1.本发明属于线径测量装置技术领域,具体为一种基于图像识别的架空线线径测量装置及其工作方法。
背景技术:
2.在电力系统中,导线的线径决定着线路的最大负荷,电力导线的安全可靠运行是电网安全运行的最根本保障,对架空线线径的测量,通常需要在带电的情况下进行,目前架空线测量线径,采用卡尺或圈尺测量,常用的卡尺或圈尺测量都需要近距离带绝缘手套对比观察,既不安全,又不准确,也浪费时间,现有技术中利用绝缘操作杆远程操作,在卡尺上设置有带记忆功能的指标,卡尺远程测量后,测量人员在地面通过读数刻度读出导线线径,使得测量人员能够安全地测量导线线径,但是带有记忆功能的指标不稳定,容易造成偏差,有些架空线离地比较高,难以用绝缘杆上的卡尺进行测量。
3.因此,需要设计一套架空运行导线线径测量仪,通过远程方式测量架空线的线径,原理为基于远程图像识别,通过计算已知参考物的像素点面积,通过像素点所占待测导线面积进行线径运算,最终换算得出导线线径,常用导线线径由于是非连续的,可在一定误差裕度内实现准确测径。
技术实现要素:
4.本发明的目的在于:架空运行导线线径测量仪采用远程图像识别模式进行线径测量,不受地形的限制,任何高度、位置的架空线的线径都可进行测量,扩大了测量范围,节省了测量时间,提高了工作效率,该架空运行导线线径测量仪轻便,操作方便,判定误差小于0.1%,可用于常见架空钢芯铝绞线及裸导线的测径,通过地面简单操作、自动算出导线直径,操作方便,测量准确,简单培训即可学会操作,具有广阔的推广前景,通过缓冲机构与定位机构的使用,使线径测量仪在工作过程中移动时受到减震保护,避免测量仪内部受到损坏,当运输到规划地点时,定位机构伸长,固定位置,防止检测过程中受到晃动,影响检测成果。
5.本发明采用的技术方案如下:一种基于图像识别的架空线线径测量装置,包括:外壳;缓冲机构,设于外壳内,用于测量装置在移动过程中进行减震,其中,所述缓冲机构包括限位部件、拉伸部件、牵引部件、四个缓冲弹簧、四个伸缩杆和滚轮底座,所述滚轮底座滑动设置于外壳的内壁靠近底部处,四个所述伸缩杆分别固定连接与滚轮底座的上表面边缘处,且四个伸缩杆的顶部均固定连接于外壳的上内壁,四个所述缓冲弹簧分别套设于四个伸缩杆的外表面,且四个缓冲弹簧的底部固定连接于滚轮底座的上表面,四个所述缓冲弹簧的顶部固定连接于外壳的上内壁;以及定位机构,设于外壳内,用于测量装置的位置限定,其中,所述定位机构包括定位脚、两个固定气缸和两个顶盘,所述定位脚固定连接于限位部件上,两个所述固定气缸分别
固定连接于外壳的上内壁靠近两侧边缘中心处,两个所述顶盘分别固定连接于两个固定气缸的输出端。
6.其中,所述限位部件包括两个限位板、两个滑槽和移动板,两个所述限位板分别固定连接于外壳的上内壁两侧,两个所述滑槽分别开设于两个限位板的顶部处,所述移动板的两端中心处分别滑动连接于两个滑槽内壁。
7.其中,所述拉伸部件包括两个移动块、三个限位套和三个拉伸弹簧,两个所述移动块分别滑动连接于移动板的内壁两端,三个所述拉伸弹簧等距固定连接于两个移动板的外表面相互靠近的一侧,三个所述限位套分别套设于三个拉伸弹簧的外表面。
8.其中,所述牵引部件包括四个转动连轴和四个牵引杆,四个所述转动连轴分别固定连接于滚轮底座的上表面靠近边缘处,四个所述牵引杆的一端分别转动连接于四个转动连轴,且四个牵引杆的另一端分别转动连接于两个移动块的两端。
9.其中,所述外壳的外表面中心处开设有安装槽,所述安装槽的内壁底部处开设有卡接槽。
10.其中,所述安装槽的内壁滑动连接有安装块,所述安装块的内壁通过螺栓固定连接有卡接气缸。
11.其中,所述卡接气缸的输出端固定连接有三棱柱,所述三棱柱的外表面靠近底部处等距转动连接有三个连杆。
12.其中,三个所述连杆远离三棱柱的一端均转动连接有卡接块,三个所述卡接块均卡接设置于卡接槽的内壁。
13.其中,所述安装块的上表面中心处螺纹连接有转动连接铰,所述转动连接铰的内壁安装设置有测量仪,所述转动连接铰的外表面一侧中心处安装设置有调角旋转钮。
14.一种基于图像识别的架空线线径测量装置及其工作方法,包括以下步骤:步骤一、安装仪器:将测量仪安装在转动连接铰中,并通过调角旋转钮进行固定,与转动连接铰一起安装在安装块,将安装块放入安装槽中,由卡接气缸进行伸长,通过三棱柱推动连杆,使卡接块与卡接槽卡接,整体安装在外壳上;步骤二、移动减震:推动外壳使整体设备移动到规划的位置,期间,遇见颠簸时,伸缩杆伸缩或收缩,缓冲弹簧进行缓冲减力,两个移动块在移动板之间移动,通过拉伸弹簧进行牵引,并且,牵引杆进行位置牵制,保证整体作用可实现;步骤三、位置限定,当移动到规划位置时,两个固定气缸进行伸长,通过顶盘对移动板达到平衡,并克服缓冲拉伸弹簧的作用力,将移动板向下压,使定位脚深入地面,进行装置整体的位置固定步骤四,调整角度,进行测量:转动调角旋转钮调整测量仪与转动连接铰之间的角度,使测量仪的角度可以对需要测量架空线进行测量即可,测量完成后进行装置的存放。
15.综上所述,由于采用了上述技术方案,本发明的有益效果是:(1)本发明中,架空运行导线线径测量仪采用远程图像识别模式进行线径测量,不受地形的限制,任何高度、位置的架空线的线径都可进行测量,扩大了测量范围,节省了测量时间,提高了工作效率。
16.(2)本发明中,该架空运行导线线径测量仪轻便,操作方便,判定误差小于0.1%,可用于常见架空钢芯铝绞线及裸导线的测径,通过地面简单操作、自动算出导线直径,操作方
便,测量准确,简单培训即可学会操作,具有广阔的推广前景。
17.(3)本发明中,通过缓冲机构与定位机构的使用,使线径测量仪在工作过程中移动时受到减震保护,避免测量仪内部受到损坏,当运输到规划地点时,定位机构伸长,固定位置,防止检测过程中受到晃动,影响检测成果。
附图说明
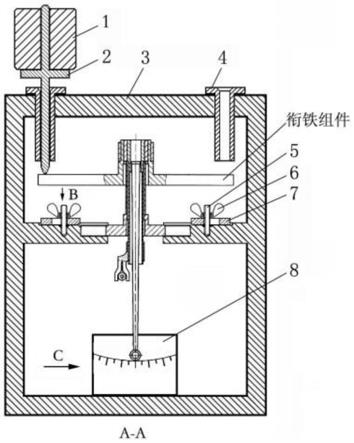
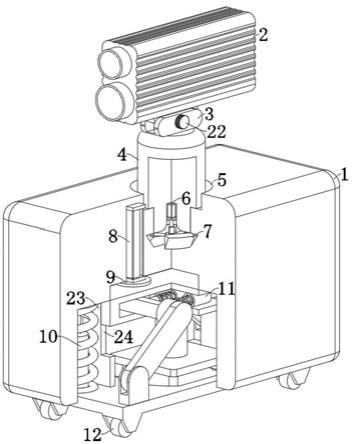
18.图1为本发明的部分剖视图;图2为本发明的立体图;图3为本发明的缓冲机构部分剖视图;图4为本发明的缓冲机构立体图;图5为本发明的部分剖视图;图6为本发明的部分立体图;图7为本发明的定位机构立体图。
19.图中标记:1、外壳;2、测量仪;3、转动连接铰;4、安装块;5、安装槽;6、卡接气缸;7、卡接块;8、固定气缸;9、顶盘;10、缓冲弹簧;11、限位套;12、滚轮底座;13、三棱柱;14、连杆;15、拉伸弹簧;16、移动块;17、伸缩杆;18、牵引杆;19、转动连轴;20、定位脚;21、移动板;22、调角旋转钮;23、限位板;24、滑槽;25;卡接槽。
具体实施方式
20.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
21.实施例一,参照图1-7:一种基于图像识别的架空线线径测量装置,包括:外壳1;缓冲机构,设于外壳1内,用于测量装置在移动过程中进行减震,其中,缓冲机构包括限位部件、拉伸部件、牵引部件、四个缓冲弹簧10、四个伸缩杆17和滚轮底座12,滚轮底座12滑动设置于外壳1的内壁靠近底部处,四个伸缩杆17分别固定连接与滚轮底座12的上表面边缘处,且四个伸缩杆17的顶部均固定连接于外壳1的上内壁,四个缓冲弹簧10分别套设于四个伸缩杆17的外表面,且四个缓冲弹簧10的底部固定连接于滚轮底座12的上表面,四个缓冲弹簧10的顶部固定连接于外壳1的上内壁;以及定位机构,设于外壳1内,用于测量装置的位置限定,其中,定位机构包括定位脚20、两个固定气缸8和两个顶盘9,定位脚20固定连接于限位部件上,两个固定气缸8分别固定连接于外壳1的上内壁靠近两侧边缘中心处,两个顶盘9分别固定连接于两个固定气缸8的输出端。
22.本实施例中:外壳1用于测量装置的安装,滚轮底座12的底部四个拐角有轮子,方便整体移动,伸缩杆17在滚轮底座12的两侧靠近中心与缓冲弹簧10一起,在颠簸震动的状态下进行上下缓冲,固定气缸8在限位机构上方两侧,与限位机构有一定距离,不影响限位机构的使用,两个顶盘9的整体面积较大,使两个固定气缸8在作用时,不影响平衡,通过作用使外壳1固定。
23.具体的,限位部件包括两个限位板23、两个滑槽24和移动板21,两个限位板23分别固定连接于外壳1的上内壁两侧,两个滑槽24分别开设于两个限位板23的顶部处,移动板21的两端中心处分别滑动连接于两个滑槽24内壁。
24.本实施例中:限位板23与滚轮底座12之间有距离,不影响滚轮底座12向上运动,移动板21两端中心有突出滑块,与滑槽24对应,进行位置限定。
25.具体的,拉伸部件包括两个移动块16、三个限位套11和三个拉伸弹簧15,两个移动块16分别滑动连接于移动板21的内壁两端,三个拉伸弹簧15等距固定连接于两个移动板21的外表面相互靠近的一侧,三个限位套11分别套设于三个拉伸弹簧15的外表面。
26.本实施例中:两个移动块16相对的一侧都有支杆,与拉伸弹簧15进行连接,进行位置拉伸,并由限位套11限制拉伸弹簧15的位置,不会相互影响。
27.具体的,牵引部件包括四个转动连轴19和四个牵引杆18,四个转动连轴19分别固定连接于滚轮底座12的上表面靠近边缘处,四个牵引杆18的一端分别转动连接于四个转动连轴19,且四个牵引杆18的另一端分别转动连接于两个移动块16的两端。
28.本实施例中:牵引杆18与转动连轴19和移动块16之间均是转动,方便随着位置变化而变化。
29.具体的,外壳1的外表面中心处开设有安装槽5,安装槽5的内壁底部处开设有卡接槽25。
30.本实施例中:安装槽5与卡接槽25一体,且卡接槽25在安装槽5下方,卡接槽25呈现圆台形状,方便使用。
31.具体的,安装槽5的内壁滑动连接有安装块4,安装块4的内壁通过螺栓固定连接有卡接气缸6。
32.本实施例中:安装块4壁安装槽5略小,方便进行安装连接,卡接气缸6是主要的动力,根据需要进行市面上的选择即可。
33.具体的,卡接气缸6的输出端固定连接有三棱柱13,三棱柱13的外表面靠近底部处等距转动连接有三个连杆14。
34.本实施例中:三个连杆14在三棱柱13的三个面上,且两者之间使用球铰进行连接,灵活性更好。
35.具体的,三个连杆14远离三棱柱13的一端均转动连接有卡接块7,三个卡接块7均卡接设置于卡接槽25的内壁。
36.本实施例中:三个连杆14与三个卡接块7之间也是用球铰连接,使卡接气缸6在收缩时不受连杆14与卡接块7和卡接槽25之间角度的影响。
37.具体的,安装块4的上表面中心处螺纹连接有转动连接铰3,转动连接铰3的内壁安装设置有测量仪2,转动连接铰3的外表面一侧中心处安装设置有调角旋转钮22。
38.本实施例中:测量仪2内置一个高精度的光电耦合器,基于远程图像识别,通过计算已知参考物的像素点面积,通过像素点所占待测导线面积进行线径运算,最终换算得出导线线径,并且,测量仪2采用tcd2252d型线阵ccd,它是一种高灵敏度、低暗电流、2700像元的内置采样保持电路的彩色线阵ccd图像传感器, 利用光学系统射出的平行光束照射tcd2252d,当将被测物体放置在tcd2252d的感光窗口前面时,由于被测物体的遮挡,在ccd感光窗口的相应位置会形成阴影,从而使得ccd输出信号的相应位置出现凹陷,凹陷的宽度
与被测物体直径成正比,对其进行二值化处理得到二值化信号,将积分时间信号sh作为同步信号输入单片机,作为计数起始信号,取tcd2252d的一路输出信号输入非门,这样被遮挡的像元的输出信号就由低电平变成了高电平,再将输出信号和转移脉冲φ1信号通过与门之后输入单片机,单片机对与门输出的信号中高电平进行计数,把计数值n乘以像元长度l就可以得到中间线径值m,由于将积分时间信号sh作为同步信号,对与门输出的信号中高电平计数的结果中还包含一部分无效的高电平,这是由积分时间sh、转移脉冲φ1之间的时序关系决定的,所以得到的真实的线径值d还需要中间线径值m 减去这部分无效信号所带来的无效长度δd:d=m-δd=n
×
l-δd,最后将所得的线径值d在显示屏上面显示出来,通过调角旋转钮22调整转动连接铰3与测量仪2之间的力度,进行二者之间角度的调整,选择最合适的角度进行测量。
39.使用时:步骤一、安装仪器:将测量仪2安装在转动连接铰3中,并通过调角旋转钮22进行固定,与转动连接铰3一起安装在安装块4,将安装块4放入安装槽5中,由卡接气缸6进行伸长,通过三棱柱13推动连杆14,使卡接块7与卡接槽25卡接,整体安装在外壳1上,步骤二、移动减震:推动外壳1使整体设备移动到规划的位置,期间,遇见颠簸时,伸缩杆17伸缩或收缩,缓冲弹簧10进行缓冲减力,两个移动块16在移动板21之间移动,通过拉伸弹簧15进行牵引,并且,牵引杆18进行位置牵制,保证整体作用可实现,步骤三、位置限定,当移动到规划位置时,两个固定气缸8进行伸长,通过顶盘9对移动板21达到平衡,并克服缓冲拉伸弹簧15的作用力,将移动板21向下压,使定位脚20深入地面,进行装置整体的位置固定,步骤四,调整角度,进行测量:转动调角旋转钮22调整测量仪2与转动连接铰3之间的角度,使测量仪2的角度可以对需要测量架空线进行测量即可,测量完成后进行装置的存放。
40.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。