导滑轮,其中所述刚性吊臂框架设置有第三缆索引导滑轮和第四缆索引导滑轮,第三缆索引导滑轮和第四缆索引导滑轮每个都在刚性吊臂框架的相应的第二x方向导轨和第一x方向导轨的端部附近,并且其中吊臂升降缆索从可移动承载件上的第二缆索引导滑轮在所述正x方向上延伸到所述刚性吊臂框架上的所述第三缆索引导滑轮,并且从所述第三缆索引导滑轮延伸到所述第四缆索引导滑轮。所述可移动承载件进一步设置有第五缆索引导滑轮和第六缆索引导滑轮,所述第五缆索引导滑轮在所述第一缆索引导滑轮的附近,所述第六缆索引导滑轮在所述第二缆索引导滑轮的附近,
20.其中所述吊臂升降缆索从刚性吊臂框架上的所述第四缆索引导滑轮沿负x方向延伸至可移动承载件上的所述第五缆索引导滑轮,并从所述第五缆索引导滑轮通过至第三顶部滑轮,向下通过到第二底部滑轮并且向上通过到第四顶部滑轮,并且从所述第四顶部滑轮到第六缆索引导滑轮,吊臂升降缆索从所述第六缆索引导滑轮沿负x方向延伸至升降缆索的所述第二端部。吊臂升降缆索的所述第一端部和第二端部中的至少一个连接到升降绞盘。
21.在一个实施方案中,第一吊臂升降绞盘连接至所述第一端部,例如所述第一吊臂升降绞盘具有卷筒,所述第一端部卷绕到该卷筒上,其中第二吊臂升降绞盘连接至第二端部,例如第二吊臂升降绞盘具有卷筒,所述第二端部卷绕到该卷筒上,其中可移动吊臂升降缆索悬吊构件包括具有水平滑轮轴线的第三顶部滑轮和第四顶部滑轮,其中所述物体悬吊构件包括第二底部滑轮,其中所述吊臂升降缆索以双辘绳布置方式在第三顶部滑轮和第四顶部滑轮与所述第二底部滑轮之间延伸,因此在所述可移动吊臂升降缆索悬吊构件与所述物体连接构件之间以四辘绳布置方式延伸。
22.在一个实施方案中,至少一个吊臂升降绞盘是主动运动补偿绞盘(ahc绞盘)。
23.在一个实施方案中,马达驱动的x方向运动位移致动器组件和/或马达驱动的y方向运动位移致动器组件包括齿条-小齿轮驱动装置或线性致动缸驱动装置,例如具有一个或多个液压致动缸。
24.在一个实施方案中,一个或多个x方向导轨实施为提供至少3米(例如至少4米,例如5米至8米之间,例如大约6米)的可移动承载件的x方向运动范围。
25.在一个实施方案中,一个或多个y-方向导轨实施为提供至少2米(例如至少3米,例如在3米至5米之间,例如大约4米)的可移动升降缆索悬吊构件的y方向运动范围。
26.在一个实施方案中,刚性悬臂具有内端部和外端部,所述内端部枢转地固定到主悬臂的所述末端,而所述外端部远离所述末端。
27.在一个实施方案中,刚性吊臂框架具有第一x方向框架梁和平行的第二x方向框架梁,所述第一x方向框架梁设置有所述第一x方向导轨,所述第二x方向框架梁设置有所述第二x方向导轨,例如所述第一x方向框架梁和所述第二x方向框架梁均实施为在外部设置有所述相应x方向导轨的中空箱形梁。
28.在一个实施方案中,所述刚性吊臂框架设置有内部横向框架梁,内部横向框架梁
在所述y方向上延伸并且将第一x方向框架梁和第二x方向框架梁的各自的内端部互相连接,
29.在一个实施方案中,所述刚性吊臂框架设置有外部横向框架梁,所述外部横向框架梁在所述y方向上延伸并且将第一x方向框架梁和第二x方向框架梁的各自的外端部互相连接。
30.在一个实施方案中,所述刚性吊臂框架设置有一个或多个对角撑杆构件,例如,刚性吊臂框架具有第一x方向梁构件和第二x方向梁构件以及内部横向梁构件和外部横向梁构件中的至少一个,内部横向梁构件和外部横向梁构件将第一x方向梁构件和第二x方向梁构件分别在其内端部和外端部处相互连接,例如形成基本矩形的框架部分的拐角,例如刚性框架具有两个对角撑杆构件,其在矩形的框架部分的对角线上的相对的角之间延伸。
31.在一个实施方案中,主悬臂的末端设置有第一铰链构件和第二铰链构件,所述第一铰链构件和所述第二铰链构件在所述y方向上间隔开,例如所述第一铰链构件位于刚性吊臂框架的第一x方向框架梁的内端部附近,例如在第一x方向框架构件的内端部处,第二铰链构件位于刚性吊臂框架的第二x方向框架梁的内端部附近,例如在第二x方向框架构件的内端部处。
32.在一个实施方案中,主悬臂的末端设置有扭转稳定平台。
33.在一个实施方案中,起重机设置有:
[0034]-吊臂框架支杆结构,其具有内端部,该内端部在刚性吊臂框架的枢转轴线附近枢转地连接至刚性吊臂框架,并且吊臂框架支杆结构具有外端部,
[0035]-至少一个前拉杆构件,其从吊臂框架支杆结构的所述外端部延伸到刚性吊臂框架上的远离其枢转轴线的附接点,
[0036]-主悬臂支杆结构,其内端部在主悬臂的末端附近连接到主悬臂,
[0037]-主悬臂后拉杆,其主悬臂支杆结构的外端部与主悬臂的下部之间延伸,
[0038]-可变长度拉杆机构,其设置在主悬臂支杆结构与吊臂支杆结构之间,其中所述可变长度拉杆机构形成所述水平设定组件,并且适于在主悬臂在所述主悬臂工作角度范围内的任何角度上时使刚性吊臂框架设定在校平的位置上。
[0039]
在一个实施方案中,两个前拉杆构件在吊臂框架支杆结构与刚性吊臂框架上的相应的附接点之间延伸,和/或其中两个后拉杆构件在主悬臂支杆结构与主悬臂的下部之间延伸。
[0040]
在一个实施方案中,主悬臂为单独一个桁架式主悬臂。
[0041]
在一个实施方案中,主悬臂具有至少75米的长度,例如在75米至160米之间。
[0042]
在一个实施方案中,主悬臂具有纵向部分,或者在其长度上由两个平行的主悬臂支腿构件组成,优选地为桁架臂支腿构件。
[0043]
在另一个实施方案中,主悬臂为a-框架型。
[0044]
在起重机的一个实施方案中,主悬臂为a-框架型的主悬臂,其内端部枢转地连接至基座结构,该基座结构固定至船的船体。在这种设计中,主悬臂将始终由船的航向控制,这与可转动上层结构的设计相比是一种约束。然而,这种设计可以允许具有所需长度或高度的主悬臂稳性非常大,例如以相对减小的主悬臂的质量实现非常大的稳性,因此具有其自身的优点。
[0045]
在一个实施方案中,刚性吊臂框架具有单独一个吊臂式x框架梁,其设置有至少一个x方向导轨。这种设计可以减轻重量,因此对于起重机的动态特性是有利的。
[0046]
在一个实施方案中,主悬臂的至少顶部实施为中空箱形顶部,因为这在重量相对减轻的情况下提供了增强的刚度。然后,主悬臂的其余部分可以例如制成桁架式设计。
[0047]
在一个实施方案中,吊臂升降系统的升降能力在距可转动上层结构的竖直轴线30米至50米之间的半径处为至少150mt。
[0048]
在一个实施方案中,主悬臂设置有一个或多个牵引绞盘,例如在主悬臂的末端附近和/或在吊臂框架上,每个牵引绞盘设置有牵引缆索,牵引缆索可附接到物体和/或附接到从吊臂升降缆索悬吊的物体悬吊装置。
[0049]
在一个实施方案中,主动运动阻尼机构安装至吊臂框架或在主悬臂的末端附近安装至主悬臂,该主动运动阻尼机构包括固体运动阻尼压载物和阻尼压载物驱动及控制系统,固体运动阻尼压载物相对于吊臂框架或塔架的末端在运动阻尼方向上可移动,阻尼压载物驱动及控制系统配置成引起并控制固体阻尼压载物的运动,例如响应于运动检测传感器的输出。例如,第一固体运动阻尼压载物配置为沿x方向移动和/或第二固体运动阻尼压载物配置为沿y方向移动。
[0050]
在一个实施方案中,设想主动运动阻尼机构在拾取载荷和装卸载荷(例如部件的载荷,将部件从机舱移除或放置在机舱中)的相对短的时间段内操作。
[0051]
例如,例如主动运动阻尼机构可释放地安装至吊臂框架或在主悬臂的末端附近可释放地安装至主悬臂,例如,使得当需要处理较重载荷时,通移除主动运动阻尼机构来增大有效升降能力。
[0052]
在一个实施方案中,起重机具有主升降系统,其包括布置在主悬臂的末端附近的顶部滑轮组件,主升降单元具有多个滑轮、主升降缆索和主升降绞盘,其中主升降单元通过以多辘绳布置方式的主升降缆索从顶部滑轮组件悬吊。
[0053]
在一个实施方案中,主升降单元是具有相对的端部的长形升降单元,其中主升降系统包括左侧顶部滑轮组和右侧顶部滑轮组,左侧顶部滑轮组与右侧顶部滑轮组在y方向上在主悬臂的所述末端上间隔开,其中长形升降单元设置有左侧底部滑轮组和右侧底部滑轮组,左侧底部滑轮组和右侧底部滑轮组以多辘绳布置方式分别从所述左侧顶部滑轮组件和所述右侧顶部滑轮组件悬吊,所述长形升降单元在y方向上延伸,并且其中物体连接构件(例如吊钩)居中地布置在长形升降单元下方。
[0054]
在一个实施方案中,起重机的主升降系统在距可转动上层结构的竖直轴线30米至50米之间的半径处具有至少400mt的升降能力。
[0055]
在一个实施方案中,基座结构包括从所述船的甲板向上延伸的圆柱形桶座或底座,并且其中转动支承部安装在圆柱形桶座或底座的顶端部。底座可以具有正方形或矩形截面。
[0056]
在一个实施方案中,上层结构包括起重机壳体和龙门式结构,龙门式结构竖立在起重机壳体上并由起重机壳体支承,其中起重机壳体经由转动支承部安装在基座结构上,其中起重机的主悬臂变幅组件包括主悬臂变幅缆索及绞盘系统,所述绞盘系统包括变幅缆索,所述变幅缆索在所述龙门式结构与主悬臂之间延伸,适于通过变幅绞盘使悬臂上下枢转,并且适于将主悬臂设定在所述工作角度内的一个或多个所需角度上。
[0057]
在一个实施方案中,起重机壳体包括在起重机壳体前侧的一个或多个主悬臂支撑件,其中龙门式结构包括基本竖直的后龙门式框架构件,基本竖直的后龙门式框架构件在其下端部连接至起重机壳体的后侧,并且其中龙门式结构包括前龙门式框架构件,前龙门式框架构件在其上端部附接至后龙门式框架构件,并倾斜地向前延伸到起重机壳体上的靠近一个或多个主悬臂支撑件的附接件。
[0058]
在一个实施方案中,起重机壳体包括在所述y方向上彼此间隔开的左侧主悬臂支撑件和右侧主悬臂支撑件。
[0059]
在一个实施方案中,起重机设置有一个或多个吊臂缆索定向传感器,例如一个或多个摄像机或倾斜传感器,其适于感测吊臂升降缆索的一个或多个辘绳相对于吊臂框架的实际定向,例如,考虑到风使物体和/或物体连接器构件从可移动吊臂升降缆索悬吊构件竖直下方的位置偏斜。
[0060]
在一个实施方案中,起重机设置有一个或多个机舱位置检测器,其适于感测机舱和/或机舱中或机舱上的一个或多个部件的相对于吊臂框架的实际位置,例如,其中所述机舱位置检测器包括一个或多个雷达装置。
[0061]
在一个实施方案中,起重机设置有一个或多个传感器,其适于感测主悬臂的实际偏斜,例如装配在主悬臂上的一个或多个应变仪。
[0062]
在一个实施方案中,惯性测量装置安装在所述主悬臂或所述吊臂框架的末端,所述惯性测量装置提供一个或多个参考信号,基于这些信号来计算并提供用于所述马达驱动的x方向运动位移致动器组件、所述马达驱动的y方向运动位移致动器组件和所述z方向升沉运动补偿装置的控制信号,这些控制信号中的每一个配置为独立地控制可移动承载件的x方向运动、可移动吊臂升降缆索悬吊构件的y方向运动以及物体悬吊装置的z方向升沉运动补偿。
[0063]
在一个实施方案中,运动补偿支撑装置控制器关联到卫星定位系统,例如gps系统,其基于卫星信号提供坐标。例如,相应的接收器安装在悬臂的末端和/或吊臂框架上和/或悬吊构件上,以提供起重机的各个部分的位置信息,该位置信息可用于控制运动补偿支撑装置。鉴于差分gps系统,其为位置的确定提供了增强的准确性,从而可以将信标或固定基准安装在风力涡轮机上,例如安装在机舱上。
[0064]
在一个实施方案中,至少三个吊臂升降缆索各自从相应的吊臂升降绞盘延伸到载荷连接器,缆索延伸以限定从载荷连接器向上发散的倒金字塔。
[0065]
在一个实施方案中,载荷连接器包括上部分和可旋转的下部分(例如吊钩),所述上部分从一个或多个吊臂升降缆索悬吊,可旋转的下部分配置为连接到载荷并且相对于载荷连接器的上部分可旋转。这允许绕载荷连接器的竖直轴线旋转物体载荷,其中优选地,所述下部分相对于所述上部分的旋转由控制装置控制,例如,如果存在的话,则为机动旋转驱动装置,从而控制所述旋转并由此控制载荷在其水平平面中的实际角度位置。
[0066]
本发明的第一方面还涉及设置有这种起重机的船,并且还涉及使用所述起重机和/或船处理载荷的方法,例如,如本文所述的载荷。
[0067]
本发明的第二方面涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,
所述一个或多个部件例如齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0068]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端,
[0069]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0070]
其中,主悬臂优选地具有长度和主悬臂工作角度范围,使得主悬臂的末端可定位在某一位置上,在该位置上所述末端在船的船体的设计吃水线以上至少100米处,
[0071]-可移动升降缆索悬吊构件,
[0072]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0073]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在两个方向上提供运动补偿,例如沿相互正交的x-y方向,
[0074]
其特征在于,起重机设置有主动运动阻尼机构,其安装至运动补偿支撑装置(例如本文所述的吊臂框架),或安装至主悬臂的末端附近的主悬臂,该主动运动阻尼机构包括运动阻尼压载物和阻尼压载物驱动及控制系统,运动阻尼压载物相对于运动补偿支撑装置或主悬臂在运动阻尼方向上可移动,阻尼压载物驱动及控制系统配置为引起和控制运动阻尼压载物的运动,例如响应于运动检测传感器的输出。例如,第一运动阻尼压载物配置为沿x方向移动和/或第二运动阻尼压载物配置为沿y方向移动。
[0075]
装配至主悬臂末端的运动补偿支撑装置可以如参考本发明的第一方面所讨论的那样实施。在可替代的设计中,运动补偿支撑装置可以包括剪叉机构,该剪叉机构在水平平面中可操作并由水平设定机构校平。
[0076]
代替在x方向和y方向上的移动性,装配到起重机的主悬臂末端的起重机的运动补偿支撑装置可以配置为提供绕竖直轴线的旋转以及在相对于所述竖直轴线的径向方向上的线性延伸和缩回。可以将其识别为phi,r机构,即旋转方向和径向方向。
[0077]
在一个实施方案中,这里参考共同待审的nl2017937和pct/nl2017/050812申请,其通过引用并入本文。
[0078]
例如,如所述文献中所示,起重机包括:
[0079]-基座结构,其适于安装在船上;
[0080]-可转动上层结构,其适于绕基本竖直的转动轴线相对于基座结构转动;
[0081]-悬臂结构,其安装至上层结构并且在其第一端部枢转地连接,以相对于上层结构绕基本水平的悬臂枢转轴线枢转;
[0082]-运动补偿支撑装置,其安装至悬臂结构的末端部分;
[0083]-升降绞盘、升降缆索以及从所述升降缆索悬吊的物体悬吊装置,其中,升降绞盘安装在可转动上层结构上或安装在悬臂结构上,并且其中升降缆索从升降绞盘延伸至悬臂结构的所述部分,然后沿着运动补偿支撑装置延伸到物体悬吊装置;
[0084]-可选地,作用在升降缆索上的升沉补偿装置,其中,该升沉补偿装置集成在升降绞盘中和/或布置成作用在升降绞盘和悬臂结构的所述部分中间的升降缆索上;以及
[0085]-控制单元,
[0086]
其中,运动补偿支撑装置包括:
[0087]
ο底座构件,其可移动地(例如枢转地)连接到悬臂结构的所述部分,例如从而绕平行于基本水平的悬臂枢转轴线的基本水平的底座构件枢转轴线枢转;
[0088]
ο水平设定装置,其布置在悬臂结构与底座构件之间,并且适于将底座构件设定在水平位置;
[0089]
ο吊臂梁,其安装至底座构件,其中吊臂梁绕基本竖直的旋转轴线相对于底座构件可旋转,其中吊臂梁(55)在远离基本竖直的旋转轴线的基本水平的方向上延伸,其中升降缆索在吊臂梁上的升降位置与距基本竖直的旋转轴线一定距离处的物体悬吊装置之间延伸,并且其中所述距离是可调节的,
[0090]
其中,吊臂梁承载滑轮装置,滑轮装置具有位于吊臂梁的前部的前部滑轮、远离所述前部滑轮的后部滑轮以及第一引导滑轮,升降缆索从前部滑轮延伸到物体悬吊装置的滑轮,第一引导滑轮布置成使得所述升降缆索从物体悬吊装置的滑轮经由第一引导滑轮延伸到吊臂梁支撑构件并且其终端部连接至此,
[0091]
其中,吊臂梁支撑构件承载第二引导滑轮,所述升降缆索从第二引导滑轮延伸到吊臂梁上的后部滑轮,
[0092]
其中,优选地,第一引导滑轮和第二引导滑轮布置成使得在吊臂梁支撑构件上的第二引导滑轮与所述终端部之间的升降缆索的长度基本恒定,而与吊臂梁相对于吊臂梁支撑构件的线性位置无关,
[0093]
其中,控制单元提供波浪引起的运动补偿模式,其中旋转吊臂梁,并且调节所述距离以保持物体悬吊装置的预定的x-y位置,
[0094]
并且其中,可选地设置为,在存在时,升沉补偿装置是可操作的,以补偿物体悬吊装置的波浪引起的z方向运动。
[0095]
在所述的nl2017937和pct/nl2017/050812中示出了这种起重机的示例性实施方案。
[0096]
例如,如所述文献中所示,起重机包括:
[0097]-基座结构,其适于安装至船;
[0098]-上层结构,其布置成绕基本竖直的转动轴线相对于基座结构转动;
[0099]-悬臂结构,其第一端部枢转地安装至所述上层结构,以绕基本水平的悬臂枢转轴线相对于上层结构枢转;
[0100]-运动补偿支撑装置,其安装至悬臂结构的相对所述第一端部的末端部分;
[0101]-升降绞盘、升降缆索和从所述升降缆索悬吊的物体悬吊装置,其中所述升降缆索至少沿着运动补偿支撑装置延伸到物体悬吊装置;
[0102]-升沉补偿装置,其作用在所述升降缆索上;以及
[0103]-控制单元,
[0104]
其中,运动补偿支撑装置包括:
[0105]
ο底座构件,其安装至悬臂结构的末端部分;
[0106]
ο吊臂梁,其安装至底座构件,其中吊臂梁绕基本竖直的旋转轴线相对于底座构件可旋转,其中吊臂梁在远离基本竖直的旋转轴线的基本水平的方向上延伸,其中升降缆索
在吊臂梁上的升降位置与距基本竖直的旋转轴线一定距离处的物体悬吊装置之间延伸,并且其中所述距离是可调节的,
[0107]
其中,控制单元提供波浪引起的运动补偿模式,其中转动吊臂梁并且所述距离是可调节的,从而保持物体悬吊装置的预定的x-y位置。
[0108]
并且其中,升沉补偿装置是可操作的,以补偿物体悬吊装置的波浪引起的z方向运动。
[0109]
在所述的nl2017937和pct/nl2017/050812中示出了这种起重机的示例性实施方案。
[0110]
例如,一个或多个固体压载物构件(例如钢或其它刚性材料(例如混凝土)的块或板)安装在一个承载件上或安装在多个承载件上,所述承载件沿直线轨道可移动,例如所述直线轨道安装在刚性吊臂框架的梁上,例如所述梁在x方向或y方向上延伸。例如,一个或多个固体压载物构件通过绞盘及缆索装置移动,从而周期性地以提供主动运动补偿的方式进行往复运动。
[0111]
在一个实施方案中,设想主动运动阻尼机构在拾取载荷和装卸载荷(例如部件的载荷,将部件从机舱移除或放置在机舱中)的相对短的时间段内操作。
[0112]
运动阻尼压载物可以是固体运动阻尼压载物,例如为钢制的一个或多个压载物构件,例如钢板,混凝土等。在另一示例中,压载物可以包括填充液体(例如水或泥浆)的一个或多个可移动箱体。
[0113]
例如,主动运动阻尼机构可释放地安装,例如固体运动阻尼压载物是可移除的,例如使得当需要处理较重载荷时,可以通过移除主动运动阻尼机构来增大有效的升降能力。
[0114]
运动阻尼压载物可以在直线路径中可移动,例如在如优选的一个或多个压载物引导轨道上移动。可选地,可以使运动阻尼压载物绕旋转轴线旋转,例如,使用具有重心与所述旋转轴线偏心的固体阻尼压载物。
[0115]
本发明还涉及一种用于升降载荷的方法,其中使用起重机和/或设置起重机的船,并且其中操作主动运动阻尼机构。
[0116]
主动运动阻尼机构可以在船处于漂浮状态(从而经受海上运动)时对船的起重机进行操作的情况下对海况引起的运动进行补偿。主动运动阻尼机构在其中船处于非漂浮状态下对船的起重机进行操作的实施方案中也可以是有利的,例如,配备有起重机的自升式船。
[0117]
主动运动阻尼机构的设置及其操作在处理海上风力涡轮机的一个或多个海上风力涡轮机部件时被考虑是有利的,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部例如齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修。如所解释的,这需要起重机的巨大高度,并因此需要较长的主悬臂,由于例如作用在起重机上的风力、主悬臂中的振动等,即使当起重机安装在船(诸如自升式船)上时,那也会在末端处表现出运动。
[0118]
本发明的第二方面还涉及设置有这种起重机的船,并且还涉及使用所述起重机和/或船处理载荷的方法,例如,如本文所述。
[0119]
本发明的第三方面涉及一种运动补偿起重机,其适于安装或安装在海上船上,该海上船具有带有设计吃水线的船体,所述起重机配置为用于处理海上风力涡轮机的一个或
多个海上风力涡轮机部件,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为用于海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0120]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端;
[0121]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0122]
其中,主悬臂具有长度和主悬臂工作角度范围,使得其末端定位在某一位置上,在该位置上末端在船的船体的设计吃水线以上至少100米处,
[0123]-可移动升降缆索悬吊构件,
[0124]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0125]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括一个或多个马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在一个方向上提供运动补偿,例如至少在两个方向上(例如在正交的x-y方向)上提供运动补偿,
[0126]
其特征在于,起重机设置有一个或多个机舱位置检测器,其配置为感测机舱和/或机舱中或机舱上的一个或多个部件的实际位置和/或运动,并且其中,所述一个或多个机舱位置检测器关联到所述运动补偿支撑装置控制器。
[0127]
在一个实施方案中,一个或多个机舱位置检测器安装在主悬臂的末端附近和/或安装在运动补偿支撑装置上。
[0128]
在一个实施方案中,一个或多个机舱位置检测器包括以下中的一个或多个:
[0129]-雷达探测器,
[0130]-激光测距检测器,例如采用lidar技术,
[0131]-摄像机。基于在计算机上运行的适当的图像处理软件,可以处理摄像机图像并且由此检测机舱的位置和/或运动。
[0132]
本发明还涉及一种用于升降载荷的方法,其中使用起重机和/或设置有起重机的船,并且其中操作一个或多个机舱位置检测器。
[0133]
在船的起重机在船处于漂浮状态下上(从而经受海上运动)进行操作的情况下,提供一个或多个机舱位置检测器是有利的。在其中船处于非漂浮状态下操作船(例如,配备有起重机的自升式船)的起重机的实施方案中,设置一个或多个机舱位置检测器也可以是有利的。
[0134]
本发明的第三方面还涉及设置有这种起重机的船,并且还涉及使用所述起重机和/或船处理载荷的方法,例如,如本文所述。
[0135]
本发明的第四方面涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0136]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离
所述内端部的末端;
[0137]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0138]
其中,主悬臂优选地具有长度和主悬臂工作角度范围,使得主悬臂的末端可定位在某一位置上,在该位置上末端在船的船体的设计吃水线以上至少100米处,
[0139]-可移动升降缆索悬吊构件,
[0140]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0141]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括一个或多个马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在一个方向上提供运动补偿,例如至少在两个方向上(例如在正交的x-y方向)上提供运动补偿,
[0142]
其特征在于,起重机设置有第一升降绞盘,第一升降绞盘连接到所述升降缆索的第一端部,例如,所述第一吊臂升降绞盘具有卷筒,所述第一端部卷绕在该卷筒上,第二升降绞盘连接到所述升降缆索的第二端部,例如,第二升降绞盘具有卷筒,所述第二端部卷绕到该卷筒上。
[0143]
这种布置提供了冗余并且允许降低和提升载荷的有效速度具有较大范围,例如,在对属于机舱中的部件或风力涡轮机叶片的快速拾取和装卸方面是有利的。
[0144]
在一个实施方案中,第一升降绞盘和第二升降绞盘配置为用于对第一升降绞盘和第二升降绞盘中的每一个进行独立控制。
[0145]
在一个实施方案中,可移动升降缆索悬吊构件包括第一顶部滑轮、第二顶部滑轮、第三顶部滑轮和第四顶部滑轮,每一个均具有水平的滑轮轴线,其中所述物体悬吊构件包括第一底部滑轮和第二底部滑轮,其中所述升降缆索以双辘绳布置方式在所述第一顶部滑轮和所述第二顶部滑轮与所述第一底部滑轮之间延伸,并且以双辘绳布置方式在第三顶部滑轮和第四顶部滑轮与所述第二底部滑轮之间延伸,因此在所述可移动升降缆索悬吊构件与所述物体连接构件之间以四辘绳布置方式延伸。
[0146]
本发明的第四方面还涉及设置有这种起重机的船,并且还涉及使用所述起重机和/或船处理载荷的方法,例如,如本文所述。
[0147]
本发明还涉及一种用于升降载荷的方法,其中使用起重机和/或设置起重机的船。
[0148]
本发明的第四方面在船处于漂浮状态(从而经受海上运动)时对船的起重机进行操作是有利的,但是在其中船处于非漂浮状态时对船的起重机进行操作的实施方案中也是有利的,例如装配有起重机的自升式船。
[0149]
本发明的第五方面涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0150]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端,
[0151]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0152]
其中,主悬臂具有长度和主悬臂工作角度范围,使得所述主悬臂的末端定位在某一位置上,在该位置上所述末端在船的船体的设计吃水线以上至少100米处,
[0153]-可移动升降缆索悬吊构件,
[0154]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0155]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在两个方向上提供运动补偿,例如在正交的x-y方向上提供运动补偿,
[0156]
其特征在于,一个或多个马达驱动的运动位移致动器组件设置有离合器装置,其配置为在停电情况下提供运动补偿支撑装置的自由浮动模式。
[0157]
本发明的第五方面还涉及设置有这种起重机的船以及操作所述起重机的方法,其中离合器装置在停电情况下提供(优选地自动提供)运动补偿支撑装置的自由浮动模式。
[0158]
本发明的第五方面还涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所处处理例如海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0159]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端;
[0160]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0161]
其中,主悬臂具有长度和主悬臂工作角度范围,使得所述主悬臂的末端定位在某一位置上,在该位置上末端在船的船体的设计吃水线以上至少100米处,
[0162]-可移动升降缆索悬吊构件,
[0163]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0164]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括电动马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在两个方向上提供运动补偿,例如在正交的x-y方向,
[0165]
其特征在于,起重机设置有一个或多个备用能量存储设备,该备用能量存储设备配置为在船上停电的情况下向至少所述电动马达驱动的运动位移致动器组件提供电力,例如所述一个或多个备用能量存储设备包括:
[0166]-备用电池,
[0167]-超级电容器装置,
[0168]-联接到发电机的飞轮,
[0169]-备用燃料动力发电机。
[0170]
本发明的第五方面还涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡
轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0171]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端;
[0172]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0173]
其中,主悬臂具有长度和主悬臂工作角度范围,使得所述主悬臂的末端定位在某一位置上,在该位置上末端在船的船体的设计吃水线以上至少100米处,
[0174]-可移动升降缆索悬吊构件,
[0175]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0176]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括液压马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在两个方向上提供运动补偿,例如在正交的x-y方向上提供运动补偿,
[0177]
其特征在于,起重机设置有一个或多个备用能量存储设备,该备用能量存储设备配置为在船上停电的情况下向至少液压马达驱动的运动位移致动器组件提供液压动力,所述一个或多个备用能量存储设备例如包括:
[0178]-液压蓄能器,
[0179]-一组压缩气体(例如氮气)存储容器,其连接到气体加压液压致动缸,其液压腔室连接到所述液压马达驱动的运动位移致动器组件。
[0180]
本发明的第五方面还涉及设置有这种起重机的船。
[0181]
本发明还涉及一种用于升降载荷的方法,其中使用起重机和/或设置起重机的船。
[0182]
本发明的第六方面涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0183]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端;
[0184]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0185]
其中,主悬臂具有长度和主悬臂工作角度范围,使得所述主悬臂的末端定位在某一位置上,在该位置上末端在船的船体的设计吃水线以上至少100米处,
[0186]-可移动升降缆索悬吊构件,
[0187]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0188]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括一个或多个马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在一个方向上提供运动补偿,
例如至少在两个方向(例如在正交的x-y方向)上提供运动补偿,
[0189]
其特征在于,起重机设置有惯性测量装置,其安装在主悬臂的末端附近,和/或安装在船的船体上或安装在刚性地连接至船的船体的部件上,例如起重机的基座结构上,
[0190]
并且其中所述一个或多个惯性测量装置提供一个或多个参考信号,基于所述一个或多个参考信号,计算并提供用于所述马达驱动的运动位移致动器组件的控制信号给运动补偿支撑装置控制器。
[0191]
本发明的第六方面还涉及设置有这种起重机的船。
[0192]
本发明还涉及一种用于升降载荷的方法,其中使用起重机和/或设置起重机的船。
[0193]
本发明的第六方面还涉及一种借助于起重机处理一个或多个海上风力涡轮机部件的方法,例如处理海上风力涡轮机的机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0194]-可移动升降缆索悬吊构件,
[0195]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0196]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,该运动补偿支撑装置包括一个或多个马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为在一个或多个(至少两个)方向上提供运动补偿,例如在正交的x-y方向,
[0197]
其特征在于,第一惯性测量装置安装在机舱上或安装在机舱附近,并且配置为提供表示风力涡轮机机舱或其附近的实际运动的一个或多个第一参考信号,第二惯性测量装置安装在起重机上,例如在起重机的主悬臂的末端附近,所述第二惯性测量装置配置为提供表示起重机的实际运动的一个或多个第二参考信号,
[0198]
其中运动补偿支撑装置控制器关联到所述第一惯性测量装置和所述第二惯性测量装置,并且配置为基于所述第一参考信号和所述第二参考信号计算并提供用于所述一个或多个马达驱动的运动位移致动器组件的控制信号。
[0199]
该布置允许对机舱和/或风力涡轮机自身的塔架的顶端的运动(例如由风和/或波浪引起的)进行有效地补偿。
[0200]
在一个实施方案中,第一参考信号无线传输到运动补偿支撑装置控制器。
[0201]
本发明的第七方面涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0202]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端;
[0203]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0204]
其中,主悬臂具有长度和主悬臂工作角度范围,使得所述主悬臂的末端定位在某一位置上,在该位置上末端在船的船体的设计吃水线以上至少100米处,
[0205]-可移动升降缆索悬吊构件,
[0206]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0207]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在两个方向上提供运动补偿,例如在正交的x-y方向,
[0208]
其特征在于,升降绞盘是主动升沉补偿绞盘(ahc绞盘),并且起重机和/或船(起重机安装在该船上或将要安装在该船上)设置有一个或多个传感器,例如雷达、激光测距装置、摄像机视觉系统、惯性测量装置,其中,所述一个或多个传感器提供一个或多个参考信号,基于所述一个或多个参考信号来提供用于所述主动升沉补偿绞盘的控制信号。
[0209]
本发明的第七方面还涉及设置有这种起重机的船,并且还涉及使用所述起重机和/或船处理载荷的方法,例如,如本文所述。
[0210]
本发明的第八方面涉及一种运动补偿起重机,其用于在海上船上使用,该海上船具有带有设计吃水线的船体,例如用于在处理海上风力涡轮机的一个或多个海上风力涡轮机部件中使用,例如处理机舱和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片,所述处理例如为海上风力涡轮机的安装和/或维修,其中所述起重机包括:
[0211]-主悬臂,其内端部绕基本水平的悬臂枢转轴线枢转地连接,所述主悬臂具有远离所述内端部的末端;
[0212]-主悬臂变幅组件,其适于将主悬臂的角度设定在主悬臂工作角度范围内,
[0213]
其中,主悬臂具有长度和主悬臂工作角度范围,使得所述主悬臂的末端定位在某一位置上,在该位置上末端在船的船体的设计吃水线以上至少100米处,
[0214]-可移动升降缆索悬吊构件,
[0215]-升降绞盘和由所述升降绞盘驱动的升降缆索,该升降缆索从所述可移动升降缆索悬吊构件悬垂,其中,物体悬吊装置从所述升降缆索悬吊,
[0216]
其中可移动升降缆索悬吊构件由运动补偿支撑装置支撑,运动补偿支撑装置装配到主悬臂的末端,该运动补偿支撑装置包括至少一个马达驱动的运动位移致动器组件和运动补偿支撑装置控制器,该运动补偿支撑装置配置为至少在一个方向上提供运动补偿,例如至少在两个方向(例如在正交的x-y方向)上提供运动补偿,
[0217]
其特征在于,主悬臂设置有一个或多个力传感器,该力传感器配置为提供表示主悬臂上的实际载荷的参考信号,其中运动补偿支撑装置控制器关联到所述一个或多个力传感器,并配置为基于所述一个或多个力传感器的所述参考信号计算并提供用于所述一个或多个马达驱动的运动位移致动器组件的控制信号。
[0218]
例如,使用了光纤布拉格光栅力传感器。
[0219]
在这方面设想的是,力传感器可表示主悬臂内的实际偏斜和/或动态运动,然后当进行控制一个或多个马达驱动的运动位移致动器组件时,运动补偿支撑装置控制器将实际偏斜和/或动态运动考虑在内。
[0220]
本发明的第八方面还涉及设置有这种起重机的船。
[0221]
本发明还涉及一种用于升降载荷的方法,其中使用起重机和/或设置起重机的船。
[0222]
应当理解的是,根据本文描述的任何方面的任何措施,包括这里对一个方面的上下文中描述作为可选项或优选项等的那些,其都可以容易地与本文描述的任何其他方面组合。
[0223]
本发明还涉及一种根据本发明的任一方面或多个方面的组合的设置有如本文所描述的起重机的海上船。
[0224]
在一个实施方案中,该船具有半潜式船体,所述半潜式船体具有两个平行的潜入或潜水浮箱、支撑立柱和甲板箱结构,所述支撑立柱从所述浮箱向上延伸,所述甲板箱结构支撑在所述立柱上。
[0225]
应当理解的是,本文描述的本发明的各个方面适用于在处于漂浮状态下当通过起重机处理载荷时对船进行操作,并且适于配置为在非漂浮状态下用于对起重机进行操作的船,例如自升式起重机船。如所解释的,即使当起重机被装在自升式船上并在船升起的情况下操作,由此作为漂浮船不会受到海况的影响时,但用于处理例如待放置在机舱中的部件所需的较高的起重机则会受到运动的影响。同样,即使起重机相对静止,高大的风力涡轮机也会由于风和/或海况而表现出运动。
[0226]
起重机可以是围绕支腿构件的起重机,其中支撑上层结构的支承部安装成围绕自升式船的自升式支腿构件延伸。
[0227]
本发明还涉及一种用于处理海上风力涡轮机的部件的方法,其中使用本文所描述的起重机,例如“在机舱的高度处”的部件,其包括例如处理机舱本身和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,所述一个或多个部件例如为齿轮箱、发电机、轮毂和/或叶片。
附图说明
[0228]
现在将参考附图讨论本发明的各个方面。在附图中:
[0229]
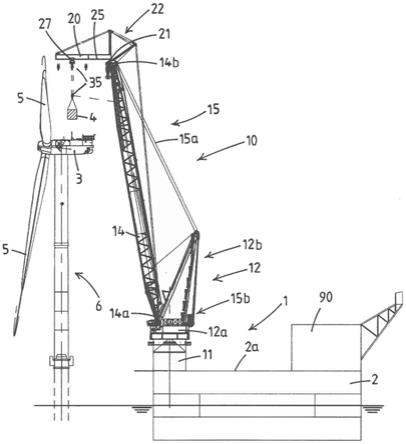
图1示意性地示出了在处理安装在海上风力涡轮机的机舱中或从该机舱中移除的部件的过程中,设置有根据本发明的起重机的海上起重机船的示例,
[0230]
图2示出了图1的船在运输过程中的平面图,
[0231]
图3示出了悬臂的末端在不同位置的特写,
[0232]
图4示出了图1的起重机的x方向、y方向、z方向补偿系统的示意图。
[0233]
图5示出了图1的起重机在x方向上的补偿的示意图,
[0234]
图6示出了图1的起重机在y方向上的补偿的示意图,
[0235]
图7示出了图1的起重机在z方向上的补偿的示意图,
[0236]
图8示出了一个或多个传感器的设置,
[0237]
图9示出了主动阻尼机构的设置,
[0238]
图10示出了其中可以实现本发明的一个或多个方面的船和起重机,
[0239]
图11示出了吊臂升降绞盘及缆索的替代布置。
具体实施方式
[0240]
图1和图2示出了具有用于在海上船上使用的运动补偿起重机10的海上船1。该船具有带有设计吃水线的船体2。该船例如配置为用于处理一个或多个海上风力涡轮机部件,
例如机舱3和/或容纳在机舱中和/或安装在机舱上的一个或多个部件,例如海上风力涡轮机6的齿轮箱、发电机4、轮毂和/或叶片5。这些活动可能涉及海上风力涡轮机6的安装和/或维护。
[0241]
如本领域技术人员应理解的那样,所示的船1是半潜船,其具有两个平行的潜水浮箱、从这些浮箱中的每一个向上延伸的立柱以及由立柱支撑的甲板箱结构,该甲板箱结构具有甲板,基座结构固定至所述甲板。
[0242]
如本领域技术人员应理解的,所示的船1在船的船首处具有船员和桥楼上层结构90。该船在船员和桥楼上层结构90之后具有甲板2a。
[0243]
这里,起重机10安装在船1的船尾处。
[0244]
如图所示,船员和桥楼上层结构不对称地布置在船的船首,例如朝向船的左舷,而起重机10不对称地布置在船的船尾,相对于船员和桥楼上层结构从船的中线相反地布置,例如朝向船的右舷。
[0245]
起重机10包括:
[0246]-基座结构11,其适于固定至船的船体2,这里固定至船的甲板;
[0247]-可转动上层结构12,其安装在基座结构11上,并适于绕基本竖直的转动轴线相对于基座结构转动;
[0248]-回转驱动装置,其适于使所述上层结构转动,例如为齿条和小齿轮驱动装置;
[0249]-主悬臂14,其安装至可转动上层结构12,并在其内端部绕基本水平的悬臂枢转轴线14a枢转地连接至可转动上层结构12,主悬臂具有远离该内端部的末端14b;
[0250]-主悬臂变幅组件15,其适于将主悬臂相对于上层结构的角度设定在主悬臂工作角度范围内。
[0251]
上层结构包括起重机壳体12a和龙门式结构12b,龙门式结构12b竖立在起重机壳体12a上并由起重机壳体12a支撑。起重机壳体12a通过转动支承部安装在基座结构11上。
[0252]
起重机的主悬臂变幅组件15包括主悬臂变幅缆索15a和绞盘系统15b。变幅缆索在龙门式结构12b与主悬臂14之间延伸,允许通过变幅绞盘15b使悬臂14上下枢转,并允许将主悬臂设定在处在其工作范围内的一个或多个所需角度上。
[0253]
起重机壳体12a在起重机壳体的前侧处包括一个或多个主悬臂支撑件。
[0254]
龙门式结构12b包括基本竖直的后龙门式框架构件,基本竖直的后龙门式框架构件在其下端部连接至起重机壳体的后侧,并且龙门式结构包括前龙门式框架构件,前龙门式框架构件在其上端部附接至后龙门式框架构件,并倾斜的向前延伸到位于起重机壳体上的靠近一个或多个主悬臂支撑件的附接件。
[0255]
在一个实施方案中,起重机壳体包括在所述y方向上彼此间隔开的左侧主悬臂支撑件和右侧主悬臂支撑件。例如,主悬臂是双支腿构件式主悬臂,每条支腿构件枢转地固定至相应的主悬臂支撑件。
[0256]
具体地,考虑到将船1部署在海上风电场中,主悬臂14(例如,桁架臂14)具有长度以及主悬臂工作角度范围,使得其末端可定位在某一位置,在该位置中所述末端在所述船的船体的设计吃水线以上至少100米处。
[0257]
起重机进一步包括:
[0258]-刚性吊臂框架20,其绕着基本水平的吊臂框架枢转轴线21枢转地连接至主悬臂
14的末端,
[0259]-水平设定组件22,其适于在主悬臂14在所述主悬臂工作角度范围内的任何角度上时使刚性吊臂框架20设定在校平的位置上。
[0260]
如图所示,刚性吊臂框架20设置有一组平行的x方向导轨25,其垂直于水平吊臂框架枢转轴线21延伸,并且在刚性吊臂框架20的校平的位置上基本水平。
[0261]
如图所示,刚性吊臂框架20具有第一x方向框架梁和平行的第二x方向框架梁,第一x方向框架梁设置有所述第一x方向导轨25a,平行的第二x方向框架梁设置有所述第二x方向导轨25b。例如,第一x方向框架梁和第二x方向框架梁均实施为中空箱形梁,其在外部设置有所述相应的x方向导轨。
[0262]
如图2所示,刚性吊臂框架20设置有外部横向框架梁20a,外部横向框架梁20a在y方向上延伸并且分别与第一x方向框架梁和第二x方向框架梁的外端部相互连接。还可以提供内部横向框架梁,该内部横向框架梁在y方向上延伸并且分别与第一x方向框架梁和第二x方向框架梁的相应内端部相互连接。
[0263]
图2还示出了刚性吊臂框架设置有一个或多个对角撑杆构件20b,例如,刚性吊臂框架具有第一x方向梁构件25a和第二x方向梁构件25b并且具有内部横向梁构件20a和外部横向梁构件20a中的至少一个,内部横向梁构件20a和外部横向梁构件20a分别与第一x方向梁构件和第二x方向梁构件的内端部和外端部相互连接,例如形成基本为矩形的框架部分的拐角。
[0264]
更详细地,起重机10设置有:
[0265]-吊臂框架支杆结构60,其具有内端部61和外端部62,所述内端部61在其枢转轴线21附近枢转地连接至刚性吊臂框架,
[0266]-至少一个前拉杆构件63,其从吊臂框架支杆结构60的外端部62延伸到刚性吊臂框架20上的远离其枢转轴线21的附接点,
[0267]-主悬臂支杆结构65,其内端部66在主悬臂14的末端14b附近连接到主悬臂14,
[0268]-主悬臂后拉杆67,其在主悬臂支杆结构65的外端部68与主悬臂14的下部之间延伸。
[0269]-可变长度支杆机构69,其设置在主悬臂支杆结构66与吊臂支杆结构60之间。该可变长度支杆机构69这里形成水平设定组件22并且适于将刚性吊臂框架20设置在校平的位置上,同时主悬臂14具有在主悬臂工作角度范围内的任何角度。
[0270]
在一个实施方案中,两个前拉杆构件63在吊臂框架支杆结构60与刚性吊臂框架20上的相应附接点之间延伸,例如,每个附接点固定在x导轨25a、25b的端部处。
[0271]
在一个实施方案中,两个后拉杆构件在主悬臂支杆结构与主悬臂的下部之间延伸。
[0272]
起重机10进一步包括:
[0273]-可移动承载件27,其由平行的x方向导轨25支撑并在x方向上相对于x方向导轨25可移动,
[0274]-马达驱动的x方向运动位移致动器组件(参见图5),其适于使可移动承载件27相对于所述x方向导轨25在所述x方向上移动,
[0275]
可移动承载件27设置有一个或多个平行的y方向导轨28,其垂直于x方向导轨25延
伸。
[0276]
起重机10进一步包括:
[0277]-可移动吊臂升降缆索悬吊构件30,其由一个或多个y方向导轨28支撑,并相对于y方向导轨28在y方向上可移动,
[0278]-马达驱动的y方向运动位移致动器组件(参见图6),其适于使可移动吊臂升降缆索悬吊构件30相对于一个或多个y方向导轨28在所述y方向上移动,
[0279]
起重机10进一步包括吊臂升降绞盘32、33和由升降绞盘32、33驱动的吊臂升降缆索34,该吊臂升降缆索34从可移动吊臂升降缆索悬吊构件30悬垂。物体悬吊装置35从吊臂升降缆索34悬吊。
[0280]
起重机10进一步包括z方向升沉运动补偿装置(这里由图7中的aht(主动升沉补偿)绞盘32、33实施),其作用在吊臂升降缆索34上并且集成在吊臂升降绞盘中和/或包括吊臂升降缆索接合构件,该吊臂升降缆索接合构件布置为并适于作用在从吊臂升降缆索悬吊的升降绞盘物体悬吊装置中间的吊臂升降缆索上。
[0281]
图5示出了x方向绞盘及缆索组件,x方向绞盘及缆索组件包括第一x方向缆索40,该第一x方向缆索40在其在刚性吊臂框架20的第一x方向导轨25a附近的第一附接点41处附接到可移动承载件27。第二x方向缆索45在其在刚性吊臂框架20的第二x方向导轨25b附近的第二附接点46处附接到可移动承载件27。
[0282]
x方向绞盘及缆索组件包括马达驱动的x方向绞盘48,其具有可旋转绞盘卷筒49,绞盘卷筒49具有第一卷筒部段、第二卷筒部段、第三卷筒部段和第四卷筒部段。这里,第一x方向缆索40的第一端部40a卷绕到第一卷筒部段上。第一x方向缆索40的第二端部40b以与第一x方向缆索的第一端部40a的卷绕相反的指向而卷绕到第二卷筒部段上。第二x方向缆索45的第一端部45a卷绕到第三部段上,第二x方向缆索45的第二端部45b以与第二x方向缆索的第一端部45a的卷绕相反的指向而卷绕到第四部段上。
[0283]
图6示出了y方向绞盘及缆索组件,y方向绞盘及缆索组件具有附接到可移动升降缆索悬吊构件30的单独一个y方向缆索50以及相关联的马达驱动的y方向绞盘55,该马达驱动的y方向绞盘55具有可旋转绞盘卷筒56,可旋转绞盘卷筒56具有第一卷筒部段和第二卷筒部段。这里,单独一个y方向缆索的第一端部50a卷绕到第一卷筒部段上,而单独一个y方向缆索的第二端部50b以与y方向缆索的第一端部50a的卷绕相反的指向卷绕到第二卷筒部段上。
[0284]
在一个实施方案中,一个或多个马达驱动的运动位移致动器组件,例如与x方向和/或与y方向相关联的绞盘,这里绞盘48、49和55、56上设有离合器装置,该离合器装置配置为在停电时提供运动补偿支撑装置的自由浮动模式。不幸的是,由于各种原因,海上船的确会出现停电事故。通过例如在绞盘驱动马达与卷筒之间设置一个或多个离合器,该离合器在发生停电时自动切换到自由浮动模式,从而避免了从缆索34悬吊的载荷4上的不适当的力。例如,当载荷是仍在机舱3内的齿轮箱时,当在x方向和y方向上都设置有自由浮动模式时,悬吊构件30将大体上居中保持在齿轮箱上方。当然,可以设想的是,控制z方向的绞盘不以自由浮动模式切换。
[0285]
考虑到停电的发生,起重机10可以设置有一个或多个备用能量存储设备,该备用能量存储设备配置为(在船上停电的情况下)至少向电动马达驱动的运动位移致动器组件
(这里为绞盘48、59和55、56以及32、33)提供电力。例如,所述一个或多个备用能量存储设备包括:
[0286]-备用电池,
[0287]-超级电容器装置,
[0288]-联接到发电机的飞轮,
[0289]-备用燃料动力发电机。
[0290]
起重机10可以设置有一个或多个备用能量存储设备,该备用能量存储设备配置为在船上停电的情况下至少向液压马达驱动的运动位移致动器组件提供液压动力。这些一个或多个备用能量存储设备例如包括:
[0291]-液压蓄能器,
[0292]-一组压缩气体(例如氮气)存储容器,其连接到气体加压液压致动缸,气体加压液压致动缸的液压腔室连接到所述液压马达驱动的运动位移致动器组件。
[0293]
图7示出了吊臂升降缆索34具有第一端部34a和第二端部34b。可移动吊臂升降缆索悬吊构件30包括第一顶部滑轮和第二顶部滑轮,这里为四个顶部滑轮30a-30d,每个都具有水平滑轮轴线。
[0294]
物体悬吊构件35包括第一底部滑轮,这里为两个底部滑轮35a、35b。吊臂升降缆索34以双辘绳布置方式而在四个顶部滑轮30a-30d与两个底部滑轮35a、35b之间延伸。
[0295]
如图所示,可移动吊臂升降缆索悬吊构件30包括第一顶部滑轮30a、第二顶部滑轮30b、第三顶部滑轮30c和第四顶部滑轮30d,以实现升降缆索34的四辘绳布置方式。如果需要更多的辘绳,可以提供一对或多对额外的顶部滑轮,并且对于每对顶部滑轮可以设置额外的底部滑轮。
[0296]
可移动承载件27在其沿y方向观察到的相对位置处设置有第一缆索引导滑轮70和第二缆索引导滑轮71。
[0297]
吊臂升降缆索34从其第一端部34a沿例如远离轴线21的正x方向通过到可移动承载件28上的第一缆索引导滑轮70,然后从可移动承载件上的第一缆索引导滑轮70通过到第一顶部滑轮30a,经由第一底部滑轮35a通过到第二顶部滑轮30b,并从第二顶部滑轮30b通过到可移动承载件27上的第二缆索引导滑轮71。
[0298]
刚性吊臂框架设置有第三缆索引导滑轮72和第四缆索引导滑轮73,第三缆索引导滑轮72和第四缆索引导滑轮73分别在刚性吊臂框架的相应第二x方向导轨25b和第一x方向导轨25a的端部附近。
[0299]
吊臂升降缆索34从可移动承载件上的第二缆索引导滑轮71沿所述正x方向延伸到刚性吊臂框架上的所述第三缆索引导滑轮72,并且从第三缆索引导滑轮72延伸至第四缆索引导滑轮73。
[0300]
可移动承载件27进一步设置有第五缆索引导滑轮74和第六缆索引导滑轮75。第五缆索引导滑轮74布置在第一缆索引导滑轮70的附近,而所述第六缆索引导滑轮75在第二缆索引导滑轮71的附近。
[0301]
吊臂升降缆索34从刚性吊臂框架上的第四缆索引导滑轮73沿负x方向延伸至可移动承载件27上的第五缆索引导滑轮74,并从第五缆索引导滑轮74通过至第三顶部滑轮30c,向下通过到第二底部滑轮35b并且向上通过到第四顶部滑轮30d,并且从所述第四顶部滑轮
30d通过到第六缆索引导滑轮75,
[0302]
吊臂升降缆索从第六缆索引导滑轮沿负x方向延伸至升降缆索的所述第二端部34b。
[0303]
吊臂升降缆索的所述第一端部和第二端部中的至少一个连接到升降绞盘32、33。如果仅为一端部提供一个绞盘,则另一端部可以实施为锚固点。
[0304]
在一个实施方案中,第一吊臂升降绞盘32连接到所述第一端部34a,例如,所述第一吊臂升降绞盘具有卷筒,所述第一端部卷绕在该卷筒上,第二吊臂升降绞盘33连接到所述第二端部34b,例如,第二吊臂升降绞盘具有卷筒,所述第二端部卷绕在该卷筒上。
[0305]
图8示意性地示出了起重机10设置有一个或多个吊臂缆索定向传感器,例如一个或多个摄像机110、111,或者设置倾斜传感器,其适于感测吊臂升降缆索34的一个或多个辘绳相对于吊臂框架20的实际定向,例如,考虑到风使物体4和/或物体连接器构件35从位于可移动吊臂升降缆索悬吊构件30竖直下方的位置偏斜。
[0306]
图8示意性地示出了起重机10设置有一个或多个机舱位置检测器120、121,其适于感测机舱3或机舱3的部分和/或机舱中或机舱上的一个或多个部件相对于吊臂框架20的实际位置,例如,其中所述机舱位置检测器包括一个或多个雷达装置、lidar传感器系统和/或一个或多个摄像机。
[0307]
图8示意性地示出了起重机10设置有一个或多个传感器,其适于感测主悬臂14的实际偏斜,例如,一个或多个力传感器,例如装配在主悬臂上的应变仪130。
[0308]
在一个实施方案中,主悬臂设置有一个或多个力传感器130,该力传感器130配置为提供代表主悬臂14上的实际载荷的参考信号,其中运动补偿支撑装置控制器(这里为控制绞盘48、49、55、56)关联到所述一个或多个力传感器130,并配置为基于所述一个或多个力传感器130的所述参考信号来为所述一个或多个马达驱动的运动位移致动器组件运算并提供控制信号。
[0309]
例如,使用了光纤布拉格光栅(bragg grating)力传感器。
[0310]
力传感器可表示主悬臂14内的实际偏斜和/或动态运动,然后当涉及对一个或多个马达驱动的运动位移致动器组件进行控制时,运动补偿支撑装置控制器将所述实际偏斜和/或动态运动考虑在内。
[0311]
图8示意性地示出了起重机10(例如主悬臂14)设置有一个或多个牵引绞盘,例如在主悬臂的末端附近和/或在吊臂框架上。每个牵引绞盘设置有牵引缆索140,其可附接到物体4和/或附接到从吊臂升降缆索34悬吊的物体悬吊装置35。
[0312]
图9示意性地示出了起重机10设置有主动运动阻尼机构150,该主动运动阻尼机构150安装至吊臂框架20。在替代方案中,可将这样的机构安装至主悬臂14,例如在主悬臂14的末端14b附近。
[0313]
主动运动阻尼机构150这里例如包括固体运动阻尼压载物,这里为一个或多个固体运动阻尼压载物,例如多个相互连接的压载物构件151、152、153,例如每个压载物构件在轮式托架上在压载物引导轨道上移动,该压载物沿运动阻尼方向相对于吊臂框架20可移动。一种阻尼压载物驱动及控制系统(这里具有一个或多个绞盘154、155以及连接至固体压载物的一根或多根缆索)配置为引起并控制固体阻尼压载物151、152、153的运动。这可以响应于运动检测传感器170的输出来完成,该运动检测传感器170例如是安装在吊臂框架上
和/或在主悬臂14的顶部附近的惯性测量装置。
[0314]
这里示出的是运动阻尼压载物机构150,其配置为抵消吊臂框架20在x方向上的不适当运动。在另一个实施方案中,或附加地,具有可移动固体压载物的第二运动阻尼机构可以布置和配置为在y方向上操作。
[0315]
在一个实施方案中,设想主动运动阻尼机构150在相对较短的时间内操作进行拾取载荷和装卸载荷(例如部件4的载荷,将部件4从机舱移除或放置在机舱3中)。
[0316]
例如,例如主动运动阻尼机构150可释放地安装至吊臂框架20或在主悬臂的末端附近可释放地安装至主悬臂,例如,使得当需要处理较重载荷时,通移除主动运动阻尼机构来增大有效升降能力。
[0317]
在一个实施方案中,惯性测量装置170安装在主悬臂的末端处或吊臂框架上。该惯性测量装置可提供一个或多个参考信号,基于这些参考信号来计算并提供用于马达驱动的x方向运动位移致动器组件、马达驱动的y方向运动位移致动器组件和z方向升沉运动补偿装置中的至少一个的控制信号,这些控制信号中的每一个配置为独立地控制可移动承载件的x方向运动、可移动吊臂升降缆索悬吊构件的y方向运动以及物体悬吊装置的z方向升沉运动补偿。经过适当地说明,该布置允许补偿吊臂框架和/或主悬臂的运动,例如风引起的运动、海况引起的运动、主吊臂中的振动(例如,由于悬吊在起重机上的载荷相对于主悬臂的移位而引起的)、主悬臂的偏斜等。如所解释的那样,装置170也可以或可替代地配置为主动运动阻尼机构150提供控制信号。
[0318]
代替惯性测量装置170或与惯性测量装置170组合,可以在例如主悬臂的末端处和/或吊臂框架上设置gps接收器。
[0319]
图9示意性地示出了起重机10设置有主升降系统,该主升降系统包括布置在主悬臂14的末端14b附近的顶部滑轮组件160、具有多个滑轮的主升降单元161、主升降缆索162和主升降绞盘(例如在壳体12a上)。主升降单元161通过主升降缆索以多辘绳布置从顶部滑轮组件160悬吊。
[0320]
图10示出了船1和起重机200,其中可以实现本发明的一个或多个方面,例如第二方面、第三方面、第四方面、第五方面、第六方面、第七方面和/或第八方面(或这些方面的任意组合)。起重机在共同待审的pct/nl2017/050812中进行了详细描述,该申请通过引用并入本文。
[0321]
船具有带有甲板2a的船体2。
[0322]
起重机具有底座201、可转动上层结构202、主悬臂203、主悬臂变幅组件205。具有水平设定底座的运动补偿支撑装置220安装在主悬臂203的末端。其吊臂221绕竖直轴线可旋转并且在径向方向上相对于所述竖直轴线可延伸和可缩回。吊臂升降缆索222延伸至载荷连接器223,该载荷连接器223可用于升降载荷(例如,待放置在所描述的海上风力涡轮机的机舱中的部件)。
[0323]
图11示出了吊臂升降绞盘和吊臂升降缆索的替代布置,例如作为图4和图7所示布置的替代方式。
[0324]
这里,至少三个吊臂升降缆索34a、34b、34c各自从相应的吊臂升降绞盘32a、32b、32c延伸到载荷连接器35,缆索34a、34b、34c延伸以限定从载荷连接器35向上发散的倒金字塔。这提供了载荷连接器相对于构件30的位置的稳定性,并且还可以通过四个吊臂升降缆
索及绞盘以四个吊臂升降缆索呈倒金字塔的布置来实现。相应的吊臂升降绞盘32a、32b、32c可以安装在构件30本身上或安装在其他位置处,例如安装在框架20上或在主悬臂14上。例如,吊臂升降绞盘32a、32b、32c实施为ahc(主动升沉补偿)绞盘,或者如图所示,包括升沉补偿致动缸145的升降升沉补偿机构配置为作用在每个吊臂升降缆索34a、34b、34c上。
[0325]
在一个实施方案中,如这里所示,载荷连接器35包括上部分35a和可旋转的下部分35b(例如吊钩),上部分35a从一个或多个吊臂升降缆索34a、34b、34c悬吊,可旋转的下部分35b配置为连接到载荷并且绕竖直轴线155相对于载荷连接器的上部分可旋转。这允许绕载荷连接器的竖直轴线使物体载荷旋转。下部分相对于上部分的旋转由控制装置来控制,例如,如果存在的话,则为机动旋转驱动装置35c,从而控制所述旋转并由此控制载荷4在其水平平面中的实际角度位置。应当理解,如本文所述,可以借助于一个或多个传感器、摄像机等来控制下部分35a的旋转。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
