1.本发明涉及一种差动螺旋机构及基于差动螺旋机构的多轴机床,它是一种双自由度螺旋传动机构和基于螺旋机构的具有多个数控轴的数控机床,属于机械加工技术和装备领域。
背景技术:
2.目前的各种四轴以上的数控机床绝大部分采用串联机构的原理,即一般由两条传动链同时从机床底座出发并分别延伸到机床的主轴和工作台,用于为安装于工作台上的工件和安装于主轴上的刀具或砂轮二者之间提供由过程控制的复杂相对进给运动,从而实现对各种复杂结构件的加工。这类机床因为采用的是串联结构,因此相邻的两个运动单元中离机床底座远的总是叠加于离机床底座较近的运动单元之上,每个运动平台需要移动的质量或惯量总是叠加于其上的所有运动平台的质量或惯量之和,越接近机床底座的运动单元的质量或惯量就越大,这使得底层运动平台在实现高加速度运动时需要更大的驱动力,这也是常规串联结构数控机床运动加速度难以获得显着提高的重要原因,目前能达到的机床加速度大多数在0.3g-3g之间,要进一步提高需要付出更加高昂的代价。采用并联机床可有效解决运动平台加速度过低问题,但六自由度并联机床的刚性很差,难以承受切削加工过程的重载荷,因此出现了将并联机床和串联机床组合在一起的串并联机床,这类机床同时具有高加速度特性和高刚度特性,因此在铝合金结构件加工用大型数控机床上获得成功应用,但这种采用虚拟轴的串并联机床的运动副刚性较差,且摆动范围小,不同方向的刚性不同,不适用于高精度机床,如叶片自由曲面磨床。叶片加工机床和刀具磨床是目前用于加工复杂曲面的两种典型和重要的数控机床,其轴数多达4-6轴、乃至7轴。齿轮加工机床也有需要4轴以上的结构,这些机床目前基本采用串联结构。但受到机床加速度的限制,采用螺旋加工方法加工叶片进排气边区域时弦长会缩短,加工拐角时经常出现过切,进给速度难以达到较理想值,这些问题严重限制了复杂曲面加工技术的发展、加工成本的降低和加工效率的提升。发展高加速度和高精度的数控机床势在必行。
3.采用传统的轻量化设计技术、直线驱动技术和增加电机功率的方法已经难以实现机床加速度的大幅度提升,因此必须另辟蹊径,从机床的机构学原理上找到更根本的解决方法。
技术实现要素:
4.1、目的:本发明的目的是提供一种差动螺旋机构及基于差动螺旋机构的多轴机床,它克服了现有技术的不足,是一种利用差动螺旋机构原理的全新机床传动方式,即将数控机床的一个旋转轴和一个移动轴组合成一个螺旋轴,并利用差动原理使两个相对位置确定的电机分别驱动两个不同导程的螺母,并通过这两个螺母同时驱动一个两端具有不同导程的螺杆(其中一个螺杆的导程可为无穷大,即滚动花键),使螺杆同时做轴线方向的移动和绕轴线的旋转运动的差动螺旋动力头,并利用一个或多个螺旋动力头与其它移动或旋转
运动单元共同构成出各种形式的多轴联动机床,如3-6轴机床。特别地,用两个差动螺旋动力头与一个移动运动单元构成一种全新的五轴联动叶片加工机床。
5.2、技术方案:为达到本发明的目的,采取以下技术方案来实现:
6.见图2,本发明一种差动螺旋机构,它是由螺母旋转单元1、花键套旋转单元2、丝杠花键轴3和机架4组成;它们之间的位置连接关系是:螺母旋转单元1和花键套旋转单元2固连在机架4两端,丝杠花键轴3贯穿螺母旋转单元1与花键套旋转单元2之间并在上述二单元之间运转。
7.所述螺母旋转单元1,是由光栅读数头101,光栅刻度盘102,螺母单元左端盖103,螺母左轴承104,滚动螺母左半105,电机定子106,电机转子107,滚动螺母右半108,螺母单元右端盖109和螺母右轴承110组成;它们之间的位置连接关系是:滚动螺母左半105,电机转子107,滚动螺母右半108通过螺钉连接为螺母转子组件,它们通过螺母左轴承104和螺母右轴承110分别支撑于螺母单元左端盖103和螺母单元右端盖109上,螺母单元左端盖103和螺母单元右端盖109与电机定子106通过螺钉连接于该螺母旋转单元的壳体上,而壳体又通过螺钉连接于机架4上;其作用是利用电机定子106和电机转子107构成的伺服电机驱动滚动螺母左半105和滚动螺母右半108构成的滚动螺母旋转,该螺母因具有相对丝杠的旋转运动而驱动丝杠花键轴做轴向运动,螺母的旋转角度可以通过由光栅读数头101和光栅刻度盘102组成的光栅或其它类似角度检测装置进行检测以实现闭环控制。该光栅读数头是光栅的组成部分之一,用于读取光栅刻度盘的位置数据,它通常与光栅刻度盘构成一个整体作为回转光栅标准件,可以从市场上购买到;该光栅刻度盘是回转光栅的刻度装置,其上刻有条纹,其当前位置可利用干涉原理被光栅读数头读取并传递给数控系统;该螺母单元左端盖和右端盖用于将电机定子固定于机架上,并用于固定光栅读数头和为螺母轴承提供安装空间;该螺母左轴承和右轴承用于支撑电机定子和滚动螺母;该滚动螺母左半和右半共同组成一个滚动螺母,滚动螺母左半105和右半108通常安装在一起用于消除间隙,也可以像本发明一样安装于电机转子的两端用于提高螺母的支撑长度,但存在电机转子的温度影响问题,需要充分冷却;该电机定子和电机转子组成伺服电机,通常可以是力矩电机的定子和转子组成,必要时可以将电机转子更换成齿轮或齿形带轮,其回转运动通过外部的伺服电机传送给该齿轮或齿形带轮。
8.所述花键套旋转单元2,是由光栅读数头201、光栅刻度盘202、花键单元右端盖203、花键套右轴承204、滚动花键套右半205,电机定子206、电机转子207、滚动花键套左半208、花键单元左端盖209和花键套左轴承210组成;它们之间的位置连接关系是:滚动花键套右半205,电机转子207,滚动花键套左半208通过螺钉连接为花键套转子组件,它们通过花键套右轴承204和花键套左轴承210分别支撑于花键单元右端盖203和花键单元左端盖209上,花键单元右端盖203和花键单元左端盖209与电机定子206通过螺钉连接于该花键套旋转单元的壳体上,而壳体又通过螺钉连接于机架4上。光栅读数头201固定于花键单元右端盖203上,光栅刻度盘202固定于滚动花键套右半205上,光栅读数头201和光栅刻度盘202用于测量花键套转子组件的角位移;其作用是利用电机定子206和电机转子207构成的伺服电机驱动花键套转子组件旋转,该花键套转子组件通过花键带动丝杠花键轴做同速回转运动,花键套转子组件的旋转角度可以通过由光栅读数头201和光栅刻度盘202组成的光栅或其它类似角度检测装置进行检测以实现闭环控制。该光栅读数头是光栅的组成部分之一,
用于读取光栅刻度盘的位置数据,它通常与光栅刻度盘构成一个整体作为回转光栅标准件,可以从市场上购买到;该光栅刻度盘是回转光栅的刻度装置,其上刻有条纹,其当前位置可利用干涉原理被光栅读数头读取并传递给数控系统;该花键套转子组件单元左端盖和右端盖用于将电机定子固定于机架上并用于固定光栅读数头和为花键套轴承提供安装空间;该花键套左轴承和右轴承用于支撑电机定子和滚动花键;该滚动花键左半和右半共同组成一个滚动花键套,花键左半208和右半205可以只用一个来实现同样的功能,而同时采用两个可以提高支撑刚度,在只采用二者之一时另一部分的内部可保留大的圆孔;该电机定子和电机转子组成伺服电机,通常可以是力矩电机的定子和转子组成,必要时可以将电机转子更换成齿轮或齿形带轮,其回转运动通过外部的伺服电机传送给该齿轮或齿形带轮。
9.所述丝杠花键轴3的一部分是滚动丝杠,另一部分是滚动花键,分别与滚动螺母和滚动花键啮合。
10.所述机架4是由焊接或铸造工艺制作的箱式金属结构件,它是该机构的基体,其它三单元与之相互连接。
11.其中,根据螺旋机构的传动原理和花键的传动原理,丝杠花键轴可以由滚动螺母-花键套,滚动螺母-花键轴,丝杠-花键套,丝杠-花键轴等四种方案组成,因此可以构造出非常丰富的螺旋机构结构。所述的具体机构和结构也可以根据拓扑不变性和机构等效性以及强度刚度的要求变换出多种结构形式,如单螺母方式、单花键套方式等等。
12.其中,当将主轴电机安装于该机构上时就构成了一个具有螺旋运动的动力头,当将工作台t连接在该机构上时就构成了具有2个运动自由度的工作台。按照工作台和主轴在丝杠花键轴上的中部或端部等两个不同安装位置,可以形成简支和悬臂两种结构方式,即简支式差动螺旋工作台,简支式差动螺旋动力头,悬臂式差动螺旋工作台悬臂式差动螺旋动力头。
13.其中,采用一个悬臂式差动螺旋工作台和一个悬臂式差动螺旋动力头可构成一种双差动螺旋四轴数控机床。
14.其中,采用两个差动螺旋运动单元和一个水平直线运动单元后可形成一种双差动螺旋五轴数控机床。
15.其中,其中的滚动花键也可以采用另一个与前一个螺母导程不同的滚动螺母替换,构成具有两个滚动螺母-丝杠运动副的差动螺旋运动单元,可以用于简化机床预紧结构。
16.图1a和图1b为差动螺旋运动单元的传动原理图。图中,驱动螺母的电机转子a2通过螺母左轴承a1和螺母右轴承a6支撑于机架a5上,螺母驱动电机的电机定子a3固定于机架a5上,滚动螺母a4固连于电机转子a2上,滚动丝杠a7与滚动螺母a4通过丝杠导程为p的螺旋副连接。电机转子a2以螺母旋转角速度w1旋转时,滚动丝杠a7可做轴线方向的移动运动。驱动花键套右轴承b5旋转的电机转子b2通过花键套左轴承b1和花键套右轴承b5支撑于机架b4上,驱动花键套右轴承b5旋转的电机定子b3固定于机架b4,滚动花键套b6固连于电机转子b2上,滚动花键轴b7与花键套右轴承b5以滚动花键副连接。电机转子b2以花键套旋转角速度w2旋转时,丝杠花键轴(输出轴)c将做速度为wc的旋转运动,且wc=w1,而其移动速度vc=(w1-w2)p/2/π。即在滚动螺母a4和花键套右轴承b5的同时驱动下,丝杠花键轴将同时
输出旋转运动和直线运动,即输出一个螺旋运动。
17.根据运动的相对性,丝杠花键轴都采用的是丝杠螺母机构中的外螺纹或外花键组合成的机构,实际上花键套和滚动螺母也可以参与组合成为多种形式的输出结构,包括螺母-花键输出方式,螺母-花键套输出方式,丝杠-花键套输出方式,即与图1a和图1b所示的方式一起共可得到四种不同的输出方式,而且滚动螺母常采用预紧结构,即每个螺母或花键套可以由两段组成,通过预先捏转或在其中间加上调整垫片而消除其中的间隙和提高其扭转和轴向运动的刚度。
18.此外,花键可以认为是螺母的特例,即滚动花键可以认为是导程无穷大的滚动螺母。因此,该机构最一般的形式是图1a和图1b中的滚动花键也可以是滚动丝杠-螺母运动副,此时输出轴的轴线移动速度为vc=(w1p2-w2p1)p/2/π,输出轴的角速度为wc=(w1p1-w2p2)/(p1-p2),其中p1为螺母1的导程、p2为螺母2的导程。这种机构的好处是,当输出轴刚性足够好时每个螺母都只由一个螺母构成,其中的间隙由两个电机相对转动一个小角度而进行控制。从本质上看,螺旋机构是一种并联机构,但是是一种具有良好的工业基础,其零件已经标准化和在大量应用的没有采用球面轴承的2自由度并联机构,当螺母和花键精度足够高时,这两个运动单元省去了通常意义的直线运动导轨,因此其结构得到极大简化,其成本获得显着降低。
19.图2是根据图1a和图1b原理设计的一种差动螺旋运动单元的典型结构。图中,滚动螺母左半105,电机转子107,滚动螺母右半108通过螺钉连接为螺母转子组件,它们通过螺母左轴承104和螺母右轴承110分别支撑于螺母单元左端盖103和螺母单元右端盖109上,螺母单元左端盖103和螺母单元右端盖109与电机定子106通过螺钉连接于该螺母旋转单元的壳体上,而壳体又通过螺钉连接于底座4上。光栅读数头101固定于螺母单元左端盖103上,光栅刻度盘102固定于滚动螺母左半105上,它们用于测量螺母转子组件的角位移。滚动花键套右半205,电机转子207,滚动花键套左半208通过螺钉连接为花键套转子组件,它们通过花键套右轴承204和花键套左轴承210分别支撑于花键单元右端盖203和花键单元左端盖209上,花键单元右端盖203和花键单元左端盖209与电机定子206通过螺钉连接于该花键套旋转单元的壳体上,而壳体又通过螺钉连接于底座4上。光栅读数头201固定于花键单元右端盖203上,光栅刻度盘202固定于滚动花键套右半205上,它们用于测量螺母转子组件的角位移。
20.当电机转子107和207分别驱动螺母转子组件和花键套转子组件旋转时,丝杠花键轴4将作为输出轴,同时输出轴线方向的直线运动和绕该轴线的旋转运动,即形成了可输出给定任意螺旋运动的螺旋运动单元。
21.当将主轴电机s安装于该机构上时就构成了一个具有螺旋运动的动力头,当将工作台t连接在该机构上时就构成了具有2个运动自由度的工作台。按照工作台和主轴在丝杠花键轴3上的不同安装位置,可以形成简支和悬臂两种方式。图3为一种简支式差动螺旋工作台,包括螺母旋转单元1,花键套旋转单元2,丝杠花键轴3,机架4和工作台t。其中工作台连接在丝杠花键轴3的中间部分。图4为一种简支式差动螺旋动力头,包括螺母旋转单元1,花键套旋转单元2,丝杠花键轴3,机架4和主轴s。其中主轴s连接在丝杠花键轴3的中间部分。图5为一种悬臂式差动螺旋工作台,包括螺母旋转单元1,花键套旋转单元2,丝杠花键轴3,机架4和主轴s。其中主轴s连接在丝杠花键轴3的最上边。图6为一种悬臂式差动螺旋动力
头。包括螺母旋转单元1,花键套旋转单元2,丝杠花键轴3,机架4和工作台t。其中工作台连接在丝杠花键轴3的最上边。
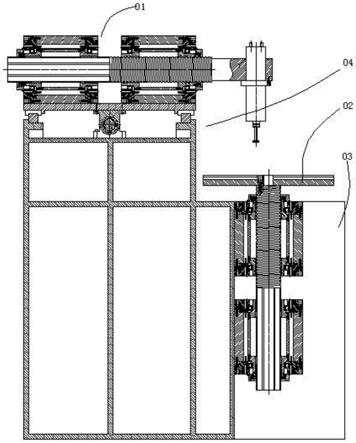
22.图7为采用图5所示的悬臂式差动螺旋工作台和图6所示的悬臂式差动螺旋动力头构成的一种双差动螺旋四轴机床典型结构。在该机构中,主轴和工作台之间可具有两个直线相对运动和两个回转相对运动,即正好两个螺旋运动。图8为在图7所示机构上增加水平直线运动单元4后形成的一种双差动螺旋五轴机床典型结构。在该机构中,主轴和工作台之间可具有3个直线相对运动和两个回转相对运动,即正好由两个螺旋运动和一个直线运动组成,可实现五轴联动加工运动。
23.3、优点及功效:1)显着提高机床加速度,提高复杂曲面的加工效率和加工精度。利用差动螺旋机构可以将传统的由一个直线运动单元和一个回转运动单元组成的机构中的移动质量从一个工作台和一个电机的质量减轻为一个丝杠的质量,这种质量上的改变通常可以达到10倍到100倍,由于丝杆和花键可以集成在同一段圆柱面上,这样可以进一步减轻移动部分的质量和惯量,因此,与传统的轻量化设计等方案比较,该发明可以很轻松地提高机床的加速度1-2个数量级。可以预期,采用螺旋机构的机床加速度可以达到3-10个重力加速度,而目前要达到2个重力加速度已经是非常困难的。2)可大幅度降低多轴机床的结构复杂程度。采用差动螺旋机构可以省去直线运动导轨,使机床成为无导轨或少导轨机床,这样可以大幅度降低机床成本;3)可以构造出全新的低成本高性能多轴数控机床系列。利用差动螺旋机构可以构造出一个系列的全新的多轴数控机床,如一个差动螺旋机构和一个直线运动单元可构成圆柱坐标机床,两个差动螺旋机构可构成新型四轴数控机床,两个差动螺旋机构和一个直线运动单元可构成与常规叶片加工机床运动链相同的五轴叶片加工机床,三个差动螺旋机构可构成六轴数控机床,可以满足复杂刀具磨削等的需要。
附图说明
24.图1a是差动螺旋运动单元的传动原理图。
25.图1b是差动螺旋运动单元的传动原理图。
26.图2是一种差动螺旋运动单元的典型结构。
27.图3是一种简支式差动螺旋工作台。
28.图4是一种简支式差动螺旋动力头。
29.图5是一种悬臂式差动螺旋工作台。
30.图6是一种悬臂式差动螺旋动力头。
31.图7是一种双差动螺旋四轴机床典型结构。
32.图8是一种双差动螺旋五轴机床典型结构。
33.图9是一种基于螺旋机构的五轴数控机床。
34.图中各符号意义如下:
35.a1螺母左轴承,a2电机转子,a3电机定子,a4滚动螺母,a5(b4)机架,
36.a6螺母右轴承,a7滚动丝杠;
37.b1花键套左轴承,b2电机转子,b3电机定子,b4机架,b5花键套右轴承,
38.b6滚动花键套,b7滚动花键轴;
39.c丝杠花键轴,p丝杠导程,w1螺母旋转角速度,w2花键套旋转角速度,
40.wc丝杠花键轴(输出轴)旋转角速度,vc丝杠花键轴(输出轴)移动速度;
41.1螺母旋转单元,2花键套旋转单元,3和3’和3”:丝杠花键轴(或输出轴),4机架(或底座);
42.101光栅读数头,102光栅刻度盘,103螺母单元左端盖,104螺母左轴承,105滚动螺母左半,106电机定子,107电机转子,108滚动螺母右半,109螺母单元右端盖,110螺母右轴承;
43.201光栅读数头,202光栅刻度盘,203花键单元右端盖,204花键套右轴承,205滚动花键套右半,206电机定子,207电机转子,208滚动花键套左半,209花键单元左端盖,210花键套左轴承;
44.t工作台,s主轴;
45.01悬臂螺旋动力头,02悬臂螺旋工作台,03底座,04水平直线运动单元,
46.a滚动丝杠轴b滚动花键轴w3丝杠花键轴的角速度。
47.d1螺旋机构1,d2固定板,d3为床身,d4为主轴头,d5为工件,d6为工作台,d7螺旋机构2。
具体实施方式
48.见图1a、图1b、图2,本发明一种差动螺旋机构,它是由螺母旋转单元1、花键套旋转单元2、丝杠花键轴3和机架4组成;它们之间的位置连接关系是:螺母旋转单元1和花键套旋转单元2固连在机架4两端,丝杠花键轴3贯穿螺母旋转单元1与花键套旋转单元2之间并在上述二单元之间运转。
49.图2是一种差动螺旋运动单元的典型实施例。图中,滚动螺母左半105,电机转子107,滚动螺母右半108通过螺钉连接为螺母转子组件,它们通过螺母左轴承104和螺母右轴承110分别支撑于螺母单元左端盖103和螺母单元右端盖109上,螺母单元左端盖103和螺母单元右端盖109与电机定子106通过螺钉连接于该螺母旋转单元的壳体上,而壳体又通过螺钉连接于底座4上。光栅读数头101固定于螺母单元左端盖103上,光栅刻度盘102固定于滚动螺母左半105上,它们用于测量螺母转子组件的角位移。滚动花键套右半205,电机转子207,滚动花键套左半208通过螺钉连接为花键套转子组件,它们通过花键套右轴承204和花键套左轴承210分别支撑于花键单元右端盖203和花键单元左端盖209上,花键单元右端盖203和花键单元左端盖209与电机定子206通过螺钉连接于该花键套旋转单元的壳体上,而壳体又通过螺钉连接于底座4上。光栅读数头201固定于花键单元右端盖203上,光栅刻度盘202固定于滚动花键套右半205上,它们用于测量螺母转子组件的角位移。
50.当电机转子107和207分别驱动螺母转子组件和花键套转子组件旋转时,丝杠花键轴4将作为输出轴同时输出轴线方向的直线运动和绕该轴线的旋转运动,即形成了可输出给定任意螺旋运动的螺旋运动单元。
51.当将主轴电机s安装于该机构上时就构成了一个具有螺旋运动的动力头,当将工作台t连接在该机构上时就构成了具有2个运动自由度的工作台。按照工作台和主轴在丝杠花键轴4上的不同安装位置,可以形成简支和悬臂两种方式,图3为一种简支式差动螺旋工作台,图4为一种简支式差动螺旋动力头,图5为一种悬臂式差动螺旋工作台,图6为一种悬臂式差动螺旋动力头。
52.图7为采用图5所示的悬臂式差动螺旋工作台和图6所示的悬臂式差动螺旋动力头构成的一种双差动螺旋四轴机床典型结构。在该机构中,主轴和工作台之间可具有两个直线相对运动和两个回转相对运动,即正好两个螺旋运动。图8为在图7所示机构上增加水平直线运动单元4后形成的一种双差动螺旋五轴机床典型结构。在该机构中,主轴和工作台之间可具有3个直线相对运动和两个回转相对运动,即正好由两个螺旋运动和一个直线运动组成,可实现五轴联动加工运动。图9是一种基于图8结构的五轴数控机床的实施案列。d1为带主轴头的螺旋机构1,可带动主轴头实现x轴移动和a轴的转动;d2为固定板,固定螺旋机构1,可由电机驱动丝杠,带动螺旋机构在导轨上实现y轴的移动;d3为床身;d4为主轴头;d5为工件;d6为工作台;d7为带工作台的螺旋机构2,可带动工作台实现z轴的移动和c轴的转动。该机构中,主轴和工作台之间可具有3个直线相对运动和两个回转相对运动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
