技术特征:
1.一种晶圆转移系统,其特征在于,包括:开盒单元,用于开闭晶圆盒;晶圆翻转单元,用于将晶圆在水平状态和垂直状态之间转换;晶圆转移单元,用于在所述开盒单元和所述晶圆翻转单元之间转移水平状态的晶圆;其中,所述晶圆翻转单元包括晶圆固定机构,所述晶圆固定机构包括:水平支撑机构,所述水平支撑机构包括两个相对设置的支撑梳柱,以配合支撑水平状态的晶圆,且两所述支撑梳柱之间形成供所述晶圆进出的通道;周向夹持机构,所述周向夹持机构包括分设于所述通道两端的至少两个夹持梳柱,至少两个所述夹持梳柱与所述支撑梳柱相配合,以夹持位于所述支撑梳柱上的所述晶圆。2.根据权利要求1所述的晶圆转移系统,其特征在于,所述开盒单元包括用于夹持晶圆盒顶端的连接头的夹持机构,所述夹持机构包括:夹持安装座;设置于所述夹持安装座上的顶爪;至少两相对设置的下爪,所述下爪沿所述顶爪周向设置;以及,设置于所述夹持安装座上的驱动件二,所述驱动件二用于驱动至少两相对设置的所述下爪向所述顶爪的中心方向移动,以将连接头夹持于所述下爪和所述顶爪之间。3.根据权利要求1所述的晶圆转移系统,其特征在于,所述晶圆转移单元包括晶圆转移机械臂,所述晶圆转移机械臂包括晶圆夹具,所述晶圆夹具包括:至少一个托爪盘,所述托爪盘上设置有至少两个托爪块,以形成用于容纳并承托晶圆的收容空间;限位装置,所述限位装置包括推杆和推杆驱动机构,所述推杆驱动机构用于驱动所述推杆朝向所述收容空间移动,以使得位于所述收容空间内的所述晶圆边缘被夹持于所述推杆和所述托爪块之间。4.根据权利要求1所述的晶圆转移系统,其特征在于,所述晶圆转移单元包括晶圆转移机械臂,所述晶圆转移机械臂包括晶圆水平承托装置,所述晶圆水平承托装置包括:至少一个托爪盘,所述托爪盘上设置有两个托爪组,两所述托爪组均包括至少一个托爪块,以形成用于容纳并承托晶圆的收容空间;托爪组驱动机构,所述托爪组驱动机构与至少一个所述托爪组连接,用于驱动一所述托爪组移动,以使所述收容空间与待收容的所述晶圆相适配。5.根据权利要求1所述的晶圆转移系统,其特征在于,所述周向夹持机构包括分设于所述通道两端的两个夹持梳柱,且两个所述夹持梳柱的中心位置与两个所述支撑梳柱的中心位置相适配;或,所述周向夹持机构包括分设于所述通道两端的至少三个夹持梳柱,且至少三个所述夹持梳柱所形成的封闭图形的外接圆的圆心位置与两个所述支撑梳柱的中心位置相适配;或,所述周向夹持机构包括两两分设于所述通道两端的四个夹持梳柱,四个所述夹持梳柱所形成的封闭图形的外接圆的圆心位置与两个所述支撑梳柱的中心位置重合。6.根据权利要求1所述的晶圆转移系统,其特征在于,所述支撑梳柱包括多个支撑板,
多个所述支撑板沿垂直于水平面的方向依次间隔层叠设置,以水平支撑多片所述晶圆;所述夹持梳柱包括多片夹持板,所述夹持板与对应所述支撑板相配合,以接触对应所述支撑板上的所述晶圆边缘。7.根据权利要求6所述的晶圆转移系统,其特征在于,所述支撑梳柱还包括沿所述通道的高度方向设置的转轴,多个所述支撑板与所述转轴连接,以在所述转轴的旋转带动下靠近并支撑所述晶圆,或远离并避让所述晶圆;所述夹持梳柱能够转动,以带动所述夹持板远离并避让进出所述通道的晶圆,或靠近并相互配合夹持位于所述支撑梳柱上的晶圆。8.根据权利要求6所述的晶圆转移系统,其特征在于,所述夹持板的端头设置有与所述晶圆的厚度相配合的v型槽;相邻所述夹持板之间设置有间隙,且所述间隙与所述晶圆相配合以供所述晶圆穿过。9.根据权利要求7所述的晶圆转移系统,其特征在于,多个所述支撑板沿所述转轴的周向设置有一列,且所述支撑板的任意一端支撑所述晶圆;或,多个所述支撑板沿所述转轴的周向至少设置有两列,且两列中的任意一列所述支撑板支撑所述晶圆。10.根据权利要求1-9任一所述的晶圆转移系统,其特征在于,所述晶圆翻转单元还包括:外壳,所述晶圆固定机构设置于所述外壳内,且所述外壳对应所述通道的两端设置有用于所述晶圆进出的开口;和,驱动机构,所述外壳与所述驱动机构的执行端连接,并在其驱动下绕平行于水平面且垂直于所述通道的轴线旋转,以使所述通道平行或垂直于水平面。11.根据权利要求10所述的晶圆转移系统,其特征在于,所述晶圆翻转单元还包括:晶圆承载装置,所述晶圆承载装置用于承载由晶圆翻转装置翻转为垂直状态的晶圆,所述晶圆承载装置包括至少两组嵌套设置的承载晶圆梳组,且至少一组所述承载晶圆梳组能够相对其他所述承载晶圆梳组升降。12.根据权利要求2所述的晶圆转移系统,其特征在于,所述下爪包括用于与所述连接头的底面相抵靠的抵靠面,所述抵靠面为倾斜面,且其向靠近所述顶爪中心的方向逐渐降低。13.根据权利要求2所述的晶圆转移系统,其特征在于,所述驱动件二为滑轨型平行机械爪,所述驱动件二的两滑块分别连接两相对设置的所述下爪。14.根据权利要求2所述的晶圆转移系统,其特征在于,还包括:晶圆盒开关器和升降机构,所述晶圆盒开关器包括装载台和开盒机构,所述装载台用于承载晶圆盒,所述开盒机构设置于所述装载台的侧边,并用于开闭所述晶圆盒,所述升降机构用于带动所述夹持机构在所述装载台和暂存位置间移动。15.根据权利要求12所述的晶圆转移系统,其特征在于,所述下爪和所述顶爪上设置有与所述连接头的凹口相适配的触压式传感器;所述触压式传感器设置于所述下爪的内侧,并位于所述抵靠面的上方,以朝向所述连接头的凹口。16.根据权利要求14所述的晶圆转移系统,其特征在于,所述装载台上设置有承载板以及承载板驱动机构,所述承载板用于承载所述晶圆盒,所述承载板开设有避让槽一,所述避让槽一由所述承载板背离所述开盒机构的一侧向内延伸,且所述避让槽一贯穿所述承载板
的厚度方向,所述承载板驱动机构用于驱动所述承载板位于开盒位置以靠近所述开盒机构,或位于避让位置以远离所述开盒机构,并且所述夹持机构位于所述避让位置的正上方。17.根据权利要求14所述的晶圆转移系统,其特征在于,还包括:多个存储板,所述存储板开设有避让槽二,所述避让槽二由所述存储板的自由侧向内延伸,且所述避让槽二贯穿所述存储板的厚度方向;晶圆盒转移机械手,所述晶圆盒转移机械手用于将位于所述暂存位置上的所述晶圆盒转移至所述存储板上。18.根据权利要求3所述的晶圆转移系统,其特征在于,所述晶圆转移机械臂包括两个所述晶圆夹具。19.根据权利要求3所述的晶圆转移系统,其特征在于,所述托爪块为阶梯状,且包括至少一组相互连接的承托面和限位面,以形成至少一收容空间,所述承托面用于承托所述晶圆,所述限位面用于限制所述晶圆水平移动。20.根据权利要求4所述的晶圆转移系统,其特征在于,所述托爪块为阶梯状,且沿其高度方向包括至少两个承托面,两所述托爪组内的对应所述承托面相适配,以用于承托所述晶圆;所述承托面背离所述托爪盘的一侧设置有限位面,所述限位面朝向所述收容空间的中心,以限制位于对应所述承托面上的所述晶圆偏离;所述托爪组驱动机构用于驱动一所述托爪组移动,以使对应所述承托面与待收容的所述晶圆相适配。21.根据权利要求4所述的晶圆转移系统,其特征在于,所述托爪组驱动机构包括驱动件一、与所述驱动件一连接的传动组件、与所述传动组件连接的衔接件、以及与所述衔接件连接并用于安装任一所述托爪组的安装件;所述传动组件为小导程的丝杠传动组件;所述驱动件一为带有绝对值编码器的电机。22.根据权利要求3或4所述的晶圆转移系统,其特征在于,所述收容空间的底面直径大于所述晶圆的直径。23.根据权利要求3或4所述的晶圆转移系统,其特征在于,包括多个依次间隔层叠设置的托爪盘模组,所述托爪盘模组包括连接座和与所述连接座连接的多个所述托爪盘,且多个所述托爪盘沿所述连接座的高度方向依次间隔层叠设置;多个所述托爪盘模组的相对高度可调,和/或同一所述托爪盘模组内的多个所述托爪盘的相对高度可调。24.根据权利要求3或4所述的晶圆转移系统,其特征在于,所述托爪盘上设置有两个所述托爪块,以两个所述托爪块所在直线为直径形成所述收容空间;或,所述托爪盘上设置有至少三个所述托爪块;或,所述托爪盘上设置有四个所述托爪块,两两所述托爪块平行设置于所述托爪盘的两端。25.根据权利要求19或20所述的晶圆转移系统,其特征在于,所述承托面水平设置,或所述承托面相对水平面朝向所述托爪盘以及所述收容空间中心的方向倾斜设置;所述限位面沿所述托爪块的高度方向延伸,或所述限位面沿所述托爪块的高度方向并朝向所述收容空间外部延伸。26.根据权利要求19或20所述的晶圆转移系统,其特征在于,所述限位面为与所述晶圆的圆周相适配的弧形面。
技术总结
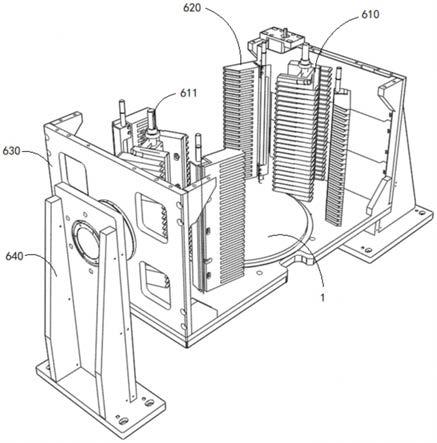
本实用新型公开了一种晶圆转移系统,包括:开盒单元,用于开闭晶圆盒;晶圆翻转单元,用于将晶圆在水平状态和垂直状态之间转换;晶圆转移单元,用于在开盒单元和晶圆翻转单元之间转移水平状态的晶圆。本实用新型通过开盒单元、晶圆转移单元以及晶圆翻转单元相配合,实现将晶圆由晶圆盒内取出,并将水平状态的晶圆翻转为垂直状态,并进一步可实现批量晶圆操作,从而为实现晶圆工艺处理高效运行提供了基础。础。础。
技术研发人员:吴功 倪萌 李国勇 刘军峰 李冰野 郑英杰 国建花
受保护的技术使用者:上海大族富创得科技有限公司
技术研发日:2021.09.17
技术公布日:2022/4/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。