1.本发明涉及火箭推力控制领域,尤其涉及一种助推与芯级发动机联合推力矢量控制方法。
背景技术:
2.重型运载火箭是未来载人登月、探索火星等空间科学和应用的基础。随着航天活动规模不断增大,对进入空间能力的需求日益提高。因火箭串联级数的增多将带来不可实现的工程风险,大型火箭多选择并联构型;芯级 多个助推器的重型捆绑火箭代表着目前一次性运载火箭技术的最高水平,世界各国均将其研制作为重点方向。
3.并联构型运载火箭在提升运载能力的同时,其干扰力矩也随之增大,传统仅芯级发动机摆动进行控制的方案难以满足稳定控制的要求。国际上先进的大型运载火箭都采用了联合摇摆控制,即助推发动机和芯级发动机联合控制策略。
4.助推发动机和芯级发动机联合控制的动作协调,参数选择合理,能够平稳联动,实现稳定飞行。该技术使运载火箭从单变量控制转变为多变量控制,从芯级单独控制转变为助推和芯级两类发动机联合控制,具有较强的通用性,对于助推发动机摆动参与控制的所有运载火箭普遍适用,为新一代航天运输系统和重型运载火箭研制提供了有益参考。
5.然而,多发动机、多伺服联合的摇摆布局方案,助推发动机摆动参与姿态控制,全箭气动及弹性特性复杂,弹性模态呈现空间分布的特点;存在助推发动机质量偏心问题,以及各台助推发动机开关机不同步问题,从而引入较大的结构干扰和控制干扰。因此,多发动机、多伺服联合的摇摆控制方案,在提高控制能力的同时,对火箭姿态控制提出了较大挑战。
6.虽然现有的液体捆绑运载火箭(液体芯级 液体助推或液体芯级 固体助推)的联合控制技术已经突破并得到应用验证,但对于全固体捆绑运载火箭(固体芯级 固体助推)仍存在尚未解决的控制分配问题,主要原因为固体火箭发动机的推力无法主动控制,固体装药设计与工艺实现难以保证多台发动机工作时的推力保持均匀、一致,且其工作推力大小与工作时长随储存环境温度而显著变化,使得固体捆绑方案存在干扰力矩、控制力矩量级和时段上的不确定性,需要提高控制分配方案的鲁棒性,并根据飞行状态适当进行动态分配。
技术实现要素:
7.本发明提供了一种助推与芯级发动机联合推力矢量控制方法,包括:
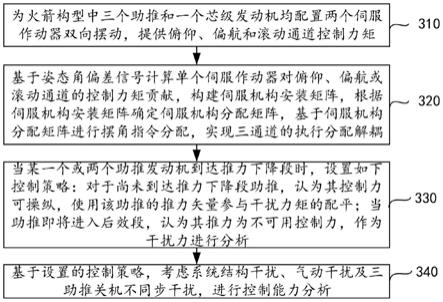
8.为火箭构型中三个助推发动机和一个芯级发动机均配置两个伺服作动器双向摆动,提供俯仰、偏航和滚动通道控制力矩;
9.基于姿态角偏差信号计算单个伺服作动器对俯仰、偏航或滚动通道的控制力矩贡献,构建伺服机构安装矩阵,根据伺服机构安装矩阵确定伺服机构分配矩阵,基于伺服机构分配矩阵进行摆角指令分配,实现三通道的执行分配解耦;
10.当某一个或两个助推发动机到达推力下降段时,设置如下控制策略:对于尚未到达推力下降段助推,认为其控制力可操纵,使用尚未到达推力下降段的助推的推力矢量参与干扰力矩的配平;当助推即将进入后效段,认为其推力为不可用控制力,作为干扰力进行分析;
11.基于设置的控制策略,考虑系统结构干扰、气动干扰及三助推关机不同步干扰,进行控制能力分析。
12.如上所述的一种助推与芯级发动机联合推力矢量控制方法,其中,在火箭构型中三个助推发动机和一个芯级发动机的每个发动机柔性喷管各配置a、b两个伺服作动器双向摆动,提供俯仰、偏航和滚动通道控制力矩。
13.如上所述的一种助推与芯级发动机联合推力矢量控制方法,其中,设δ
ψ
、δ
γ
为基于姿态角偏差信号计算得到的俯仰、偏航、滚动三通道需求摆角,单个伺服作动器对俯仰、偏航或滚动通道的控制力矩贡献为:
[0014][0015]
其中,与分别为发动机b0作动器a、b对应摆角,与分别为发动机b1作动器a、b对应摆角,与分别为发动机b2作动器a、b对应摆角,与分别为发动机b3作动器a、b对应摆角。
[0016]
如上所述的一种助推与芯级发动机联合推力矢量控制方法,其中,构建的伺服机构安装矩阵m为:
[0017][0018]
构建的伺服机构分配矩阵d为:
[0019][0020]
其中,m
·
d=e3,e3为三阶单位矩阵。
[0021]
如上所述的一种助推与芯级发动机联合推力矢量控制方法,其中,设延迟关机的助推推力值为末秒推力为p
disturb
,助推发动机喷管摆心至中轴线距离lb;1个或2个助推延迟关机且推力线与x1轴平行时干扰最大,由关机不同步引起的合成干扰力矩的模相等,均为
[0022]
如上所述的一种助推与芯级发动机联合推力矢量控制方法,其中,关机不同步干扰状态设置如下:
①
干扰起始时刻:相应弹道助推关机时间;
②
干扰结束时刻:相应弹道芯级发动机关机时间。
[0023]
如上所述的一种助推与芯级发动机联合推力矢量控制方法,其中,静态配平摆角最大值分别为标称弹道δ
n,0
、上偏弹道δ
μ,0
,下偏弹道δ
d,0
;在助推耗尽关机时刻附近,箭体质心迁移,如果基本完全抵消助推关机不同步干扰力矩,则所需助推推力线与箭体纵轴夹角约为β
cg
;综合考虑控制能力提高程度与方案可实现性,将助推安装角 耗尽后预置摆角设定为β0,β0<β
cg
,尽量减小干扰力臂。
[0024]
如上所述的一种助推与芯级发动机联合推力矢量控制方法,其中,助推安装角 耗尽后预置摆角设定为β0条件下,同等干扰,静态配平摆角最大值分别为标称弹道δ
n,1
、上偏弹道δ
μ,1
、下偏弹道δ
d,1
,均相应原始弹道配平摆角的1/3。
[0025]
本发明实现的有益效果如下:本发明涉及的火箭构型方案,i级采用3固体助推 1固体芯级的捆绑布局,在满足发射任务的前提下,在各种可选择的方案中规模较小、使用的发动机台数最少,运载效率大幅提升,综合性能优越;并提供对应的控制策略,实现对3固体助推 1固体芯级不对称布局的联合推力矢量控制。
附图说明
[0026]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
[0027]
图1是本发明实施例一提供的一种火箭构型示意图;
[0028]
图2是发动机布局与作动器极性定义示意图;
[0029]
图3是一种助推与芯级发动机联合推力矢量控制方法流程图。
具体实施方式
[0030]
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0031]
在介绍本发明所提供的一种助推与芯级发动机联合推力矢量控制方法之前,先介绍本发明所涉及的火箭构型,如图1所示,火箭i级动力系统由三个助推和一个芯级发动机组成。其中,全箭理论长度为l;cg0表示起飞时刻火箭质心所在位置,与理论顶点距离为l
cg0
;cg1表示助推发动机耗尽时刻火箭质心所在位置,与理论顶点距离为l
cg1
。图2为助推与芯级发动机布局图,如图2所示,o1表示火箭质心,即火箭本体坐标系原点,x1、y1、z1分别为火箭本体系三正交坐标轴,o1x1沿箭体纵轴指向前,o1y1轴与o1x1垂直,在箭体纵向对称面内向上,o1z1轴由右手定则确定。其中,b0为芯级发动机,摆心理论值位于箭体纵轴x1上;b1,b2,b3为三个助推发动机,均匀分布在同心圆周上,圆心位于箭体纵轴x1上,b2理论摆心与火箭纵轴x1的垂线与y1轴平行;可见,箭体结构相对于x1o1z1平面不对称。设计助推与芯级发动机直径与总能量基本相当,使得结构具有通用性;但为保证火箭飞行持续具有稳定控制能力,设计芯级发动机装药额定工作时间t0,助推发动机装药额定工作时间t1,t1《t0,即助推发动机早于芯级发动机关机。
[0032]
由于三助推关机时间存在不同步情况,且推力下降阶段,控制力不可用,因此进入推力下降段助推推力将作为大干扰引入姿态控制系统,是本发明设计方案需要重点克服的问题。
[0033]
实施例一
[0034]
如图3所示,本发明实施例一提供一种助推与芯级发动机联合推力矢量控制方法,包括:
[0035]
步骤310、为火箭构型中三个助推和一个芯级发动机均配置两个伺服作动器双向摆动,提供俯仰、偏航和滚动通道控制力矩;
[0036]
在图2所示的发动机布局与作动器极性定义示意图中,每个发动机柔性喷管各配置a、b两个伺服作动器双向摆动,提供俯仰、偏航和滚动通道控制力矩,伺服机构配置上的冗余使系统具备一定的故障吸收能力;与分别为发动机b0作动器a、b对应摆角,与分别为发动机b1作动器a、b对应摆角,与分别为发动机b2作动器a、b对应摆角,与分别为发动机b3作动器a、b对应摆角;图中作动器位置实线箭头方向表示摆角正向。
[0037]
步骤320、基于姿态角偏差信号计算单个伺服作动器对俯仰、偏航或滚动通道的控制力矩贡献,构建伺服机构安装矩阵,根据伺服机构安装矩阵确定伺服机构分配矩阵,基于伺服机构分配矩阵进行摆角指令分配,实现三通道的执行分配解耦;
[0038]
设δ
ψ
、δ
γ
为基于姿态角偏差信号计算得到的俯仰、偏航、滚动三通道需求摆角,基于步骤310中的极性定义,单个伺服作动器对俯仰、偏航或滚动通道的控制力矩贡献为:
[0039][0040]
构建的伺服机构安装矩阵m为:
[0041][0042]
构建的伺服机构分配矩阵d为:
[0043][0044]
经验证,m
·
d=e3,e3为三阶单位矩阵,可知通过该设计可实现三通道的执行分配解耦。
[0045]
步骤330、当某一个或两个助推发动机到达推力下降段时,设置如下控制策略:对于尚未到达推力下降段助推,认为其控制力可操纵,使用该助推的推力矢量参与干扰力矩的配平;当助推即将进入后效段,认为其推力为不可用控制力,作为干扰力进行分析;
[0046]
具体地,可使用内压传感器进行推力下降段的精确辨识,结合延迟切换策略进行末段自适应增益调节,以最大限度发挥助推的控制作用。
[0047]
步骤340、基于设置的控制策略,考虑系统结构干扰、气动干扰及三助推关机不同步干扰,进行控制能力分析;
[0048]
具体地,设延迟关机的助推推力值为末秒推力为p
disturb
(由弹道特征可知,约为额定推力值10%),助推发动机喷管摆心至中轴线距离lb;1个或2个助推延迟关机且推力线与x1轴平行时干扰最大,易得两种情况下由关机不同步引起的合成干扰力矩的模相等,均为
设计助推工作时间略短于芯级,提高对多个固体助推发动机工作偏差的适应性;
[0049]
其中,关机不同步干扰状态设置如下:
①
干扰起始时刻:相应弹道助推关机时间;
②
干扰结束时刻:相应弹道芯级发动机关机时间;
[0050]
经仿真计算,静态配平摆角最大值分别为δ
n,0
(标称弹道),δ
μ,0
(上偏弹道),δ
d,0
(下偏弹道);如图1所示,在助推耗尽关机时刻附近,箭体质心由cg0迁移至cg1,如果基本完全抵消助推关机不同步干扰力矩,则所需助推推力线与箭体纵轴夹角约为β
cg
。本发明设计方案,综合考虑控制能力提高程度与方案可实现性,将助推安装角 耗尽后预置摆角设定为β0,β0<β
cg
,尽量减小干扰力臂。
[0051]
经仿真计算,助推安装角 耗尽后预置摆角设定为β0条件下,同等干扰,静态配平摆角最大值分别为δ
n,1
(标称弹道)、δ
μ,1
(上偏弹道)、δ
d,1
(下偏弹道),均约为方案改进前相应弹道配平摆角的1/3,控制能力提升较大且满足要求。
[0052]
本技术技术方案达到如下技术效果:
[0053]
(1)每个发动机柔性喷管各配置2个伺服作动器双向摆动,提供俯仰、偏航和滚动通道控制力矩,伺服机构配置上的冗余使系统具备一定的故障吸收能力;
[0054]
(2)实现了对4台发动机、8伺服联合控制系统的通道摆角指令正确有效分配;
[0055]
(3)对助推关机不同步处理策略,可最大程度发挥助推控制作用,提高控制效率;
[0056]
(4)将助推安装角 耗尽后预置摆角设定为β0,减小干扰力臂,进一步提高了系统控制能力;
[0057]
(5)综合上述设计,实现了对3助推 1芯级联合推力矢量的有效控制,使得相关发射任务最优配置方案可行,大幅提升运载效率及综合性能。
[0058]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的技术方案的基础之上,所做的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。