手持式手术器械
1.相关申请的交叉引用
2.本技术要求2020年9月29日提交的美国临时专利申请第63/084,656号的权益和优先权,所述美国临时专利申请的全部公开内容以引用的方式并入本文中。
背景技术:
3.许多手柄组件制造商已开发具有用于操作和/或操控机电手术器械的专属驱动系统的产品线。在许多情况下,机电手术器械包括可重复使用的手柄组件,以及一次性装载单元和/或单次使用的装载单元,例如手术末端执行器,其在使用前选择性地连接到手柄组件并且然后在使用之后从手柄组件断开以便弃置或在一些情况下进行灭菌以供重复使用。
技术实现要素:
4.在本公开的一个方面,提供一种手持式手术器械,并且其包括其中限定腔的手柄壳体、被配置成相对于手柄壳体向远侧延伸的细长轴部分、被配置成联接到轴部分的远端部分并且被配置成相对于轴部分铰接的手术末端执行器、击发轴、铰接螺杆和铰接螺母。击发轴具有被配置成可驱动地联接到驱动器的近端部分和被配置成可操作地联接到手术末端执行器的从动元件的远端部分。铰接螺杆可操作地联接到手术末端执行器,并且铰接螺母围绕铰接螺杆设置并且可操作地联接到所述铰接螺杆。铰接螺杆被配置成响应于铰接螺母的旋转而平移,由此铰接螺杆在相对于轴部分的平行定向与相对于轴部分的非平行定向之间铰接手术末端执行器。
5.在各方面中,铰接螺母可被轴向限制到手柄壳体并且由手柄壳体可旋转地支撑。铰接螺杆可容纳在铰接螺母内。
6.在各方面中,铰接螺母可螺纹地联接到铰接螺杆的外表面,使得铰接螺母在第一旋转方向上的旋转向远侧或向近侧平移铰接螺杆。铰接螺母在第二相反的旋转方向上的旋转以向远侧或向近侧中的另一个平移铰接螺杆。
7.在各方面中,铰接螺杆和铰接螺母中的每一个可具有管状配置。
8.在各方面中,铰接螺杆和铰接螺母可同心地围绕击发轴设置。
9.在各方面中,手持式手术器械可另外包括铰接旋钮,其围绕铰接螺母设置并且可旋转地固定到铰接螺母,使得铰接旋钮的手动旋转可使铰接螺母旋转。
10.在各方面中,铰接旋钮可与铰接螺母连接或一体地形成。
11.在各方面中,手持式手术器械可另外包括具有轴向固定到铰接螺杆的近端部分的铰接连杆。铰接连杆可具有被配置成可操作地联接到手术末端执行器的远端部分。
12.在各方面中,铰接连杆可具有从其近端部分侧向地向外延伸的销。销可固定到铰接螺杆的远端部分。
13.在各方面中,手持式手术器械可另外包括击发螺母,其螺纹地联接到击发螺杆并且被配置成响应于击发螺杆的旋转而平移,以实现手术末端执行器的钉合功能。
14.在各方面中,手持式手术器械可另外包括延伸穿过轴部分的击发杆。击发杆可具
有固定到击发螺母的近端部分和联接到手术末端执行器的从动元件的远端部分。
15.在各方面中,手持式手术器械可另外包括轴向限制到手柄壳体的管壳体。击发螺母可设置在管壳体内并且键接到所述管壳体,以抵抗击发螺母与管壳体之间的相对旋转。
16.在各方面中,手持式手术器械可另外包括器械模块,其被配置成用于容纳在手柄壳体的腔中。器械模块可包括马达和驱动器。驱动器可以可操作地联接到马达并且被配置成可操作地联接到击发轴的近端部分,使得驱动器的旋转引起击发轴的旋转。
17.在各方面中,手持式手术器械可另外包括联接到手柄壳体的按钮和印刷电路板。按钮可与印刷电路板相关联,使得按钮的致动激活马达。
18.根据本公开的另外的方面,提供一种手持式手术器械的一次性手柄组件,并且其包括细长手柄壳体,在其中限定腔;铰接螺母,其由手柄壳体的远端部分可旋转地支撑;铰接螺杆,其容纳在铰接螺母内并且螺纹地联接到铰接螺母;和铰接旋钮,其围绕铰接螺母设置并且可旋转地固定到铰接螺母,使得铰接旋钮的手动旋转使铰接螺母旋转以相对于铰接螺母平移铰接螺杆。
19.在各方面中,铰接螺杆可限定穿过其中的细长通道。
20.在各方面中,一次性手柄组件可另外包括铰接连杆,其具有设置在通道内并且轴向固定到铰接螺杆的近端部分。
21.在各方面中,铰接连杆可具有从其近端部分侧向地向外延伸的销。销可固定到铰接螺杆的远端部分。
22.在各方面中,一次性手柄组件可另外包括击发轴,其具有容纳在手柄壳体的腔中的近端部分。铰接螺杆和铰接螺母可同心地围绕击发轴设置。
23.在各方面中,铰接旋钮可与铰接螺母连接或一体地形成。
24.如本文所用,术语平行和垂直被理解为包括基本上平行和基本上垂直的相对配置,其与真正的平行和真正的垂直相差约 或-10度。
附图说明
25.在本文中参考附图描述本公开的实施例,其中:
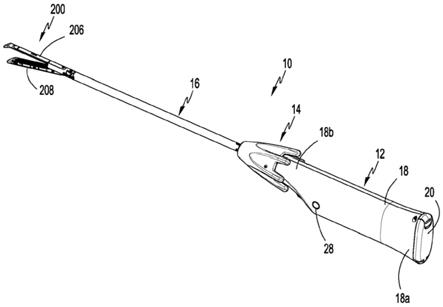
26.图1a为说明包括手柄组件、联接到手柄组件的轴部分和联接到轴部分的手术末端执行器的手持式机电手术器械的侧面透视图;
27.图1b为说明图1a的手持式机电手术器械的侧面透视图,其中所示的动力组件与手柄组件分离;
28.图2为说明图1a的手术器械的零件分离的透视图;
29.图3为说明图1a的包括铰接旋钮、击发轴和pcb连接的手术器械的部件的放大透视图;
30.图4为图1a的手术器械的纵向横截面视图;和
31.图5为图1a的包括手动操作的铰接组件和设置在铰接组件内的马达供电的击发组件的手术器械的纵向横截面视图。
具体实施方式
32.参考图式详细地描述本发明所公开的包括其手柄组件的手术器械的实施例,在图
式中,相似参考标号在各图中的每一个中表示相同或对应元件。如本文所用,术语“远侧”指代手术器械或其部件的较远离使用者的部分,而术语“近侧”指代手术器械或其部件的较接近使用者的部分。
33.如以下将详细描述的,提供一种具有以下的手持式手术器械的手柄组件:符合人体工程学的一次性手柄壳体、可重复使用的动力组件(例如,容纳在无菌或非无菌外壳内的器械模块)、从手柄壳体向远侧延伸的轴部分和可枢转地联接到轴部分的远端的手术末端执行器。预期除动力组件之外,手术器械的所有部件都是一次性的。
34.手术器械具有设置在手柄壳体与轴部分之间并且被配置成相对于其旋转的手动铰接旋钮。铰接旋钮可旋转地围绕螺纹地联接到铰接螺杆的铰接螺母固定。铰接螺杆支撑可轴向平移的铰接连杆,其可操作地联接到手术末端执行器,以响应于铰接旋钮的手动旋转而相对于轴部分铰接手术末端执行器。被配置成实现手术末端执行器的打开/关闭和钉合功能的击发组件同轴地延伸穿过铰接组件并且由动力组件致动。下文另外详述所公开的手术器械的其它特征和益处。
35.参考图1a、1b、2和3,根据本公开的实施例的手术器械一般表示为10,并且呈用于致动和操控手术末端执行器200的动力手持式机电手术器械的形式。手持式机电手术器械10包括手柄组件12、联接到手柄组件12的铰接旋钮壳体14,和从铰接旋钮壳体14向远侧延伸并且具有附接到其上的末端执行器200的轴部分16。
36.手柄组件12包括一次性并且无菌的细长手柄壳体18和可枢转地联接到手柄壳体18的近端部分18a的铰链门20。门20被选择性地打开和关闭,以允许插入或移除非无菌的可重复使用的器械模块或动力组件22。手柄壳体18和门20各自具有内周,当关闭门120时,所述内周共同限定用于器械模块22的内部腔17。在各方面中,手柄壳体18的近端部分18a或任何合适的位置可具有透明窗口(未示出)以允许观看显示器(例如,lcd,未示出)。
37.手柄组件12具有击发/关闭开关24a和打开开关24b。击发开关24a被配置成并且适于关闭末端执行器200的钳口构件206、208,并且最终实现末端执行器200的钉合功能。打开开关24b被配置成打开末端执行器200的钳口构件206、208。开关24a、24b可被构造为在铰接旋钮壳体14近侧和附近的位置处可移动地联接到手柄壳体18的按钮。激活击发开关24a激活器械模块22的马达25,以根据开关24a或开关24b是否被致动而使手术器械10的击发杆44前进或缩回(图4和5)。击发杆44联接到末端执行器200的从动元件(未明确示出)(其包括刀杆和致动滑板),使得击发杆44的前进使末端执行器200的从动元件前进,这在安全开关28处于致动状态时关闭末端执行器200的钳口构件206、208并且击发末端执行器200。
38.对于手术末端执行器200的构造和操作的详细讨论,可参考2009年8月31日提交的标题为“《用于手术钉合装置的工具组件(tool assembly for a surgical stapling device)》”的美国专利第7,819,896号、2007年4月5日提交的标题为“《具有解剖尖端的手术钉合装置(surgical stapling device with dissecting tip)》”的美国专利第8,066,166号,以及2011年5月12日提交的标题为“《可更换钉仓(replaceable staple cartridge)》”的美国专利第9,820,741号,所述美国专利中的每一个的全部内容以引用的方式并入本文中。
39.安全开关28被构造为横向延伸穿过手柄壳体18的触觉开关。安全开关28具有相对的末端部分,其从手柄壳体18的外表面暴露以允许临床医生在击发停用位置与击发启用位
置之间滑动安全开关28。在击发停用位置,安全开关28接触或松开手柄组件12的印刷电路板32(图3)上的接触开关30(图3),由此尽管致动击发开关24a,也发信号通知器械模块22的处理器(未明确示出)以防止激活马达25。在击发启用位置,安全开关28接触或松开接触开关30,由此发信号通知处理器以允许在致动击发开关24a后激活马达25。在各方面中,安全开关28可在其中具有被配置成闪烁或保持处于稳定状态的灯以指示安全开关28的位置。
40.在一些实施例中,可指派手柄组件12的开关24a、24b、28来致动待由各种手术末端执行器实行的各种功能。预期开关24a、24b、28可以各种方式配置,例如配置为开关、摇臂、翼片、闩锁、操纵杆、拨号盘、按钮或触摸屏。
41.手柄组件12的可重复使用的器械模块或动力组件22包括马达25,例如电驱动马达,其驱动地联接到输出27,例如插座和/或小齿轮。马达25电连接或无线连接到马达控制器或处理器和电池(未明确示出)。在各方面中,电池可包括升压电路并且可为可充电的(例如,无线地)。电池具有卡边缘连接器(未明确示出),其被配置成用于可拆卸地容纳印刷电路板32的卡边缘头部34,以允许从开关24a、24b和安全开关28到电池的通信。处理器可包括usb充电连接器,以允许用usb充电器或无线地(例如,经由感应)给电池充电。
42.关于器械模块22的另外细节可在2020年8月13日提交的美国临时专利申请第63/064,977号中找到,其以上面引用的方式并入。
43.参考图2-5,手术器械10另外包括用于驱动手术末端执行器200的打开/关闭和钉合功能的击发组件40,和用于驱动手术末端执行器200的铰接的铰接组件50。击发组件40通常包括击发轴42(例如导螺杆)、击发螺母43和击发杆44。击发轴42从手柄壳体18向远侧延伸、穿过铰接旋钮壳体14,并且进入轴部分16的近端部分16a。击发轴42具有近端部分42a,其向近侧突出到手柄壳体18的腔17中,以在将器械模块22容纳在腔17中时不可旋转地连接到器械模块22的输出27(图1b)。击发轴42的近端部分42a可具有三叶形配置,并且输出27可具有对应形状的插座,以在其之间形成不可旋转的连接。还预期其它类型的不可旋转连接,如卡口型连接。推力轴承和密封件可提供在击发轴42的近端部分42a与手柄壳体18的远端部分18b之间。
44.击发螺母43围绕击发轴42设置并且螺纹地联接到击发轴42,使得击发螺母43根据击发轴42的旋转方向而向近侧或向远侧平移。击发螺母43为细长的并且具有非圆形的横截面配置,例如d形配置。对于击发螺母43,预期其它横截面配置,例如矩形、三角形等。
45.击发螺母43键接到管状壳体48的对应形状的内表面46,以防止击发螺母43在管状壳体48内旋转或在击发轴42旋转时因击发轴42而旋转。管状壳体48具有近端部分48a(图5),其轴向并且可旋转地限制在限定于手柄壳体18的远端部分18b中的凹穴49内。管状壳体48具有远端部分48b,其支撑在轴部分16的近端部分16a与旋钮壳体14的远端部分之间。
46.击发杆44具有固定到击发螺母43的远端部分43b的近端部分44a。击发杆44向远侧延伸穿过轴部分16,终止于联接到手术末端执行器200的从动元件的远端部分(未明确示出)。
47.参考图2、4和5,手柄组件12的铰接组件50被配置成致动末端执行器200的铰接(例如,使末端执行器200沿水平面在与轴部分16同轴的位置和与轴部分16不对准的多个位置之间移动)。铰接组件50包括旋钮壳体14、铰接螺母52和铰接螺杆54。铰接旋钮或旋钮壳体14在近端14a处可旋转地联接到手柄壳体18,并且在远端14b处可旋转地联接到轴部分16。
48.铰接螺母52具有容纳在手柄壳体18的远端部分18b中的近端部分52a。铰接螺母52的近端部分52a在被手柄壳体18的远端部分18b轴向限制的同时被可旋转地支撑。铰接旋钮14围绕铰接螺母52设置并且可旋转地固定到铰接螺母52,使得铰接旋钮14的手动旋转使铰接螺母52旋转。在各方面中,铰接旋钮14可与铰接螺母52连接、一体地形成或以其他方式联接。
49.铰接螺杆54具有近端部分54a,其容纳在铰接螺母52内并且螺纹地联接到铰接螺母52的螺纹内表面56。铰接螺杆54被配置成根据铰接螺母52的旋转方向相对于铰接螺母52向近侧或向远侧平移。铰接螺杆54限定穿过其中的细长通道56(图2)。击发组件40同心地设置在铰接螺杆54的通道56内,并且铰接螺杆54同心地设置在铰接螺母52内,从而提供这些部件的紧凑组件。
50.铰接组件50另外包括铰接连杆58,其近端部分58a设置在限定在管状壳体48的内表面46与击发螺母43的外表面之间的空间60(图5)中的铰接螺杆54的通道56内。铰接连杆58的近端部分58a具有从其侧向地向外延伸的销62。销62延伸穿过管状壳体48中的侧向开口64,并且固定到铰接螺杆54的远端部分54b,从而将铰接连杆58轴向固定到铰接螺杆54。铰接螺杆54的远端部分54b可经由紧固件66不可旋转地固定到管状壳体48,以在铰接螺母52旋转期间抵抗铰接螺杆54的旋转。
51.铰接连杆58具有远端部分(未明确示出),其联接到可枢转地支撑在轴部分16的远端部分16b中的可枢转连杆(未明确示出)。可枢转连杆将铰接连杆58和手术末端执行器200可枢转地彼此联接,使得铰接连杆58的远侧平移引起可枢转连杆在第一方向上相对于轴部分16铰接手术末端执行器200,并且铰接连杆58的近侧平移引起可枢转连杆在相反的第二方向上相对于轴部分16铰接手术末端执行器200。
52.关于将手术末端执行器可枢转地联接到轴部分的机构的另外细节可参考2019年11月26日提交的美国专利申请第16/695,380号,其全部内容以引用的方式并入本文中。
53.在操作中,器械模块22被插入到手柄壳体18中,并且门20被关闭,从而将非无菌的可重复使用的器械模块22密封在无菌手柄壳体18中。手柄组件12的印刷电路板32的卡边缘头部34连接到器械模块22的卡边缘连接器。在适当地插入器械模块22时,器械模块22的输出27(图1b)驱动地联接到击发轴42的近端部分42a。
54.为了操作手术末端执行器200,可致动按钮24a,由此器械模块22的电池为驱动输出27的旋转的马达25提供动力。当输出27在第一方向上旋转时,使击发轴42旋转以驱动所述驱动螺母43和附接的击发杆44的平移。击发杆44的平移引起钳口构件206、208关闭。为了打开钳口构件206、208,可代替地致动按钮24b。为了在钳口构件206、208处于关闭状态的情况下从手术末端执行器200击发钉,致动安全开关28,并且然后可致动按钮24a,由此手术末端执行器200的从动元件(例如,钉合滑板)平移穿过钳口构件208(例如,仓组件)以将钉击发到组织中。
55.为了使手术末端执行器200朝右(从临床医生的角度)铰接,使铰接旋钮壳体14手动顺时针(从临床医生的角度)旋转,这将旋转运动从旋钮壳体14传递到铰接螺母52。铰接螺母52的旋转驱动铰接螺杆54相对于铰接螺母52向近侧平移,由此向近侧驱动铰接连杆58以铰接手术末端执行器200。类似地,为了向左铰接手术末端执行器200,可手动逆时针旋转铰接旋钮壳体14。由此,铰接旋钮壳体14的手动致动使手术末端执行器200从对应于手术末
端执行器200的非铰接定向的第一位置(即,手术末端执行器200与轴部分16同轴)移动到对应于手术末端执行器200的铰接定向的第二位置(即,手术末端执行器200相对于轴部分16枢转到非平行角度)。在各方面中,旋钮壳体14的旋转可以电子方式或以机器人方式完成。
56.本文中描述的部件中的任一个可考虑强度、耐久性、耐磨损性、重量、耐腐蚀性、易于制造性、制造的成本等由金属、塑料、树脂、复合物等制成。本文中公开的齿轮中的任一个可被配置为任何合适的齿轮,如锥齿轮、正齿轮、螺旋齿轮、蜗轮等。
57.应理解,可对本发明所公开的包括开关组件的手术器械的实施例作出各种修改。因此,以上描述不应解释为限制性的,而仅仅是作为实施例的例证。本领域的技术人员将设想在本公开的范围和精神内的其它修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。