技术特征:
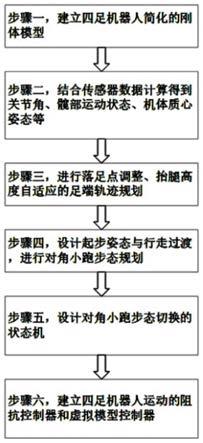
1.基于落足点调整的四足机器人对角步态柔顺控制方法,其特征在于包括以下步骤:1)建立四足机器人简化的刚体模型;2)根据简化后的刚体模型,结合电机编码器、足底激光距离传感器、关节力传感器、imu等传感器数据计算得到关节角、触地信号、髋部运动状态、机体质心姿态;3)进行落足点调整、抬腿高度自适应的足端轨迹规划;4)设计起步姿态与行走过渡,进行对角小跑步态规划;5)设计对角小跑步态切换的状态机;6)建立四足机器人运动的阻抗控制器和虚拟模型控制器。2.如权利要求1所述基于落足点调整的四足机器人对角步态柔顺控制方法,其特征在于在步骤1)中,所述建立四足机器人简化的刚体模型,是在空间中建立世界坐标系、机体坐标系、关节坐标系;为了建模和控制的简单,忽略四条腿的质量和转动惯量,建立四足机器人简化的刚体模型,得到模型的运动学方程、腿部雅可比矩阵。3.如权利要求1所述基于落足点调整的四足机器人对角步态柔顺控制方法,其特征在于在步骤3)中,所述进行落足点调整、抬腿高度自适应的足端轨迹规划的具体步骤如下:步骤3.1,给定摆动相x、y、z三个方向的足端轨迹方程;步骤3.2,根据地形情况,适当地调整足端的抬腿高度。4.如权利要求1所述基于落足点调整的四足机器人对角步态柔顺控制方法,其特征在于在步骤4)中,所述设计起步姿态与行走过渡,进行对角小跑步态规划的具体步骤如下:在踏步的基础上先以半步长运动半个步态周期,然后切换成全步长进行对角小跑运动,这样一方面可以保证机身速度的平稳过渡,不会造成机身速度的突变,另一方面也可以保证足端相对于髋关节的位置保持对称状态,有利于运动的稳定性。5.如权利要求1所述基于落足点调整的四足机器人对角步态柔顺控制方法,其特征在于在步骤5)中,所述设计对角小跑步态切换的状态机的具体步骤如下:步骤5.1,设计对角小跑步态切换的状态机集合;步骤5.2,结合每条腿的触地信息,进行对角小跑状态切换;考虑到实际更多触地情况的状态机切换方法,包括摆动腿着地的先后问题,用于调整机身姿态、提高机身稳定性的四足支撑相。6.如权利要求1所述基于落足点调整的四足机器人对角步态柔顺控制方法,其特征在于在步骤6)中,所述建立四足机器人运动的阻抗控制器和虚拟模型控制器的具体步骤如下:步骤6.1,将每条腿的状态区分为支撑相和摆动相;步骤6.2,对于处于摆动相的腿,设计阻抗控制器;步骤6.3,对于处于支撑相的腿,在其髋部假设三个平动方向的虚拟弹簧阻尼模型计算虚拟力,在质心处假设三个转动自由度的虚拟弹簧阻尼模型计算虚拟力矩进而转化为支撑腿的虚拟力和虚拟力矩;将髋部的虚拟力通过腿部的雅可比矩阵转化为三个关节力矩。
技术总结
基于落足点调整的四足机器人对角步态柔顺控制方法,涉及电驱动四足机器人。包括:建立四足机器人简化的刚体模型;根据简化后的刚体模型,结合电机编码器、足底激光距离传感器、关节力传感器、IMU等传感器数据计算得到关节角、触地信号、髋部运动状态、机体质心姿态;进行落足点调整、抬腿高度自适应的足端轨迹规划;设计起步姿态与行走过渡,进行对角小跑步态规划;设计对角小跑步态切换的状态机;建立四足机器人运动的阻抗控制器和虚拟模型控制器。通过建立一种基于落足点调整的电驱动四足机器人对角小跑步态柔顺行走控制方法,实现四足机器人柔顺且稳定地行走。器人柔顺且稳定地行走。器人柔顺且稳定地行走。
技术研发人员:彭侠夫 张文梁 范德阳 李子航 江浩 李兆路
受保护的技术使用者:厦门大学
技术研发日:2022.01.14
技术公布日:2022/4/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。