tetrahedra算法构造等值面, 实现病人头部三维图像的构建。
8.进一步地,所述步骤s3中,首先获取所述中心点所在病人头部三维图像的位置,然后基于所述中线点坐标信息及以头部三维图像中心点为原点的坐标系中病人头部三维图像各边界点坐标信息获取以所述中线点坐标信息为原点的坐标系中的各边界点坐标信息。
9.进一步地,所述步骤s4中,基于各边界点的坐标信息绘制一可以将这些边界点全部包裹进去的最小长方体,将该长方体的中心点作为中心点坐标(x0,y0,z0)。
10.进一步地,所述步骤s5中,基于所述的中心点坐标(x0,y0,z0)实现探测器位置的自校准,并基于最小长方体所覆盖的区域实现头部移动ct扫描范围的校正,使得头部移动ct扫描范围能完全覆盖所述最小长方体。
11.本发明还提供了一种头部移动ct探测器的自校准扫描系统,用于实现上述的一种头部移动ct探测器的自校准方法,包括头部移动ct探测器机、机架导轨、头托、病床和摄像头;头部移动ct探测器机安装于可移动底座的机架导轨上,病人躺在病床上,并将头部放置于头托上,头托的上表面均匀覆盖一薄膜式压力传感器,且在头托的侧面配置一用户唤醒和休眠薄膜式压力传感器的按钮,摄像头安装在ct扫描室的天花板上,采用轨道式机器人安装,可以根据需要调整到目标位置进行完成平躺后的病人的头部图像的采集。
12.进一步地,还包括一数据后处理系统,用于获取病人头部所在头托的中心点坐标信息、病人头部三维图像、病人头部的各边界点坐标信息、各边界点的中心点坐标(x0,y0,z0),并实现探测器位置的自校准。
13.本发明可以实现头部移动ct探测器的快速自校准,并可以保证自校准结果的精确性,为所得的ct扫描图像的质量提供了保障。
附图说明
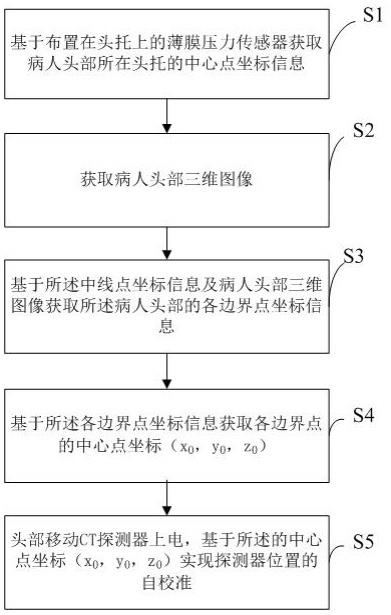
14.图1为本发明实施例一种头部移动ct探测器的自校准方法的流程图。
15.图2为本发明实施例一种头部移动ct探测器的自校准扫描系统的结构示意图。
具体实施方式
16.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
17.实施例1如图1所示,本发明实施例的一种头部移动ct探测器的自校准方法,包括以下步骤:s1、基于布置在头托上的薄膜压力传感器获取病人头部所在头托的中心点坐标信息;具体的,首先获取病人头部与薄膜压力传感器的接触区域,然后通过接触区域形状的识别获取病人头部所在头托的中心点坐标信息;s2、获取病人头部三维图像;具体的,在完成头托的中心点坐标信息采集后,通过摄像头获取病人的头部图像,然后通过kinect深度传感器获取头部图像的深度图像,将所获得的深度图像进行三角化,在尺度空间中融合所有三角化的深度图像构建分层有向距离场,对距离场中所有的体素应用整体三角剖分算法产生一个涵盖所有体素的凸包,并利用
marching tetrahedra算法构造等值面, 实现病人头部三维图像的构建。
18.s3、基于所述中线点坐标信息及病人头部三维图像获取所述病人头部的各边界点坐标信息;具体的,首先获取所述中心点所在病人头部三维图像的位置,然后基于所述中线点坐标信息及以头部三维图像中心点为原点的坐标系中病人头部三维图像各边界点坐标信息获取以所述中线点坐标信息为原点的坐标系中的各边界点坐标信息。
19.s4、基于所述各边界点坐标信息获取各边界点的中心点坐标(x0,y0,z0);具体的,基于各边界点的坐标信息绘制一可以将这些边界点全部包裹进去的最小长方体,将该长方体的中心点作为中心点坐标(x0,y0,z0)。
20.s5、头部移动ct探测器上电,基于所述的中心点坐标(x0,y0,z0)实现探测器位置的自校准。具体的,基于所述的中心点坐标(x0,y0,z0)实现探测器位置的自校准,并基于最小长方体所覆盖的区域实现头部移动ct扫描范围的校正,使得头部移动ct扫描范围能完全覆盖所述最小长方体。
21.本实施例中,所述薄膜压力传感器均匀覆盖整个头托上表面,在病人完成平躺操作后,薄膜式压力传感器唤醒进行压力的采集。
22.实施例2如图2所示,一种头部移动ct探测器的自校准扫描系统,用于实现实施例1所述的头部移动ct探测器的自校准方法,包括头部移动ct探测器机1、机架导轨2、头托3、病床4和摄像头;头部移动ct探测器机1安装于可移动底座的机架导轨2上,病人躺在病床4上,并将头部放置于头托3上,头托3的上表面均匀覆盖一薄膜式压力传感器,且在头托的侧面配置一用户唤醒和休眠薄膜式压力传感器的按钮,摄像头安装在ct扫描室的天花板上,采用轨道式机器人安装,可以根据需要调整到目标位置进行完成平躺后的病人的头部图像的采集。还包括一数据后处理系统,用于获取病人头部所在头托的中心点坐标信息、病人头部三维图像、病人头部的各边界点坐标信息、各边界点的中心点坐标(x0,y0,z0),并实现探测器位置的自校准。
23.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种头部移动ct探测器的自校准方法,其特征在于,包括以下步骤:s1、基于布置在头托上的薄膜压力传感器获取病人头部所在头托的中心点坐标信息;s2、获取病人头部三维图像;s3、基于所述中线点坐标信息及病人头部三维图像获取所述病人头部的各边界点坐标信息;s4、基于所述各边界点坐标信息获取各边界点的中心点坐标(x0,y0,z0);s5、头部移动ct探测器上电,基于所述的中心点坐标(x0,y0,z0)实现探测器位置的自校准。2.如权利要求1所述的一种头部移动ct探测器的自校准方法,其特征在于,所述薄膜压力传感器均匀覆盖整个头托上表面,在病人完成平躺操作后,薄膜式压力传感器唤醒进行压力的采集。3.如权利要求1所述的一种头部移动ct探测器的自校准方法,其特征在于,所述步骤s1中,首先获取病人头部与薄膜压力传感器的接触区域,然后通过接触区域形状的识别获取病人头部所在头托的中心点坐标信息。4.如权利要求1所述的一种头部移动ct探测器的自校准方法,其特征在于,所述步骤s2中,在完成头托的中心点坐标信息采集后,通过摄像头获取病人的头部图像,然后通过kinect深度传感器获取头部图像的深度图像,将所获得的深度图像进行三角化,在尺度空间中融合所有三角化的深度图像构建分层有向距离场,对距离场中所有的体素应用整体三角剖分算法产生一个涵盖所有体素的凸包,并利用marching tetrahedra算法构造等值面, 实现病人头部三维图像的构建。5.如权利要求1所述的一种头部移动ct探测器的自校准方法,其特征在于,所述步骤s3中,首先获取所述中心点所在病人头部三维图像的位置,然后基于所述中线点坐标信息及以头部三维图像中心点为原点的坐标系中病人头部三维图像各边界点坐标信息获取以所述中线点坐标信息为原点的坐标系中的各边界点坐标信息。6.如权利要求1所述的一种头部移动ct探测器的自校准方法,其特征在于,所述步骤s4中,基于各边界点的坐标信息绘制一可以将这些边界点全部包裹进去的最小长方体,将该长方体的中心点作为中心点坐标(x0,y0,z0)。7.如权利要求1所述的一种头部移动ct探测器的自校准方法,其特征在于,所述步骤s5中,基于所述的中心点坐标(x0,y0,z0)实现探测器位置的自校准,并基于最小长方体所覆盖的区域实现头部移动ct扫描范围的校正,使得头部移动ct扫描范围能完全覆盖所述最小长方体。8.一种头部移动ct探测器的自校准扫描系统,用于实现如权利要求1-7任一所述的一种头部移动ct探测器的自校准方法,其特征在于:包括头部移动ct探测器机(1)、机架导轨(2)、头托(3)、病床(4)和摄像头;头部移动ct探测器机(1)安装于可移动底座的机架导轨(2)上,病人躺在病床(4)上,并将头部放置于头托(3)上,头托(3)的上表面均匀覆盖一薄膜式压力传感器,且在头托的侧面配置一用户唤醒和休眠薄膜式压力传感器的按钮,摄像头安装在ct扫描室的天花板上,采用轨道式机器人安装,可以根据需要调整到目标位置进行完成平躺后的病人的头部图像的采集。9.如权利要求8所述的一种头部移动ct探测器的自校准扫描系统,其特征在于:还包括
一数据后处理系统,用于获取病人头部所在头托的中心点坐标信息、病人头部三维图像、病人头部的各边界点坐标信息、各边界点的中心点坐标(x0,y0,z0),并实现探测器位置的自校准。
技术总结
本发明涉及头部移动CT检测领域,具体涉及一种头部移动CT探测器的自校准方法及扫描系统,该自校准方法包括以下步骤:S1、基于布置在头托上的薄膜压力传感器获取病人头部所在头托的中心点坐标信息;S2、获取病人头部三维图像;S3、基于所述中线点坐标信息及病人头部三维图像获取所述病人头部的各边界点坐标信息;S4、基于所述各边界点坐标信息获取各边界点的中心点坐标(x0,y0,z0);S5、头部移动CT探测器上电,基于所述的中心点坐标(x0,y0,z0)实现探测器位置的自校准。本发明可以实现头部移动CT探测器的快速自校准,并可以保证自校准结果的精确性,为所得的CT扫描图像的质量提供了保障。为所得的CT扫描图像的质量提供了保障。为所得的CT扫描图像的质量提供了保障。
技术研发人员:王保奇 张利 杨洋 魏田华 蒋涛 安雅宝
受保护的技术使用者:延安市中医医院
技术研发日:2022.01.11
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。