技术特征:
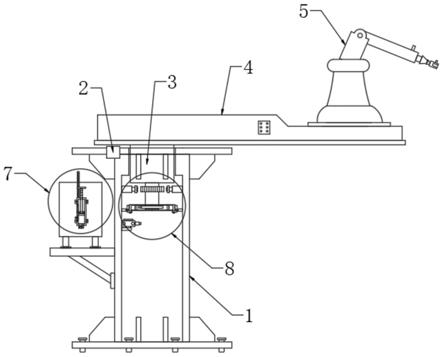
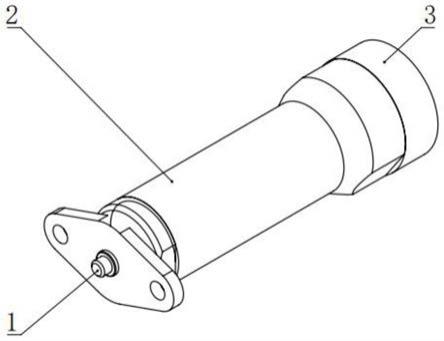
1.偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,包括:支撑座(1),所述支撑座(1)上安装连接有用于驱动转动轴(3)的驱动主电机(2),所述支撑座(1)的上端设有旋转臂(4),所述旋转臂(4)的一端与转动轴(3)固定连接,所述旋转臂(4)的另一端安装连接有关节机器人(5),所述支撑座(1)上安装连接有处理器(6)。2.根据权利要求1所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述处理器(6)的外壁上设有预定位机构(7),所述预定位机构(7)包括固定管(71),所述固定管(71)与处理器(6)的外壁固定连接,所述固定管(71)上滑动连接有拉杆(72),所述拉杆(72)上套有第一弹簧(73),所述第一弹簧(73)的一端与拉杆(72)相连接,所述第一弹簧(73)的另一端与固定管(71)的外壁相连接,所述拉杆(72)的下端固定连接有橡胶塞(74),所述橡胶塞(74)设于固定管(71)内部,所述固定管(71)的内部设有触发组件,所述固定管(71)上设有进气管口,所述进气管口的管内壁上固定连接有单向阀(78),所述固定管(71)上设有细径排气管。3.根据权利要求2所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述触发组件包括触环(75),所述触环(75)与橡胶塞(74)固定连接,所述固定管(71)的内壁上安装连接有触条(77)。4.根据权利要求2所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述固定管(71)的外壁上固定连接有刻度条杆(76),所述拉杆(72)的上端设有横拉把,所述横拉把与刻度条杆(76)相抵。5.根据权利要求1所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述支撑座(1)与转动轴(3)之间设有自动锁止机构(8)。6.根据权利要求5所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述自动锁止机构(8)包括气泵(81),所述气泵(81)固定安装于支撑座(1)的内壁上,所述支撑座(1)的内壁上设有两个安装架,两个所述安装架之间固定连接有环形管(82),所述环形管(82)的内部设有移动调位组件,所述转动轴(3)的下端安装连接有电光棒(83),所述转动轴(3)上固定连接有齿轮环(84),所述支撑座(1)的内壁上固定连接有两个液压缸(85),两个所述液压缸(85)相对的一端均固定连接有齿条板(86),两个所述齿条板(86)分别设于齿轮环(84)的两端。7.根据权利要求6所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述移动调位组件包括三通管口(821),所述三通管口(821)的第一管口与环形管(82)固定连接,所述三通管口(821)的第二管口通过连接软管与气泵(81)的出气端相连接,所述三通管口(821)的第三管口处安装连接有电磁阀(822),所述环形管(82)的管内设于磁内芯滑塞(823),所述环形管(82)的内圈管壁上设有限位环槽,所述限位环槽上滑动连接有磁板(824),所述磁板(824)上固定连接有光传感器(825),所述环形管(82)的管内设有第二弹簧(826),所述第二弹簧(826)的一端与环形管(82)的管壁相连接,所述第二弹簧(826)的另一端与磁内芯滑塞(823)相连接。8.根据权利要求7所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述磁内芯滑塞(823)包括弧形磁块,所述弧形磁块的外部包有橡胶外套皮。9.根据权利要求8所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,所述弧形磁块与磁板(824)的磁极相反。
10.根据权利要求1-9所述的偏航机器人支撑座及旋转臂配合定位控制系统,其特征在于,还包括:控制处理模块、触发锁定模块、复位解锁模块,所述控制处理模块连接触发锁定模块与复位解锁模块,所述控制处理模块用于控制驱动主电机(2)与处理器(6)工作,所述定位预设模块用于控制环形管(82)管内的气体存量,所述触发锁定模块用于反馈数据到控制处理模块并触发两个液压缸(85),所述复位解锁模块用于反馈数据到控制处理模块并控制电磁阀(822)开启;具体步骤如下:步骤一:拉动拉杆(72)移动至预设位置处松开,橡胶塞(74)上的触环(75)移动至与触条(77)相接触时,即构成一个电通路,使气泵(81)工作,环形管(82)内部的气压增大使磁板(824)带动光传感器(825)移动至预设角度位置;步骤二:处理器(6)控制驱动主电机(2)工作,使旋转臂(4)一端的关节机器人(5)转动至装配平台区域内,转动轴(3)下端的电光棒(83)也移动至与光传感器(825)相近,光传感器(825)反馈信息给处理器(6),使两个液压缸(85)同时工作,实现两个液压缸(85)一端的齿条板(86)移动至与齿轮环(84)相啮合;步骤三:处理器(6)发出信号使电磁阀(822)开启,环形管(82)内部的空气排出,使光传感器(825)与电光棒(83)相错位,此时处理器(6)控制两个液压缸(85)一端的齿条板(86)均与齿轮环(84)相分离,即可实现自动解锁。
技术总结
本发明提供一种偏航机器人支撑座及旋转臂配合定位控制系统,涉及机器人领域。所述偏航机器人支撑座及旋转臂配合定位控制系统包括支撑座,所述旋转臂的另一端安装连接有关节机器人,所述支撑座上安装连接有处理器。本发明提供的偏航机器人支撑座及旋转臂配合定位控制系统通过橡胶塞在固定管的内部滑动并复位,使气泵工作对环形管内部进行注气,调整光传感器至预设角度位置,当关节机器人转动至预设定位的角度时,两个齿条板与齿轮环相啮合,能够很好的阻止转动轴继续转动;通过处理器发出信号使电磁阀开启,光传感器与电光棒相错位,即可使两个齿条板均与齿轮环相分离,即可实现自动解锁,保证装配后的复位工作能够顺利进行。进行。进行。
技术研发人员:史伟 卜康涛 武静 卞伦伟 王璐 樊昌帅
受保护的技术使用者:国能联合动力技术(连云港)有限公司
技术研发日:2022.02.21
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。