1.本发明涉及船舶与海洋工程领域的装备控制技术,特别是一种船载稳定平台镇定控制抗饱和方法。
背景技术:
2.船舶受到风、浪、流等海洋环境影响会产生横摇、纵摇、艏摇、横荡、纵荡和升沉六个自由度的运动,严重影响船上设备的作业安全。船舶动力定位系统可抑制船舶的横荡、纵荡和艏摇运动,而船舶的横摇、纵摇和升沉运动需要通过船载稳定平台来隔离其对船上设备的影响,从而使船载稳定平台上支撑面相对惯性空间保持稳定,使船上设备安全平稳作业。
3.实际中,船载稳定平台由于其执行机构的物理限制,存在输入饱和。由于船载稳定平台的负载的变化、工况突变等原因,船载稳定平台镇定控制系统根据控制算法给出的指令控制输入可能超过其执行机构能够提供的最大控制力,受到输入饱和的影响,船载稳定平台镇定控制的性能会降低,甚至导致镇定控制系统不稳定。因此,研究船载稳定平台镇定控制的抗饱和方法具有重要的现实意义。
4.中国发明专利cn113031429a公开了一种船载载体稳定平台及控制方法,利用pid控制算法实现船载载体稳定平台的镇定控制。中国发明专利cn109739248a公开了一种基于adrc的船载三自由度并联稳定平台稳定控制方法,构造扩张状态观测器估计实时估计船载稳定平台动态不确定和海洋环境扰动引起的船舶摇荡运动对平台造成的等效扰动力构成的总扰动,结合pd控制算法设计了船载载体稳定平台镇定控制律,实现了其镇定控制。然而,上述专利均未考虑船载稳定平台控制输入饱和问题。
5.南京船舶雷达研究所在《雷达与对抗》上发表题为“舰载雷达稳定平台模型参考自适应控制”,考虑船载稳定平台的输入饱和特性,基于自适应技术设计了舰载雷达稳定平台稳定控制律,然而,未对输入饱和进行补偿处理。
6.中国专利cn105676854a提出了一种三自由度直升机抗饱和姿态跟踪控制方法,设计辅助动态系统补偿了直升机姿态跟踪控制输入饱和的影响。然而,由于所设计的辅助动态系统是非连续的,仅仅在控制输入饱和首次发生时具有补偿功能。
技术实现要素:
7.为解决现有技术存在的上述问题,本发明要提出一种船载稳定平台镇定控制抗饱和方法,有效补偿船载稳定平台控制输入饱和的影响,且保证船载稳定平台镇定控制输入饱和再次发生时仍具有抗饱和的能力,从而保证存在输入饱和情况下的船载稳定平台镇定控制。
8.为实现上述目的,本发明的技术方案如下:一种船载稳定平台镇定控制抗饱和方法,所述的船载稳定平台的动力学方程如式(1)所示:
9.10.式中,为船载稳定平台上支撑面在惯性坐标系下的位姿,由升沉位移z、橫摇角和纵摇角θ组成,和分别为p的一阶导数和二阶导数;m(p)∈r3×3为惯性矩阵,为科氏向心力矩阵,g(p)∈r3为重力向量,τ=[τ1,τ2,τ3]
t
为船载稳定平台的控制输入向量,由升沉控制力τ1、橫摇控制力矩τ2和纵摇控制力矩τ3组成。船载稳定平台控制输入饱和的数学描述为:
[0011][0012]
式中,τ
i,max
>0和τ
i,min
<0分别是船载稳定平台控制输入的饱和上界和下界,τ
c,i
为船载稳定平台镇定控制的指令控制输入。记τ
c
=[τ
c,1
,τ
c,2
,τ
c,3
]
t
表示船载稳定平台镇定控制的指令控制输入向量,δτ=τ
c
‑
τ表示船载稳定平台镇定控制的指令控制输入和实际控制输入的偏差。
[0013]
所述的船载稳定平台镇定控制抗饱和方法包括以下步骤:
[0014]
a、设计船载稳定平台的虚拟控制镇定函数
[0015]
设船载稳定平台上支撑面在惯性坐标系中的期望位姿为由期望的升沉位移z
d
、期望的橫摇角和期望的纵摇角θ
d
组成,定义船载稳定平台上支撑面在惯性坐标系下的位姿误差向量为s1=p
‑
p
d
,其一阶导数为:
[0016][0017]
将视为子系统(3)的虚拟控制输入,对设计镇定函数α:
[0018][0019]
式中,k1是3
×
3维的正定设计矩阵。
[0020]
b、设计船载稳定平台抗饱和镇定控制律
[0021]
b1、定义新的误差向量根据式(1)
‑
(4),对s2求导:
[0022][0023]
b2、设计如下辅助动态系统:
[0024][0025]
式中,k
ρ
是3
×
3维的正定设计矩阵;ρ是辅助动态系统的状态向量;φ(s2,δτ,ρ)为一个分段连续函数向量。
[0026]
b3、设计分段连续函数向量φ(s2,δτ,ρ):
[0027][0028]
式中,ρ
a
和ρ
b
均为正的设计常数,且满足ρ
a
<ρ
b
。
[0029]
b4、设计船载稳定平台镇定控制律
[0030][0031]
式中,k2和k
s
是3
×
3维的正定设计矩阵。
[0032]
所述的船载稳定平台镇定控制律包括反馈控制律和抗饱和控制律。所述的反馈控制律用于消除船载稳定平台上支撑面在惯性坐标系中的位姿与期望位姿之间的误差;所述的抗饱和控制律用于补偿船载稳定平台控制输入饱和。
[0033]
与现有技术相比,本发明具有以下有益效果:
[0034]
1、本发明通过设计新型辅助动态系统,并将其状态向量引入船载稳定平台镇定控制律设计中,可以有效补偿船载稳定平台控制输入饱和的影响,保证存在输入饱和情况下的船载稳定平台镇定控制。
[0035]
2、本发明设计的基于连续函数向量的辅助动态系统,能够在船载稳定平台输入饱和重复发生时仍具有输入饱和补偿能力。
附图说明
[0036]
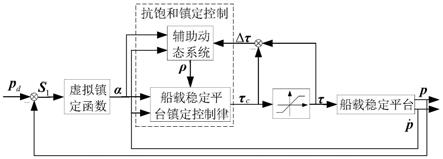
图1为船载稳定平台镇定控制抗饱和方法原理图。
具体实施方式
[0037]
下面结合附图对本发明进行进一步地描述。
[0038]
如图1所示,船载稳定平台镇定控制抗饱和方法原理为:船载稳定平台上支撑面在惯性坐标系下的位姿p反馈到船载稳定平台的参考输入端,并与船载稳定平台上支撑面的期望位姿p
d
进行比较,形成船载稳定平台上支撑面在惯性坐标系下的位姿误差向量s1,基于此,设计船载稳定平台的虚拟控制镇定函数α;设计基于新型分段连续函数向量的辅助动态系统,辅助动态系统利用虚拟控制镇定函数α、船载稳定平台上支撑面位姿的一阶导以及船载稳定平台镇定的指令控制输入和实际控制输入的偏差δτ,产生状态向量ρ;进一步,设计船载稳定平台抗饱和镇定控制律;依据虚拟控制镇定函数α、船载稳定平台上支撑面在惯性坐标系下的位姿的一阶导以及辅助动态系统的状态向量ρ,镇定控制律产生控制输入τ
c
,使船载稳定平台镇定于期望的位姿p
d
,并且具有抗饱和的能力。
[0039]
本发明不局限于本实施例,任何在本发明披露的技术范围内的等同构思或者改变,均列为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。