1.本实用新型涉及机器人,具体为一种风电检测机器人。
背景技术:
2.随着风电行业的快速发展,风机叶片重量和尺寸的增加,对叶片的维护和维修提出了新的挑战。人工检测作为传统的叶片检测方法,存在以下缺点:高空作业,检测成本高,风险高;检测效率低,工人劳动强度大;长期作业,发电量损失大。近几年来,行业内人员越来越重视风机叶片的监测问题,逐渐发展了基于声发射信号、振动信号、红外热成像、超声波、张力分析等多种风机叶片状态检测的技术,并结合了不同信号处理的方法实现叶片的故障诊断。这些研究在一定程度上促进了风机叶片状态检测的发展,也为装置设备的状态检测领域提供了一些新的思路。
技术实现要素:
3.针对上述情况,为克服现有技术的缺陷,本实用新型提供一种风电检测机器人,有效的解决了上述技术背景中提到的问题。
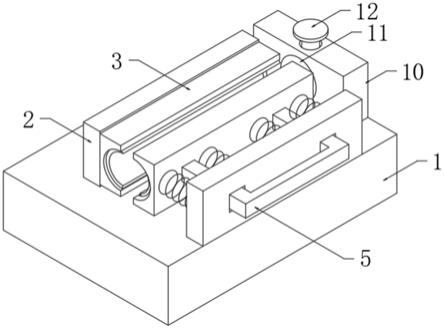
4.为实现上述目的,本实用新型提供如下技术方案:本实用新型包括飞行器壳体,飞行器壳体底端中部设置的高清摄像头,飞行器壳体底端四角设置的四个支腿,飞行器壳体四角呈“x”型布置的四个连接臂以及连接臂一端设置的机翼,还包括倾转机构,所述机翼的外侧设置有倾转机构;
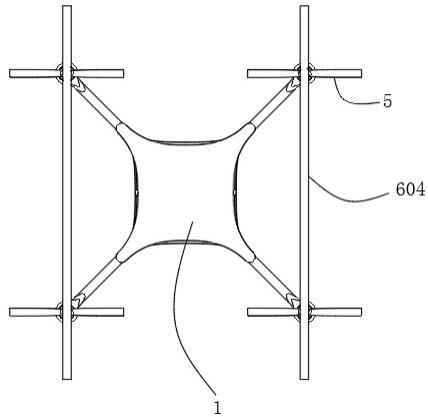
5.所述倾转机构包括支撑臂、弧形块、弧形筒、倾转轮、轮槽、套环、薄膜压力传感器、安装孔和辅助杆,支撑臂固定在连接臂的一端,支撑臂的一端设置有弧形块,弧形筒固定在支腿的底部,弧形块和弧形筒的内部设置有可转动的倾转轮,弧形块外侧的中部设置有轮槽,弧形块的内壁处嵌入安装有薄膜压力传感器,支撑臂的底部设置有辅助杆。
6.优选的,所述弧形块的一端设置有套环。
7.优选的,所述薄膜压力传感器电性连接飞行器上的处理器。
8.优选的,所述支撑臂对应连接臂端部位置处开设有安装孔。
9.优选的,所述辅助杆的一端与支撑臂连接,支撑臂的另一端与弧形块的底端连接。
10.优选的,所述高清摄像头通过云台与飞行器壳体连接。
11.有益效果:本实用新型使用时,“x”型机器人在进行垂直运动时只要同时增加或者减小电机m1、m2、m3、m4的转速就能让飞行器实现垂直运动,如图2-示,如果想让飞行器前后飞行,实现俯仰运动,我们需要将m1、m2的电机转速减小或者将m3、m4的转速增加这时飞行器会产生向前方的力,使飞行器向前飞行,相反,如果将m1、m2的电机转速增加或者将m3、m4的电机转速减小,这时飞行器会向后方飞行,如图2所示,如果想让四旋翼左右飞行,实现滚转运动,同俯仰飞行一样,我们只需将电机m2、m3的电机转速增加或者将m1、m3的电机转速减小,飞行器便产生向右上方的合力,飞行器便能向右飞行,反之,飞行器将会向左方进行滚转运动,如图2所示,如果想让飞行器在空中左右转向,实现偏航运动,我们需要将处在对
角线上的m1、m3的电机转速增加或者另一对角线的m2、m4的电机转速减小,飞行器可以实现向右方的旋转,从而可以向右方做偏航运动,反之,如果将m1、m3的电机转速减小或者将m2、m4的电机转速增加,飞行器会向左产生旋转,实现朝左方偏航,当由飞行机制向吸附机制转换时,通过倾转轴可以将轴上的两个机翼实现向贴近壁面的方向和竖直向上的方向进行偏转以提供检测机器人在进行竖直壁面或有特殊角度壁面的爬行过程中所需要的吸附力和克服机器人自身重力,进而完成机器人飞行模式上的转变,当机翼倾转到与墙壁互相平行时,机翼产生的气动力会与墙壁产生一个吸附力,实现机器人的爬壁。
12.本实用新型结构新颖,构思巧妙,便于对风机叶片检修,检测成本低,风险低;检测效率高,工人劳动强度效;短期作业,发电量损失小。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
14.图1是本实用新型整体结构示意图;
15.图2是本实用新型侧视图;
16.图3是本实用新型弧形块剖视图;
17.图4是本实用新型垂直运动动力图;
18.图5是本实用新型俯仰运动动力图;
19.图6是本实用新型翻滚运动动力图;
20.图中标号:1、飞行器壳体;2、高清摄像头;3、支腿;4、连接臂;5、机翼;6、倾转机构;601、支撑臂;602、弧形块;603、弧形筒;604、倾转轮;605、轮槽;606、套环;607、薄膜压力传感器;608、安装孔;609、辅助杆。
具体实施方式
21.下面结合附图1-6对本实用新型的具体实施方式做进一步详细说明。
22.实施例一,由图1-6给出,本实用新型提供一种风电检测机器人,包括飞行器壳体1,飞行器壳体1底端中部设置的高清摄像头2,飞行器壳体1底端四角设置的四个支腿3,飞行器壳体1四角呈“x”型布置的四个连接臂4以及连接臂4一端设置的机翼5,还包括倾转机构6,机翼5的外侧设置有倾转机构6;
23.倾转机构6包括支撑臂601、弧形块602、弧形筒603、倾转轮604、轮槽605、套环606、薄膜压力传感器607、安装孔608和辅助杆609,支撑臂601固定在连接臂4的一端,支撑臂601的一端设置有弧形块602,弧形筒603固定在支腿3的底部,弧形块602和弧形筒603的内部设置有可转动的倾转轮604,弧形块602外侧的中部设置有轮槽605,弧形块602的内壁处嵌入安装有薄膜压力传感器607,支撑臂601的底部设置有辅助杆609。
24.具体使用时:本实用新型使用时,“x”型机器人在进行垂直运动时只要同时增加或者减小电机m1、m2、m3、m4的转速就能让飞行器实现垂直运动,如图2所示,如果想让飞行器前后飞行,实现俯仰运动,我们需要将m1、m2的电机转速减小或者将m3、m4的转速增加这时飞行器会产生向前方的力,使飞行器向前飞行,相反,如果将m1、m2的电机转速增加或者将m3、m4的电机转速减小,这时飞行器会向后方飞行,如图2所示,如果想让四旋翼左右飞行,
实现滚转运动,同俯仰飞行一样,我们只需将电机m2、m3的电机转速增加或者将m1、m3的电机转速减小,飞行器便产生向右上方的合力,飞行器便能向右飞行,反之,飞行器将会向左方进行滚转运动,如图2所示,如果想让飞行器在空中左右转向,实现偏航运动,我们需要将处在对角线上的m1、m3的电机转速增加或者另一对角线的m2、m4的电机转速减小,飞行器可以实现向右方的旋转,从而可以向右方做偏航运动,反之,如果将m1、m3的电机转速减小或者将m2、m4的电机转速增加,飞行器会向左产生旋转,实现朝左方偏航,当由飞行机制向吸附机制转换时,通过倾转轴可以将轴上的两个机翼5实现向贴近壁面的方向和竖直向上的方向进行偏转以提供检测机器人在进行竖直壁面或有特殊角度壁面的爬行过程中所需要的吸附力和克服机器人自身重力,进而完成机器人飞行模式上的转变,当机翼5倾转到与墙壁互相平行时,机翼产生的气动力会与墙壁产生一个吸附力,实现机器人的爬壁。
25.有益效果:本实用新型结构新颖,构思巧妙,便于对风机叶片检修,检测成本低,风险低;检测效率高,工人劳动强度效;短期作业,发电量损失小。
26.实施例二
27.实施例一中弧形块602内倾转轮604限制不便,参照图3,作为另一优选实施例,与实施例一的区别在于,弧形块602的一端设置有套环606,便于对弧形块602内的倾转轮604进行限制。
28.实施例三
29.实施例一中倾转轮604与墙壁接触压力信号采集不便,参照图1和图2,作为另一优选实施例,与实施例一的区别在于薄膜压力传感器607电性连接飞行器上的处理器,通过安装的薄膜压力传感器607采集倾转轮604与墙壁接触时产生的压力,并将压力信号传递给飞行器上的处理器,从而便于机器人进行倾斜角度和推力大小。
30.实施例四
31.实施例一中支撑臂601安装不便,参照图2,作为另一优选实施例,与实施例一的区别在于支撑臂601对应连接臂4端部位置处开设有安装孔608,便于支撑臂601的安装固定。
32.实施例五
33.实施例一中支撑臂601强度不足,参照图2和图3,作为另一优选实施例,与实施例一的区别在于辅助杆609的一端与支撑臂601连接,支撑臂601的另一端与弧形块602的底端连接,提高支撑臂601的整体强度。
34.实施例六
35.实施例一中高清摄像头2使用不便,参照图2,作为另一优选实施例,与实施例一的区别在于高清摄像头2通过云台与飞行器壳体1连接,保证高清摄像头2的使用性能。
36.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。