1.本实用新型涉及一种机械应急启泵装置,具体涉及一种新型机械应急启泵装置。
背景技术:
2.机械应急启泵装置,是一种常规启泵装置失效后,起到紧急启泵的作用,如在消防泵中,压力启动、远程启动和硬拉线启动都是通过继电器来实现自动启泵的,若继电器和弱电信号故障不能自动启动消防泵时,应依靠消防泵控制柜设置的“机械应急启泵装置”直接启动消防泵,避免因维修故障而浪费的时间,机械应急启泵装置包括传动机构、转动盘、转动臂及接触器,传动机构驱动转动盘旋转,转动盘上设置有偏心凸起,偏心凸起带动转动臂并驱动接触器启动。
3.接触器是一种电控制器件,是当输入量(激励量)的变化达到规定要求时,在电气输岀电路中使被控量发生预定的阶跃变化的一种电器,具有控制系统(又称输入回路)和被控制系统(又称输出回路)之间的互动关系,通常应用于自动化的控制电路中,是用小电流去控制大电流运作的一种“自动开关”,因而在电路中起着自动调节、安全保护、转换电路等作用。
4.目前,直接由偏心凸起带动转动臂转动,起到对接触器的启动作用,容易出现传动不稳定的情况,导致无法正常的对接触器进行启动,从而使得机械应急启泵装置失效,无法起到应急的作用,带来极大的危害。
技术实现要素:
5.针对现有技术存在的不足,本实用新型的目的在于提供一种传动稳定的新型机械应急启泵装置。
6.为实现上述目的,本实用新型提供了如下技术方案:包括外壳、传动机构、转动盘、转动臂及接触器,传动机构设置于外壳内,传动机构驱动转动盘旋转,转动盘上设置有偏心凸起,包括移动板,偏心凸起驱动移动板沿竖向移动,移动板上设置有推动凸起,转动臂具有与推动凸起相抵的下压段及铰接于外壳上的固定端,转动的固定端驱动接触器启动。
7.通过采用上述技术方案,利用移动板,将偏心凸起的转动转化为竖直方向上的移动,再由移动板上的推动凸起对转动臂进行推动,从而驱动接触器的启闭,而现有技术中直接由偏心凸起驱动转动臂的转动,以偏心凸起的转动驱动转动臂的转动,其运行并不稳定,而在偏心凸起与转动臂之间增设的移动板,将偏心凸起的转动先转化为竖向的移动,再由竖向的移动驱动转动臂的转动,运行过程更加稳定,由于本装置用于应急情况下,但凡出现故障将会造成严重的后果,故即使增加一定的成本也需要保证其平稳的运行。
8.本实用新型进一步设置为:所述的外壳上设置限位块,移动板上设置有沿竖向布置的竖向腰型槽且限位块沿竖向腰型槽移动,移动板上设置有横向布置的横向腰型孔,偏心凸起设置于横向腰型孔内并沿横向腰型孔横向移动,转动的转动盘构成移动板的竖向移动。
9.通过采用上述技术方案,竖向腰型孔与限位块使得移动板只能沿竖向移动,而转动的转动盘会带动偏心凸起转动,在偏心凸起沿横向腰型孔移动的同时带动移动板沿竖向移动,偏心凸起横向与竖向上的运动合成便为偏心凸起随转动盘的转动。
10.本实用新型进一步设置为:所述的传动机构包括主动杆、主动齿轮、从动齿轮及从动杆,主动杆驱动主动齿轮转动且主动齿轮与从动齿轮啮合传动,从动杆设置于从动齿轮上并与从动齿轮同步转动,转动盘相对偏心凸起的另一面设置有固定块,从动杆上设置有处于固定块转动轨迹上的推动块。
11.通过采用上述技术方案,需要使用本装置时,由主动杆驱动主动齿轮转动,并由从动齿轮带动从动杆的转动,从而使得推动块推动固定块转动,且保证从动杆与转动盘的处于同一圆心上,转动盘便随从动杆转动,达到对偏心凸起驱动的作用。
12.本实用新型进一步设置为:包括蓄能块及蓄能杆,外壳内设置有蓄能腔,蓄能块沿竖向移动设置于蓄能腔内,蓄能块与蓄能腔底部设置有蓄能弹簧,从动杆上设置有与蓄能杆铰接的铰接部,蓄能杆相较与铰接部铰接的另一端铰接于蓄能块,从动杆位于蓄能块中部正上方,固定块与偏心凸起位于转动盘两侧的相对位置,蓄能弹簧具有驱动状态及阻碍状态,阻碍状态为铰接部向最低处转动,蓄能弹簧阻碍从动杆的转动,驱动状态为铰接部由最低处向高处转动,蓄能弹簧推动从动杆的转动。
13.通过采用上述技术方案,当主动杆带动从杆转动时,推动块推动固定块转动,并带动转动盘转动,而在此过程中,由于铰接部向最低处移动,此时蓄能杆推动蓄能块向蓄能腔底部移动并压缩蓄能弹簧,此时蓄能弹簧阻碍从动杆的转动,偏心凸起向下转动,带动移动板向下移动,进而下压转动臂,当铰接部移动到最低处时,此时蓄能杆垂直于蓄能块,蓄能弹簧的形变程度最大,偏心凸起转动到转动盘最低处,转动臂转动程度达到最大,接触器闭合,而后当从动杆继续转动时,铰接部由从动杆最低处向上转动,此时蓄能弹簧为从动杆的转动提供助力,使得使用者在转动主动杆时更轻松,而增设多个固定块与推动块则能使得上述过程可重复运行。
14.本实用新型进一步设置为:所述的转动盘与接触器的数量为两个,转动盘分别设置于从动杆的两侧,接触器分别设置于外壳的两侧。
15.通过采用上述技术方案,由于是推动凸起沿竖向对转动臂进行驱动,无方向左右方向的分别,故在外壳两侧的接触器可进行随意调换,而常规技术中直接由偏心凸起对转动臂进行驱动,由于偏心凸起是转动的,故外壳两侧的接触器转动臂结构方向不同,使得左右不可调换,增加了标准化的难度。
附图说明
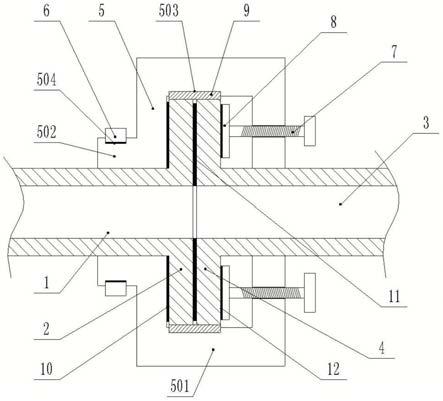
16.图1为本实用新型整体的结构示意图;
17.图2为本实用新型中除去一个接触器的整体的结构示意图;
18.图3为本实用新型中除去接触器的整体的爆炸图;
19.图4为本实用新型中蓄能腔及相关机构的结构示意图;
20.图5为本实用新型中转动盘及从动杆的结构示意图;
21.图6为本实用新型中转动臂的结构示意图。
具体实施方式
22.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
24.如图1-6所示,本实用新型公开了一种新型机械应急启泵装置,包括外壳1、传动机构2、转动盘4、转动臂5及接触器3,传动机构2设置于外壳1内,传动机构2驱动转动盘4旋转,转动盘4上设置有偏心凸起41,包括移动板6,偏心凸起41驱动移动板6沿竖向移动,移动板6上设置有推动凸起61,转动臂5具有与推动凸起61相抵的下压段51及铰接于外壳1上的固定端52,转动的固定端52驱动接触器3启动,利用移动板6,将偏心凸起41的转动转化为竖直方向上的移动,再由移动板6上的推动凸起61对转动臂5进行推动,从而驱动接触器3的启闭,而现有技术中直接由偏心凸起41驱动转动臂5的转动,以偏心凸起41的转动驱动转动臂5的转动,其运行并不稳定,而在偏心凸起41与转动臂5之间增设的移动板6,将偏心凸起41的转动先转化为竖向的移动,再由竖向的移动驱动转动臂5的转动,运行过程更加稳定,由于本装置用于应急情况下,但凡出现故障将会造成严重的后果,故即使增加一定的成本也需要保证其平稳的运行。
25.外壳1上设置限位块62,移动板6上设置有沿竖向布置的竖向腰型槽63且限位块62沿竖向腰型槽63移动,移动板6上设置有横向布置的横向腰型孔64,偏心凸起41设置于横向腰型孔64内并沿横向腰型孔64横向移动,转动的转动盘4构成移动板6的竖向移动,竖向腰型孔与限位块62使得移动板6只能沿竖向移动,而转动的转动盘4会带动偏心凸起41转动,在偏心凸起41沿横向腰型孔64移动的同时带动移动板6沿竖向移动,偏心凸起41横向与竖向上的运动合成便为偏心凸起41随转动盘4的转动。
26.传动机构2包括主动杆21、主动齿轮22、从动齿轮23及从动杆24,主动杆21驱动主动齿轮22转动且主动齿轮22与从动齿轮23啮合传动,从动杆24设置于从动齿轮23上并与从动齿轮23同步转动,转动盘4相对偏心凸起41的另一面设置有固定块42,从动杆24上设置有处于固定块42转动轨迹上的推动块25,需要使用本装置时,由主动杆21驱动主动齿轮22转动,并由从动齿轮23带动从动杆24的转动,从而使得推动块25推动固定块42转动,且保证从动杆24与转动盘4的处于同一圆心上,转动盘4便随从动杆24转动,达到对偏心凸起41驱动的作用。
27.包括蓄能块71及蓄能杆74,外壳1内设置有蓄能腔7,蓄能块71沿竖向移动设置于蓄能腔7内,蓄能块71与蓄能腔7底部设置有蓄能弹簧72,从动杆24上设置有与蓄能杆74铰接的铰接部73,蓄能杆74相较与铰接部73铰接的另一端铰接于蓄能块71,从动杆24位于蓄能块71中部正上方,固定块42与偏心凸起41位于转动盘4两侧的相对位置,蓄能弹簧72具有驱动状态及阻碍状态,阻碍状态为铰接部73向最低处转动,蓄能弹簧72阻碍从动杆24的转
动,驱动状态为铰接部73由最低处向高处转动,蓄能弹簧72推动从动杆24的转动,当主动杆21带动从杆转动时,推动块25推动固定块42转动,并带动转动盘4转动,而在此过程中,由于铰接部73向最低处移动,此时蓄能杆74推动蓄能块71向蓄能腔7底部移动并压缩蓄能弹簧72,此时蓄能弹簧72阻碍从动杆24的转动,偏心凸起41向下转动,带动移动板6向下移动,进而下压转动臂5,当铰接部73移动到最低处时,此时蓄能杆74垂直于蓄能块71,蓄能弹簧72的形变程度最大,偏心凸起41转动到转动盘4最低处,转动臂5转动程度达到最大,接触器3闭合,而后当从动杆24继续转动时,铰接部73由从动杆24最低处向上转动,此时蓄能弹簧72为从动杆24的转动提供助力,使得使用者在转动主动杆21时更轻松,而增设多个固定块42与推动块25则能使得上述过程可重复运行。
28.转动盘4与接触器3的数量为两个,转动盘4分别设置于从动杆24的两侧,接触器3分别设置于外壳1的两侧,由于是推动凸起61沿竖向对转动臂5进行驱动,无方向左右方向的分别,故在外壳1两侧的接触器3可进行随意调换,而常规技术中直接由偏心凸起41对转动臂5进行驱动,由于偏心凸起41是转动的,故外壳1两侧的接触器3转动臂5结构方向不同,使得左右不可调换,增加了标准化的难度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。