1.本技术涉及垃圾回收技术领域,具体涉及一种水下垃圾回收设备。
背景技术:
2.目前水下垃圾的回收方法大多是通过使用人工潜水,或是通过打捞的方式进行水下垃圾清理,然而通过人工潜水的方式进行水下垃圾清理,这对于潜水人员有极高的要求,而通过打捞的方式进行水下清理,对于水下生态存在一定的破坏性,且使用现有的水下垃圾回收方法进行水下垃圾的回收,由于无法准确识别水下垃圾或是识别水下垃圾的用时较长,导致水下垃圾的回收效率比较低。
技术实现要素:
3.有鉴于此,本技术提供一种水下垃圾回收设备,以解决在现有技术中,水下垃圾回收效率低的问题。
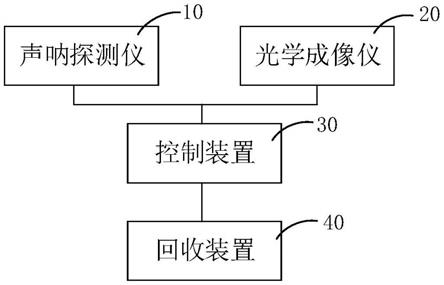
4.根据第一方面,本技术提供的一种水下垃圾回收设备,包括:声呐探测仪、光学成像仪、回收装置及控制装置,所述控制装置分别与所述声呐探测仪、所述光学成像仪及所述回收装置连接;所述声呐探测仪用于探测水下的声呐影像,向所述控制装置输出所述水下声呐图像;所述光学成像仪用于拍摄水下光学影像,向所述控制装置输出所述水下光学图像;所述回收装置用于进行水下垃圾回收;所述控制装置用于接收所述水下声呐图像和水下光学图像进行水下垃圾识别,输出控制信号控制所述回收装置进行水下垃圾回收。
5.结合第一方面,在第一方面的第一实施方式中,所述光学成像仪包括:光学镜头,在所述光学镜头的镜头表面设置有防水透气膜。
6.结合第一方面的第一实施方式,在第一方面的第二实施方式中,所述光学成像仪还包括:led灯,所述led灯靠近所述光学镜头设置。
7.结合第一方面,在第一方面的第三实施方式中,所述回收装置包括:垃圾回收箱和至少一个抓取组件,所述抓取组件与所述控制装置连接,所述抓取组件用于抓取所述控制装置识别的水下垃圾,将所述水下垃圾送入垃圾回收箱。
8.结合第一方面,在第一方面的第四实施方式中,包括:水下悬浮装置,所述水下悬浮装置与所述控制装置连接,所述水下悬浮装置用于带动所述声呐探测仪、光学成像仪、回收装置及控制装置进行水下悬浮。
9.结合第一方面的一些实施方式,在第一方面的第五实施方式中,控制装置包括:控制模块,所述控制模块分别与所述声呐探测仪、光学成像仪连接,所述控制模块用于接收所述水下声呐图像和水下光学图像进行水下垃圾识别,发送控制信号;
10.驱动模块,所述驱动模块分别与所述控制模块、所述回收装置,和/或,水下悬浮装置连接,所述驱动模块用于接收所述控制信号,控制所述回收装置回收水下垃圾,和/或,所述驱动模块用于驱动水下悬浮装置悬浮;所述控制装置、声呐探测仪、光学成像仪和回收装置固定在水下悬浮装置上。
11.结合第一方面的第五实施方式,在第一方面的第六实施方式中,所述驱动模块包括:输入单元、驱动单元及输出单元;所述输入单元的输入端与所述控制模块连接,所述输入单元的输出端与所述驱动单元的输入端连接,所述驱动单元的输出端与所述输出单元的输入端连接,所述输出单元的输出端与所述回收装置连接,或,水下悬浮装置连接。
12.结合第一方面,在第一方面的第七实施方式中,所述驱动单元包括:至少1个逻辑器,所述逻辑器的输入端与输入单元连接,所述逻辑器的输出端与驱动芯片的输入端连接,所述驱动芯片的输出端连接至少2个驱动电机的输入端,所述驱动电机的输出端与输出单元连接。
13.结合第一方面,在第一方面的第八实施方式中,所述驱动模块还包括:稳压单元,所述稳压单元与所述驱动单元连接;所述稳压单元用于稳定所述驱动单元的工作电压。
14.结合第一方面,在第一方面的第九实施方式中,还包括:电源模块,所述电源模块与所述声呐探测仪、光学成像仪、回收装置及控制装置,用于向所述声呐探测仪、光学成像仪、回收装置及控制装置提供电能。
15.上述水下垃圾回收设备,先通过声呐探测仪和光学成像仪获取水下图像,将其水下图像发送至控制装置,由控制装置对水下图像中的垃圾进行识别;其次根据所识别的水下垃圾生成控制信号,将控制信号发送至回收装置,回收装置对水下垃圾进行回收,从而利用电子设备进行水下垃圾的识别,及通过对所检测到的水下垃圾进行回收,进一步提高水下垃圾的回收效率。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本技术实施例提供的水下垃圾回收设备的结构框图;
18.图2是本技术可选实施例提供的水下垃圾回收设备的结构框图;
19.图3是本技术实施例提供的可选的水下垃圾回收设备中控制装置的结构框图。
20.图4是本技术实施例提供的可选的水下垃圾回收设备中驱动电路的示意图。
21.附图标记
22.声呐探测仪-10;光学成像仪-20;控制装置-30;回收装置-40;水下悬浮装置-50;控制模块-301;驱动模块;输入单元-302a;驱动单元-302b;输出单元-302c;稳压单元-302d;led灯-l1;驱动芯片-u1;第一电机-m1;第二电机-m2;稳压芯片-u2;电容-c1、c2。
具体实施方式
23.下面结合附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而非全部实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。在不冲突的情况下,下述各个实施例及其技术特征可以相互组合。
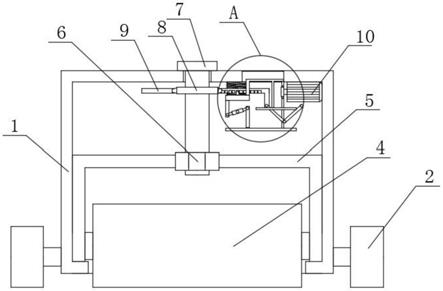
24.本实施例提供的一种水下垃圾回收设备,该水下垃圾回收设备可以设置在水底,
对预设范围内的水底垃圾进行回收,之后在通过定期进行设备回收,以此完成对水下垃圾的回收,例如:在直径为2米的水底范围进行水下垃圾回收。如图1所示,水下垃圾回收设备包括:声呐探测仪10、光学成像仪20、回收装置40及控制装置30,控制装置30分别与声呐探测仪10、光学成像仪20及回收装置40连接;声呐探测仪10用于探测水下的声呐影像,向控制装置30输出水下声呐图像;光学成像仪20用于拍摄水下光学影像,向控制装置30输出水下光学图像;回收装置40用于进行水下垃圾回收;控制装置30用于接收水下声呐图像和水下光学图像进行水下垃圾识别,输出控制信号控制回收装置进行水下垃圾回收。
25.本实施例提供的水下垃圾回收的设备,先通过声呐探测仪和光学成像仪获取水下图像,将其水下图像发送至控制装置,由控制装置对水下图像中的垃圾进行识别;其次根据所识别的水下垃圾生成控制信号,将控制信号发送至回收装置,回收装置对水下垃圾进行回收,从而利用电子设备进行水下垃圾的识别,及通过对所检测到的水下垃圾进行回收,进一步提高水下垃圾的回收效率。
26.可选的,声呐探测仪,声呐探测仪与控制装置连接,声呐探测仪用于探测水下的声呐影像,向控制装置输出水下声呐图像,在本实施例中,声呐探测仪所采集的声呐图像可以是使用侧扫声呐获得的声呐图像或使用前视声呐获得的声呐图像,利用声学图像可以进行水下地形、生物的探测,从而实现对水下垃圾的探测;光学成像仪,光学成像仪与控制装置连接,光学成像仪用于拍摄水下的光学影像,并向控制装置输出水下的光学图像。可选的,光学成像仪可以是水下摄像机,通过拍摄水下画面从而降低对水下目标分析难道,提高水下垃圾识别的准确性。
27.可选的,光学成像仪包括:光学镜头,而为了满足光学镜头能够在水下正常工作的要求,为此需要进行光学镜头表面贴附防水透气膜,以确保个光学镜头能够在水下正常工作,此外除光学镜头外,光学成像仪本身属于防水设备,从而充分满足水下工作的需求。例如:在进行水下作业时,由于光学成像仪在进行变焦的过程会产生空隙,有可能会产生渗水的情况,其对仪器的使用寿命产生影响,为此需要通过使用防水透气膜保证镜头在进行变焦的过程中密封性。
28.优选的,防水透气膜制作材料为聚四氟乙烯,由于聚四氟乙烯抗酸抗碱、抗有机溶剂的特点,可以满足水下拍摄的需求。
29.可选的,光学成像仪还包括:led灯,led灯靠近光学镜头设置;在水下拍摄光学图像时,由于水下光线暗淡,且如果是在水质浑浊的水域作业时,需要引入单独光源进行辅助照明,以保证在水下能够拍摄到清晰的水下画面。
30.可选的,回收装置包括:垃圾回收箱和至少一个抓取组件,抓取组件与控制装置连接,抓取组件用于抓取控制装置识别的水下垃圾,将水下垃圾送入垃圾回收箱。为了减轻设备自身重量,回收箱可以是网箱;抓取组件为夹取式机械手,其中,抓取组件还可以包括至少两个活动件和驱动电机,驱动电机带动活动件对水下垃圾进行夹取。
31.本实施例提供的一种水下垃圾回收设备,如图2所示,在上述实施例的基础上设置了水下悬浮装置50,水下悬浮装置50与控制装置30连接,当将水下垃圾回收设备置于水中使,首先该设备将漂浮于水面,之后水下悬浮装置启动,水下悬浮装置50将带动声呐探测仪10、光学成像仪20、回收装置40及控制装置30进行水下悬浮。
32.可选的,如图2-3所示,控制装置30包括:控制模块301,控制模块301与声呐探测
仪、光学成像仪连接,控制模块301用于接收所述水下声呐图像和水下光学图像进行水下垃圾识别,发送控制信号;驱动模块302,驱动模块302分别与控制模块301、回收装置,和/或,水下悬浮装置连接,驱动模块用302于接收控制信号,控制回收装置回收水下垃圾,和/或,驱动模块302用于驱动水下悬浮装置悬浮;控制装置、声呐探测仪、光学成像仪和回收装置固定在水下悬浮装置上。
33.在本实施例中,水下悬浮装置与控制装置连接,控制装置控制水下悬浮装置带动声呐探测仪、光学成像仪、回收装置进行水下悬浮,当悬浮到达预设位置后,声呐探测仪、光学成像仪对预设位置的环境情况进行确定,之后启动回收装置对预设位置中确定出的水下垃圾进行拾取,并将所拾取的垃圾送入垃圾回收箱内。
34.本实施例提供的水下垃圾回收设备,通过设置水下悬浮装置带动声呐探测仪、光学成像仪、回收装置及控制装置进行水下悬浮,当水下垃圾回收设备入水后,将下沉至预设位置处,之后水下悬浮装置开始工作,整体的水下垃圾回收设备将悬浮于预设位置处,之后声呐探测仪、光学成像仪进行工作,对水域地形、生物以及垃圾进行探测,当发现回收设备周围有垃圾存在时,控制装置控制回收装置动作对水下垃圾进行回收,从而实现水下垃圾回收设备能够自主探测水域中的垃圾,并对水域中的垃圾进行拾取,从而提高水下垃圾的拾取效率。
35.可选的,如图3所示,驱动模块302还可以是驱动单元包括:输入单元302a、驱动单元302b及输出单元302c;输入单元302a的输入端与控制模块连接,输入单元302a的输出端与驱动单元302b的输入端连接,驱动单元302b的输出端与输出单元302b的输入端连接,输出单元302c的输出端与回收装置连接,或,水下悬浮装置连接。其中,驱动单元302b可以是至少1个逻辑器,逻辑器的输入端与输入单元连接,逻辑器的输出端与驱动芯片的输入端连接,驱动芯片的输出端连接至少2个驱动电机的输入端,驱动电机的输出端与输出单元连接。
36.可选的,如图3所示,稳压单元302d,稳压单元302b与驱动单元连接;稳压单元用于稳定驱动单元的工作电压。稳压单元可以稳压芯片。
37.具体的,驱动模块还可以是:驱动电路,例如:该电路可以由电机驱动芯片连接至少2个电机,其中两个电机还可以与机械手或是负责悬浮的悬浮装置连接,控制器悬浮装置在水下进行悬浮。又例如:如图4所示,驱动电路包括:驱动芯片u1,第一电机m1,第二电机m2,而为了保证能够直观观测到驱动电路的模式变换,可以在驱动芯片的信号控制端对应连接led灯l1作为提示,而为了能够保证驱动电路工作正常可以在驱动芯片的电源端连接稳压芯片u2,另外为了防止电流变化使其电机烧坏,可以在第一电机m1和第二电机m2之间连接电容c1和c2。其中控制信号由in1-in4输入,从out1-out4输出至第一电机m1和第二电机m2,使其电机动作。
38.可选的,本实施例还包括:电源模块分别与声呐探测仪、光学成像仪、回收装置及控制装置连接,用于向声呐探测仪、光学成像仪、回收装置及控制装置提供电能。
39.本实施例提供的一种水下垃圾回收设备,将该设备将定期投入预设水域中,首先声呐探测仪和光学成像仪对探测范围的水域进行图像采集,之后将所采集到的图像发送至控制装置,控制装置从所获得的图像中分析得到所探测水域中水下垃圾的具体位置,之后控制装置将水下垃圾的具体位置转换为电信号控制回收装置中的抓取组件对水下垃圾进
行抓取,并将放入垃圾回收箱中,从而完成自动拾取水下垃圾,从而提高水下垃圾提取的效率。
40.在以上描述中,为了解释的目的而列出了各个细节。应当明白的是,本领域普通技术人员可以认识到,在不使用这些特定细节的情况下也可以实现本技术。在其它实施例中,不会对公知的结构和过程进行详细阐述,以避免不必要的细节使本技术的描述变得晦涩。因此,本技术并非旨在限于所示的实施例,而是与符合本技术所公开的原理和特征的最广范围相一致。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。