1.本实用新型涉及一种隧道内混凝土的浇筑施工设备,具体涉及一种二衬台车自动逐窗入模浇筑机械臂。
背景技术:
2.隧道二次衬砌施工保证了隧道在运营使用过程中永久稳定,安全美观,同时也是作为安全储备的一种工程措施.分层逐窗入模工艺解决了传统工艺的质量通病,提高了浇筑密实度,同时降低了施工劳动强度,减少了浇筑时间,提高了施工效率及经济效益。行业内采用的工艺方式有:料斗溜槽分层逐窗入模浇筑、布料小车分配泵管逐窗入模浇筑、布料转盘分配泵管逐窗入模浇筑等。现有的这些分层逐窗入模工艺方式存在装置占用顶部通道空间、管道分布错综复杂、管路清理维护繁琐、操作复杂、劳动强度大等问题。
技术实现要素:
3.为了解决现有技术的不足,本实用新型提供一种二衬台车自动逐窗入模浇筑机械臂。
4.本实用新型采用以下述方式实现的:
5.一种二衬台车自动逐窗入模浇筑机械臂,包括液压站,与液压站连接的控制系统,连接控制系统的浇筑机械臂,其特征在于:所述的浇筑机械臂包括机械臂和机械臂内部浇筑管路,所述的机械臂顶部设有安装底座,所述安装底座下部连接第一回转装置,第一回转装置连接机械臂基座,所述的机械臂基座活动连接第一回转关节,第一回转关节活动连接机械臂一臂,在所述的机械臂基座上设置有用于推拉所述机械臂一臂的一臂油缸;所述机械臂一臂活动连接第二回转关节,第二回转关节活动连接机械臂二臂,在所述的机械臂一臂上设置有用于推拉机械臂二臂的二臂油缸;所述机械臂二臂连接第二回转装置,第二回转装置连接机械臂三臂连接;所述机械臂三臂活动连接第三回转关节,第三回转关节活动连接机械臂四臂,在所述的机械臂三臂上设置有用于推拉机械臂四臂的三臂油缸。
6.第一回转装置上设置有第一动力部件,第一动力部件带动第一回转装置转动,第一回转装置带动机械臂水平方向旋转,水平方向旋转的角度为-180
°
~180
°
。
7.机械臂一臂旋转的垂直角度为0
°
~90
°
。
8.机械臂二臂旋转的垂直角度为0
°
~90
°
。
9.第二回转装置上设置有第二动力部件,第二动力部件带动第二回转装置转动,第二回转装置带动机械三臂水平方向旋转,水平方向旋转的角度为-155
°
~155
°
。
10.机械臂四臂旋转的垂直角度为0
°
~90
°
。
11.浇筑管路的采用标准内径为125mm,连接法兰直径148mm的耐磨混凝土泵管。
12.控制系统设有遥控系统和电气控制回路,遥控系统的控制信号控制液压站动作,控制油缸的伸缩及控制动力部件的工作进而控制机械臂的伸缩及旋转动作。
13.第一动力部件为液压马达、电机减速机、伺服电机、步进电机中的一种,动力部件
为回转装置提供动力。
14.第二动力部件为液压马达、电机减速机、伺服电机、步进电机中的一种,动力部件为回转装置提供动力。
15.相对于现有技术,本实用新型的机械臂固定于二衬台车顶层通道横梁下部,不占用顶层施工通道空间,浇筑机械臂可灵活到达各个指定浇筑窗口及顶部浇筑泵管位置,实现用一套装置进行侧模浇筑及顶部浇筑的逐窗浇筑功能,浇筑使用泵管布置在机械臂上,台车上无需布置管道,避免了错综复杂的管路带来的麻烦,这个机械臂进行逐窗浇筑时共用一趟管路,节约了泵管的使用,同时解决了每个窗口浇筑完需要清理泵管的繁琐过程,整个注浆机械臂的操作采用无线遥控自动控制,操作人员在地面上方便观察的位置操作机械臂运动到各个浇筑窗口及管口,使得操作简单便捷、安全可靠,大大提高了施工效率及降低了操作者的劳动强度。
附图说明
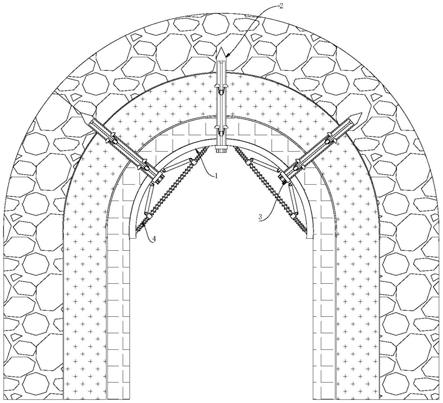
16.图1是本实用新型的安装结构示意图。
17.图2是自动逐窗入模浇筑机械臂结构示意图。
18.图3是机械臂结构图。
19.图4是浇筑管路结构图。
20.其中:1、液压站,2、控制系统,3、浇筑机械臂,4、二衬台车,31、机械臂,32、浇筑管路,311、安装底座,312、第一回转装置,313、第一液压马达,314、机械臂基座,315、第一回转关节,316、一臂油缸,317、机械臂一臂,318、第二回转关节,319、二臂油缸,3110、机械臂二臂,3111、第二回转装置,3112、第二液压马达,3113、机械臂三臂,3114、三臂油缸,3115、第三回转关节,3116、机械臂四臂,321、弯头带单珠轴承,322、z型管,323、u型两端带单珠轴承管,324、直管带单珠轴承,325、橡胶泵管带148/156变径。
具体实施方式
21.下面结合附图和具体实施方式对本实用新型作进一步详细说明。
22.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
23.如附图1所示,一种二衬台车自动逐窗入模浇筑机械臂,机械臂安装底座311固定于二衬台车4顶层通道横梁下部,可通过机械臂的伸缩与旋转控制浇筑管路的出口到达各个浇筑窗口及顶部浇筑管口的位置。
24.如附图2所示,一种二衬台车自动逐窗入模浇筑机械臂,由浇筑机械臂3,连接浇筑机械臂3的控制系统2和液压站1组成,浇筑机械臂3由机械臂31和机械臂内部的浇筑管路32组成。操作工通过遥控器给2控制系统发出指令开关信号,控制系统2通过电缆控制液压站1内部的电磁阀吸合,然后液压站1通过连接在机械臂31上的油管来执行各个动作,机械臂31运动同时带动着浇筑管路32运动,浇筑管路32的管口位置到达操作工需要控制到达的窗口
位置。
25.如附图3所示,机械臂31包括安装底座311,机械臂基座314,机械臂一臂317,机械臂二臂3110,机械臂三臂3113和机械臂四臂3116。
26.安装底座311和机械臂基座314通过第一回转装置312的上下面法兰连接,第一回转装置312连接第一液压马达313,第一液压马达313能驱动第一回转装置312旋转,第一回旋装置312连接机械臂基座314,第一回旋装置312转动带动机械臂基座314旋转,可使整个浇筑机械臂在水平方向旋转,旋转的角度为-180
°
~180
°
。
27.所述的机械臂基座314铰接第一回转关节315,第一回转关节315铰接机械臂一臂317,在所述的机械臂基座314上设置有用于推拉所述机械臂一臂317的一臂油缸316,一臂油缸316一端通过铰耳连接在机械臂基座314上,另一端通过铰耳连接在械臂一臂317,机械臂一臂317相对于机械臂基座314通过第一回转关节315旋转的垂直角度为0
°
~90
°
。
28.所述机械臂一臂317铰接第二回转关节318,第二回转关节318铰接机械臂二臂3110,在所述的机械臂一臂317上设置有用于推拉机械臂二臂3110的二臂油缸319,二臂油缸319一端通过铰耳连接在械臂一臂317上,另一端通过铰耳连接在机械臂二臂3110上,机械臂二臂3110通过第二回转关节318相对于机械臂一臂317旋转的垂直角度为0
°
~90
°
。
29.机械臂二臂3110连接第二回转装置3111,第二回转装置3111连接机械臂三臂3113,第二回转装置3111上设置有第二液压马达3112,第二液压马达3112带动第二回转装置3111转动,第二回转装置3111带动机械臂三臂3113水平方向旋转,水平方向旋转的角度为-155
°
~155
°
。
30.机械臂三臂3113铰接第三回转关节3115,第三回转关节3115铰接机械臂四臂3116,在所述的机械臂三臂3113上设置有用于推拉机械臂四臂3116的三臂油缸3114,三臂油缸3114一端通过铰耳连接在机械臂三臂3113上,另一端通过铰耳连接在机械臂四臂3116上,机械臂四臂3116通过第三回转关节3115相对于机械臂三臂3113旋转的垂直角度为0
°
~90
°
。
31.如附图4所示,浇筑管路32采用标准内径125mm,连接法兰直径148mm的耐磨混凝土泵管,其中除标准弯头规格为125
×
r180-90
°
、直管带单珠轴承、148/156变径及橡胶泵管外,其他连接管路为定制件,有321弯头带单珠轴承、322 z型定制管及323定制u型两端带单珠轴承管。
32.本实用新型的工作过程为:操作人员按下遥控器后,遥控器给2控制系统发出指令开关信号,控制系统2通过电缆控制液压站1内部的电磁阀吸合,然后液压站1通过连接在机械臂31上的油管来执行各个动作,机械臂31运动同时带动着浇筑管路32运动,浇筑管路32的管口位置到达操作工需要控制到达的窗口位置完成浇筑,第一液压马达313带动第一回转装置312,第一回旋装置312连接机械臂基座314,第一回旋装置312转动带动机械臂基座314旋转,可使整个机械臂在-180
°
~180
°
水平范围内转动,使浇筑机械臂在二衬台车内实现一周内旋转,通过第一回转关节315和一臂油缸316使机械一臂317相对于机械臂基座314在垂直方向0~90
°
的范围内旋转,同样的方法,机械臂二臂3110通过第二回转关节318和二臂油缸319使机械臂二臂3110相对于机械一臂317在垂直方向0~90
°
的范围内旋转;机械臂四臂3116通过第三回转关节3115和三臂油缸3114使机械臂四臂3116相对于机械三臂3113在垂直方向0~90
°
的范围内旋转,机械三臂通过第二液压马达3113带动第二回转装置3112,可
以使机械三臂3113相对于机械二臂在-155
°
~155
°
范围内旋转,通过以上的工作,使机械臂到大二衬台车内部各个窗口,灵活的对每个窗口实施浇筑,操作人员在地面上方便观察的位置操作机械臂运动到各个浇筑窗口及管口,使得操作简单便捷、安全可靠,大大提高了施工效率及降低了操作者的劳动强度。
33.上所述的仅是本实用新型的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本实用新型整体构思前提下,还可以作出若干改变和改进,这些也应该视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。