1.本发明涉及机器人领域,尤其涉及偏航机器人支撑座及旋转臂配合定位控制系统。
背景技术:
2.随着科技的发展,风电技术中的低风速大兆瓦级风机的不断创新,实现风机的直径也在逐渐增大,使与风机塔筒联接的偏航轴承直径也随之增大,由于一个偏航轴承需要利用较多的螺栓进行紧固,为了保证装配效率较高,一般会使用到风力发电机偏航系统机器人装配平台辅助对偏航轴承进行自动装配。
3.风力发电机偏航系统机器人装配平台对偏航轴承进行装配时,需要保证偏航机器人支撑座与旋转臂之间的配合定位足够精准,才能确保关节机器人精确的对偏航轴承上的多组螺栓进行紧固,若在进行装配时,偏航机器人支撑座与旋转臂之间的角度调整出现误差,则会直接导致旋转臂一端的关节机器人活动范围存在误差,而驱动主电机每次停转后仍可能由于惯性存在一定的偏差移动。
4.因此,有必要提供一种新的偏航机器人支撑座及旋转臂配合定位控制系统解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本发明提供偏航机器人支撑座及旋转臂配合定位控制系统。
6.本发明提供的偏航机器人支撑座及旋转臂配合定位控制系统包括:支撑座,所述支撑座上安装连接有用于驱动转动轴的驱动主电机,所述支撑座的上端设有旋转臂,所述旋转臂的一端与转动轴固定连接,所述旋转臂的另一端安装连接有关节机器人,所述支撑座上安装连接有处理器。
7.优选的,所述处理器的外壁上设有预定位机构,所述预定位机构包括固定管,所述固定管与处理器的外壁固定连接,所述固定管上滑动连接有拉杆,所述拉杆上套有第一弹簧,所述第一弹簧的一端与拉杆相连接,所述第一弹簧的另一端与固定管的外壁相连接,所述拉杆的下端固定连接有橡胶塞,所述橡胶塞设于固定管内部,所述固定管的内部设有触发组件,所述固定管上设有进气管口,所述进气管口的管内壁上固定连接有单向阀,所述固定管上设有细径排气管。
8.优选的,所述触发组件包括触环,所述触环与橡胶塞固定连接,所述固定管的内壁上安装连接有触条。
9.优选的,所述固定管的外壁上固定连接有刻度条杆,所述拉杆的上端设有横拉把,所述横拉把与刻度条杆相抵。
10.优选的,所述支撑座与转动轴之间设有自动锁止机构。
11.优选的,所述自动锁止机构包括气泵,所述气泵固定安装于支撑座的内壁上,所述
支撑座的内壁上设有两个安装架,两个所述安装架之间固定连接有环形管,所述环形管的内部设有移动调位组件,所述转动轴的下端安装连接有电光棒,所述转动轴上固定连接有齿轮环,所述支撑座的内壁上固定连接有两个液压缸,两个所述液压缸相对的一端均固定连接有齿条板,两个所述齿条板分别设于齿轮环的两端。
12.优选的,所述移动调位组件包括三通管口,所述三通管口的第一管口与环形管固定连接,所述三通管口的第二管口通过连接软管与气泵的出气端相连接,所述三通管口的第三管口处安装连接有电磁阀,所述环形管的管内设于磁内芯滑塞,所述环形管的内圈管壁上设有限位环槽,所述限位环槽上滑动连接有磁板,所述磁板上固定连接有光传感器,所述环形管的管内设有第二弹簧,所述第二弹簧的一端与环形管的管壁相连接,所述第二弹簧的另一端与磁内芯滑塞相连接。
13.优选的,所述磁内芯滑塞包括弧形磁块,所述弧形磁块的外部包有橡胶外套皮。
14.优选的,所述弧形磁块与磁板的磁极相反。
15.优选的,控制处理模块、触发锁定模块、复位解锁模块,所述控制处理模块连接触发锁定模块与复位解锁模块,所述控制处理模块用于控制驱动主电机与处理器工作,所述定位预设模块用于控制环形管管内的气体存量,所述触发锁定模块用于反馈数据到控制处理模块并触发两个液压缸,所述复位解锁模块用于反馈数据到控制处理模块并控制电磁阀开启;具体步骤如下:步骤一:拉动拉杆移动至预设位置处松开,橡胶塞上的触环移动至与触条相接触时,即构成一个电通路,使气泵工作,环形管内部的气压增大使磁板带动光传感器移动至预设角度位置;步骤二:处理器控制驱动主电机工作,使旋转臂一端的关节机器人转动至装配平台区域内,转动轴下端的电光棒也移动至与光传感器相近,光传感器反馈信息给处理器,使两个液压缸同时工作,实现两个液压缸一端的齿条板移动至与齿轮环相啮合;步骤三:处理器发出信号使电磁阀开启,环形管内部的空气排出,使光传感器与电光棒相错位,此时处理器控制两个液压缸一端的齿条板均与齿轮环相分离,即可实现自动解锁。
16.值得注意的是:a、步骤一中,拉杆滑动上移的高度位置等同于固定管内部的气体经过细径排气管排出时间的长短,决定气泵的工作时长。
17.b、步骤二中,环形管内部的气压增大,使磁内芯滑塞在环形管的管内滑动,可以带动磁板移动调整光传感器至预设角度位置;c、步骤三中,当电磁阀开启的时间,足够环形管内部的空气完全排出。
18.与相关技术相比较,本发明提供的偏航机器人支撑座及旋转臂配合定位控制系统具有如下有益效果:1、本发明提供偏航机器人支撑座及旋转臂配合定位控制系统,通过拉杆下端的橡胶塞在固定管的内部滑动并复位,使气泵工作对环形管内部进行注气,即可调整光传感器至预设角度位置,当关节机器人转动至预设定位的角度时,两个齿条板移动至与齿轮环相啮合,能够很好的阻止转动轴继续转动,从而保证旋转臂旋转角度定位准确;
2、本发明提供偏航机器人支撑座及旋转臂配合定位控制系统,通过处理器发出信号使电磁阀开启,环形管内的空气排出使光传感器与电光棒相错位,即可使两个液压缸一端的齿条板均与齿轮环相分离,即可实现自动解锁,保证关节机器人反向转动复位工作能够顺利进行。
附图说明
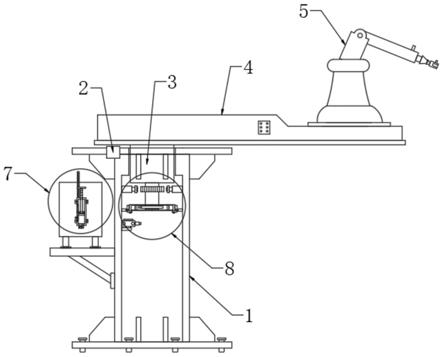
19.图1为本发明提供的偏航机器人支撑座及旋转臂配合定位控制系统的一种较佳实施例的结构示意图;图2为图1所示的预定位机构的结构示意图;图3为图1所示的自动锁止机构的结构示意图;图4为本发明提供的偏航机器人支撑座及旋转臂配合定位控制系统的环形管的结构示意图;图5为本发明的系统原理框图。
20.图中标号:1、支撑座;2、驱动主电机;3、转动轴;4、旋转臂;5、关节机器人;6、处理器;7、预定位机构;71、固定管;72、拉杆;73、第一弹簧;74、橡胶塞;75、触环;76、刻度条杆;77、触条;78、单向阀;8、自动锁止机构;81、气泵;82、环形管;821、三通管口;822、电磁阀;823、磁内芯滑塞;824、磁板;825、光传感器;826、第二弹簧;83、电光棒;84、齿轮环;85、液压缸;86、齿条板。
具体实施方式
21.下面结合附图和实施方式对本发明作进一步说明。
22.请结合参阅图1至图5,偏航机器人支撑座及旋转臂配合定位控制系统包括:支撑座1,支撑座1上安装连接有用于驱动转动轴3的驱动主电机2,支撑座1的上端设有旋转臂4,旋转臂4的一端与转动轴3固定连接,旋转臂4的另一端安装连接有关节机器人5,支撑座1上安装连接有处理器6。
23.在具体实施过程中,如图1和图2所示,处理器6的外壁上设有预定位机构7,预定位机构7包括固定管71,固定管71与处理器6的外壁固定连接,固定管71上滑动连接有拉杆72,拉杆72上套有第一弹簧73,第一弹簧73的一端与拉杆72相连接,第一弹簧73的另一端与固定管71的外壁相连接,拉杆72的下端固定连接有橡胶塞74,橡胶塞74设于固定管71内部,固定管71的内部设有触发组件,固定管71上设有进气管口,进气管口的管内壁上固定连接有单向阀78,固定管71上设有细径排气管。
24.需要说明的是:根据支撑座1上关节机器人5的与代加工的偏航轴承之间的角度,拉动拉杆72一端的横拉把,使其移动至刻度条杆76上的预设位置处,橡胶塞74在固定管71的内部滑动,固定管71的内部负压增大,使空气自动进入固定管71内;松开拉杆72一端的横拉把后,第一弹簧73恢复弹性形变,使橡胶塞74也在固定管71的内部反向滑动,使固定管71的内部的空气经过细径排气管缓慢排出,即可控制气泵81的工作时间长短。
25.参考图2所示,触发组件包括触环75,触环75与橡胶塞74固定连接,固定管71的内壁上安装连接有触条77。
26.需要说明的是:当橡胶塞74上的触环75移动至与触条77相接触时,即构成一个电通路,使气泵81工作;即触环75、触条77、气泵81与外接电路之间的电通路。
27.参考图2所示,固定管71的外壁上固定连接有刻度条杆76,拉杆72的上端设有横拉把,横拉把与刻度条杆76相抵。
28.需要说明的是:观察刻度条杆76,可以实现精确控制固定管71内部的排气时间。
29.参考图1和图3所示,支撑座1与转动轴3之间设有自动锁止机构8;自动锁止机构8包括气泵81,气泵81固定安装于支撑座1的内壁上,支撑座1的内壁上设有两个安装架,两个安装架之间固定连接有环形管82,环形管82的内部设有移动调位组件,转动轴3的下端安装连接有电光棒83,转动轴3上固定连接有齿轮环84,支撑座1的内壁上固定连接有两个液压缸85,两个液压缸85相对的一端均固定连接有齿条板86,两个齿条板86分别设于齿轮环84的两端。
30.需要说明的是:气泵81工作,环形管82内部的气压增大,可以调整光传感器825至预设角度位置,即可实现预先角度定位;光传感器825接触信息后传递给处理器6,使两个液压缸85同时工作,即可实现两个液压缸85一端的齿条板86移动至与齿轮环84相啮合,此时能够很好的阻止转动轴3继续转动。
31.参考图3和图4所示,移动调位组件包括三通管口821,三通管口821的第一管口与环形管82固定连接,三通管口821的第二管口通过连接软管与气泵81的出气端相连接,三通管口821的第三管口处安装连接有电磁阀822,环形管82的管内设于磁内芯滑塞823,环形管82的内圈管壁上设有限位环槽,限位环槽上滑动连接有磁板824,磁板824上固定连接有光传感器825,环形管82的管内设有第二弹簧826,第二弹簧826的一端与环形管82的管壁相连接,第二弹簧826的另一端与磁内芯滑塞823相连接;磁内芯滑塞823包括弧形磁块,弧形磁块的外部包有橡胶外套皮;弧形磁块与磁板824的磁极相反。
32.需要说明的是:环形管82内部的气压增大,使磁内芯滑塞823在环形管82的管内滑动,并带动第二弹簧826发生弹性形变,固定管71的不同排气时间会使气泵81的工作时间越长,即可实现磁内芯滑塞823滑动的角度越大,磁内芯滑塞823带动磁板824同时移动,调整光传感器825至预设角度位置;电光棒83也移动至与光传感器825相近,此时光传感器825反馈信息给处理器6,即可使两个液压缸85同时工作。
33.偏航机器人支撑座及旋转臂配合定位控制系统,包括:控制处理模块、触发锁定模块、复位解锁模块,控制处理模块连接触发锁定模块与复位解锁模块,控制处理模块用于控制驱动主电机2与处理器6工作,定位预设模块用于控制环形管82管内的气体存量,触发锁定模块用于反馈数据到控制处理模块并触发两个液压缸85,复位解锁模块用于反馈数据到控制处理模块并控制电磁阀822开启;具体步骤如下:步骤一:拉动拉杆72移动至预设位置处松开,橡胶塞74上的触环75移动至与触条77相接触时,即构成一个电通路,使气泵81工作,环形管82内部的气压增大使磁板824带动光传感器825移动至预设角度位置;
步骤二:处理器6控制驱动主电机2工作,使旋转臂4一端的关节机器人5转动至装配平台区域内,转动轴3下端的电光棒83也移动至与光传感器825相近,光传感器825反馈信息给处理器6,使两个液压缸85同时工作,实现两个液压缸85一端的齿条板86移动至与齿轮环84相啮合;步骤三:处理器6发出信号使电磁阀822开启,环形管82内部的空气排出,使光传感器825与电光棒83相错位,此时处理器6控制两个液压缸85一端的齿条板86均与齿轮环84相分离,即可实现自动解锁。
34.值得注意的是:a、步骤一中,拉杆72滑动上移的高度位置等同于固定管71内部的气体经过细径排气管排出时间的长短,决定气泵81的工作时长。
35.b、步骤二中,环形管82内部的气压增大,使磁内芯滑塞823在环形管82的管内滑动,可以带动磁板824移动调整光传感器825至预设角度位置;c、步骤三中,当电磁阀822开启的时间,足够环形管82内部的空气完全排出。
36.本发明提供的偏航机器人支撑座及旋转臂配合定位控制系统的工作原理如下:根据支撑座1上关节机器人5的与代加工的偏航轴承之间的角度,拉动拉杆72一端的横拉把,使其移动至刻度条杆76上的预设位置处,拉杆72相对于固定管71滑动,拉杆72下端的橡胶塞74也在固定管71的内部滑动,第一弹簧73发生弹性形变,当橡胶塞74滑动远离固定管71上的单向阀78时,固定管71的内部负压增大,使空气自动进入固定管71内;松开拉杆72一端的横拉把后,第一弹簧73恢复弹性形变,使橡胶塞74也在固定管71的内部反向滑动,使固定管71的内部的空气经过细径排气管缓慢排出。
37.在固定管71进行排气的过程,当橡胶塞74上的触环75移动至与触条77相接触时,即构成一个电通路,使气泵81工作,环形管82内部的气压增大,使磁内芯滑塞823在环形管82的管内滑动,并带动第二弹簧826发生弹性形变,固定管71的不同排气时间会使气泵81的工作时间越长,即可实现磁内芯滑塞823滑动的角度越大,磁内芯滑塞823带动磁板824同时移动,调整光传感器825至预设角度位置,即可实现预先角度定位。
38.利用处理器6控制驱动主电机2工作,使转动轴3带动旋转臂4一端的关节机器人5相对转动至装配平台区域内,此时转动轴3下端的电光棒83随同其同时转动,当关节机器人5相对转动至定位的角度时,此时电光棒83也移动至与光传感器825相近,此时光传感器825反馈信息给处理器6,使两个液压缸85同时工作,即可实现两个液压缸85一端的齿条板86移动至与齿轮环84相啮合,此时能够很好的阻止转动轴3继续转动,确保旋转臂4一端的关节机器人5恰好停留在预定位置处,即可保证关节机器人5精确装配加工。
39.当加工完成后,此时处理器6发出信号使电磁阀822开启,此时环形管82内部的空气经过电磁阀822排出,第二弹簧826恢复形变,即可使磁内芯滑塞823带动磁板824上的光传感器825反向移动,当电磁阀822开启一段时间后,环形管82内部的空气完全排出,且电磁阀822自动关闭,而光传感器825与电光棒83相错位,此时处理器6控制两个液压缸85工作反向复位,即可使两个液压缸85一端的齿条板86均与齿轮环84相分离,即可实现自动解锁,后启动驱动主电机2工作,使转动轴3带动旋转臂4一端的关节机器人5反向转动复位至初始位置处,使装配工作完全结束。
40.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发
明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。