1.本发明涉及容器清洗技术领域,尤其涉及一种组培瓶全自动清洗机。
背景技术:
2.组培苗的工厂化生产过程中需要经过多次的继代换瓶,为降低成本通常使用玻璃组培瓶,玻璃组培瓶经清洗后可以重复利用。当前,大型组培工厂大多采用流水线式半机械化操作进行组培瓶的清洗,以提高清洗效率。但此类清洗设备大多占地面积过大,并不太适合中小型组培工厂和实验室。现有的小型组培瓶清洗机则智能化程度低,需要人员持续地辅助操作,使用体验差。
3.有鉴于此,特提出本发明。
技术实现要素:
4.本发明要解决的技术问题在于克服现有技术的不足,提供一种组培瓶全自动清洗机,机械化程度高,不需要人员持续辅助操作。
5.为实现上述发明目的,本技术提供如下技术方案:一种组培瓶全自动清洗机,包括:清洗配合转筒,所述清洗配合转筒包括旋转筒体和多个瓶体装载部,各瓶体装载部沿所述旋转筒的圆周方向依次设置,各瓶体装载部包括沿清洗配合转筒的轴线方向依次设置的多个瓶笼;摆瓶输送轨道,所述摆瓶输送轨道具有多个送料轨道槽,各所述送料轨道槽分别延伸至清洗配合转筒沿轴线方向的不同位置上;倾斜振动台,所述倾斜振动台的一端延伸至各所述送料轨道槽;翻瓶输出轨道,所述翻瓶输出轨道设置于清洗配合转筒背离所述摆瓶输送轨道的一侧,翻瓶输出轨道包括台面和多个出料轨道槽,各所述出料轨道槽的一端分别延伸至所述清洗配合转筒沿轴线方向的不同位置上,各所述出料轨道槽的另一端分别延伸至所述台面;冲洗组件,所述冲洗组件至少包括多个朝向清洗配合转筒的喷头。
6.可选的,组培瓶全自动清洗机还包括第一卡瓶检测器和第二卡瓶检测器;所述第一卡瓶检测器的检测信号光路经过所述摆瓶输送轨道和所述清洗配合转筒之间的间隙;所述第二卡瓶检测器的检测信号光路经过所述翻瓶输出轨道和所述清洗配合转筒之间的间隙。
7.可选的,组培瓶全自动清洗机还包括驱动装置、进料翻瓶器和定位控制部;所述驱动装置和所述进料翻瓶器传动连接;所述进料翻瓶器沿长度方向设置有多个进料翻瓶部,各所述进料翻瓶部分别能延伸至相应的送料轨道槽内;
所述进料翻瓶器上沿周向设置多个定位触发部;在所述进料翻瓶器旋转过程中,各所述定位触发部顺次触发所述定位控制部,以生成驱动装置暂停指令。
8.可选的,组培瓶全自动清洗机还包括定位机构,所述定位机构和所述清洗配合转筒传动连接;所述冲洗组件包括中部冲洗组件,所述中部冲洗组件包括多个朝向所述清洗配合转筒的喷头;清洗配合转筒具有输送状态和清洗状态;在所述输送状态下,所述定位机构驱动所述清洗配合转筒旋转;在所述清洗状态下,所述定位机构锁定所述清洗配合转筒,所述中部冲洗组件执行喷淋作业。
9.可选的,所述定位机构包括锁定结构和可转动的驱动体;所述驱动体上设置偏心凸轮和驱动杆;所述锁定结构包括锁定杆和连接所述锁定杆的复位弹簧,所述锁定杆的一端抵顶于所述偏心凸轮;所述旋转筒体连接有驱动板,所述驱动板沿周向设置多个配合槽;在所述输送状态下,锁定杆脱离一所述配合槽的状态下,所述驱动杆插入一所述配合槽带动所述驱动板转动;在所述清洗状态下,所述驱动杆脱离一所述配合槽时,所述锁定杆插入一所述配合槽。
10.可选的,组培瓶全自动清洗机还包括刷瓶装置,所述刷瓶装置包括多个伸缩瓶刷,各所述伸缩瓶刷沿所述旋转筒体的轴线方向依次设置,各所述伸缩瓶刷均向所述旋转筒体延伸;所述刷瓶装置具有伸长状态和回缩状态;在所述清洗状态下,所述伸缩瓶刷处于伸长状态,所述伸缩瓶刷延伸至位于所述瓶笼内的组培瓶内;在所述回缩状态下,所述伸缩瓶刷脱离瓶笼,处于回缩状态。
11.可选的,所述冲洗组件还包括前部冲洗组件和后部冲洗组件;所述前部冲洗组件位于所述摆瓶输送轨道的底部,所述前部冲洗组件包括多个朝向相应的送料轨道槽的喷头;所述后部冲洗组件设置于所述中部冲洗组件和所述翻瓶输出轨道之间,所述后部冲洗组件包括多个朝向所述清洗配合转筒的喷头。
12.可选的,组培瓶全自动清洗机包括弧形镂空轨道,所述弧形镂空轨道贴合于所述清洗配合转筒的底部,且沿所述清洗配合转筒的圆周方向延伸;在组培瓶容纳于所述瓶笼的状态下,所述组培瓶的开口端抵顶于所述弧形镂空轨道。
13.可选的,组培瓶全自动清洗机还包括中水存储箱和汇流盒,所述汇流盒设置于所述中水存储箱和所述清洗配合转筒之间;所述汇流盒包括集液口和排液口,所述集液口位于所述清洗配合转筒的底部,所述排液口连通所述中水存储箱。
14.可选的,组培瓶全自动清洗机包括进料翻瓶器,摆瓶输送轨道包括多个挡板,相邻
两个挡板之间形成所述送料轨道槽,所述挡板包括平直输送段和弧形翻转段,所述进料翻瓶器设置于所述弧形翻转段的一侧;组培瓶全自动清洗机还包括第一防护盖板和第二防护盖体,所述第一防护盖板和第二盖体均具有打开状态和闭合状态;在所述闭合状态下,所述第一防护盖板覆盖各所述挡板的平直输送段,所述第二防护盖板覆盖各所述挡板的弧形翻转段。
15.通过采用上述技术方案,使得本发明具有以下有益效果:本技术的组培瓶全自动清洗机能够自动执行组培瓶的输送和清洗任务,机械化程度高,不需要人员持续辅助操作。本技术的组培瓶全自动清洗机针对中小型组培工厂或实验室,占地面积小,能够提高劳动效率,降低人工成本。
16.下面结合附图对本发明的具体实施方式作进一步详细的描述。
附图说明
17.附图作为本技术的一部分,用来提供对本发明的进一步的理解,本发明的示意性实施例及其说明用于解释本发明,但不构成对本发明的不当限定。显然,下面描述中的附图仅仅是一些实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。在附图中:图1示出本技术实施例提供的组培瓶全自动清洗机的立体结构示意图;图2示出本技术实施例提供的组培瓶全自动清洗机的另一立体结构示意图;图3示出本技术实施例提供的组培瓶全自动清洗机的俯视视角图;图4示出本技术实施例提供的组培瓶全自动清洗机的局部结构爆炸图;图5示出本技术实施例提供的进料翻瓶器的结构示意图;图6示出本技术实施例提供的组培瓶全自动清洗机的清洗配合转筒与定位机构的配合结构示意图;图7示出本技术实施例提供的组培瓶全自动清洗机局部结构的侧视图;图8示出本技术实施例提供的组培瓶全自动清洗机的刷瓶装置的结构示意图;图9示出本技术实施例提供的组培瓶全自动清洗机的粉碎装置的爆炸图;图10示出本技术实施例提供的组培瓶全自动清洗机的集液盒、汇流盒和中水存储箱的结构示意图;图11示出本技术实施例提供的组培瓶全自动清洗机的中水存储箱的结构示意图;图12示出本技术实施例提供的组培瓶全自动清洗机的汇流盒与滤网的配合结构示意图;图13示出本技术实施例提供的组培瓶全自动清洗机的瓶体装载部的结构示意图。
18.图中,0010、清洗配合转筒;0011、瓶笼;0011a、弹性滑动支撑体;0011b、摩擦板;0012、隔离板;0013、驱动板;0013a、配合槽;0020、摆瓶输送轨道;0021、送料轨道槽;0022、挡板;0022a、平直输送段;0022b、弧形翻转段;0023、挡片;0030、进料翻瓶器;0031、第一轴体;0032、第一拨片;0032a、第一边;0032b、第二边;0032c、弧形边;0033、定位触发部;0040、倾斜振动台;0050、翻瓶输出轨道;0051、台面;0052、出料轨道槽;0060、出料翻瓶器;0070、定位机构;0071、传动轮系;0072、驱动体;0073、驱动杆;0074、锁定杆;0080、弧形镂空轨道;
0090、刷瓶装置;0091、伸缩瓶刷;0091a、刷头;0092、底座;0093、伸缩部件;0094、滑块;0095、穿套体;0095a、外齿圈; 0100、前部冲洗组件;0101、第一前冲洗管;0102、第二前冲洗管;0110、中部冲洗组件;0120、后部冲洗组件;0121、内部冲洗管;0122、外部冲洗管;0130、中水存储箱;0131、滤网;0132、原液腔;0133、过滤腔;0134、第一凹陷槽;0135、第二凹陷槽;0136、水泵;0137、溢流盒;0140、汇流盒;0141、第一导流板;0142、第二导流板;0150、第一防护盖板;0160、第二防护盖体;0170、集液盒;0180、粉碎装置;0181、筒体;0182、固定研磨盘;0183、活动研磨盘;0184、电机;0185、传动轴;0190、组培瓶。
19.需要说明的是,这些附图和文字描述并不旨在以任何方式限制本发明的构思范围,而是通过参考特定实施例为本领域技术人员说明本发明的概念。
具体实施方式
20.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
21.在本发明的描述中,需要说明的是,术语
ꢀ“
上”、“下”、
ꢀ“
内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、
ꢀ“
连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
23.实施例一参见图1至图13所示,本技术实施例一提供一种组培瓶全自动清洗机,包括:清洗配合转筒0010、摆瓶输送轨道0020、倾斜振动台0040、冲洗组件和翻瓶输出轨道0050。所述清洗配合转筒0010包括旋转筒体和多个瓶体装载部,各瓶体装载部沿所述旋转筒的圆周方向依次设置,所述瓶体装载部包括沿所述清洗配合转筒0010的轴线方向依次设置的多个瓶笼0011。摆瓶输送轨道0020具有多个送料轨道槽0021,各所述送料轨道槽0021分别延伸至清洗配合转筒0010沿轴线方向的不同位置上。倾斜振动台0040延伸至各所述送料轨道槽0021。翻瓶输出轨道0050设置于清洗配合转筒0010背离所述摆瓶输送轨道0020的一侧,翻瓶输出轨道0050包括台面0051和多个出料轨道槽0052,各所述出料轨道槽0052的一端分别延伸至所述清洗配合转筒0010沿轴线方向的不同位置上,各所述出料轨道槽0052的另一端分别延伸至所述台面0051。冲洗组件至少包括多个朝向清洗配合转筒0010的喷头。至少在清洗配合转筒0010旋转至某一瓶体装载部位置清洗工位且暂停时,该冲洗组件可以开始执行冲洗作业,对瓶体装载部上的各组培瓶进行有效的冲洗。
24.本技术的组培瓶全自动清洗机能够自动执行组培瓶的输送和清洗任务,机械化程度高,不需要人员持续辅助操作。本技术的组培瓶全自动清洗机针对中小型组培工厂或实验室,占地面积小,能够提高劳动效率,降低人工成本。
25.自动清洗机还包括第一卡瓶检测器和第二卡瓶检测器。所述第一卡瓶检测器的检
测信号光路经过所述摆瓶输送轨道0020和所述清洗配合转筒0010之间的间隙。所述第二卡瓶检测器的检测信号光路经过所述翻瓶输出轨道0050和所述清洗配合转筒0010之间的间隙。第一卡瓶检测器和第二卡瓶检测器可以均为红外检测器,且可以为面光源。当第一卡瓶检测器和第二卡瓶检测器的检测信号被阻挡时,则可判断发生了卡瓶故障。
26.进一步的,组培瓶全自动清洗机还包括驱动装置、进料翻瓶器0030和定位控制部。所述驱动装置和所述进料翻瓶器0030传动连接。所述进料翻瓶器0030沿长度方向设置有多个第一翻瓶部,各所述第一翻瓶部分别能延伸至相应的送料轨道槽0021内。所述翻瓶器上沿周向设置多个定位触发部0033。在所述翻瓶器旋转过程中,各所述定位触发部0033顺次触发所述定位控制部,以生成驱动装置暂停指令,从而使得进料翻瓶器0030暂时处于暂停状态,而此时清洗配合转筒0010可以旋转,将下一瓶体装载部转运至清洗工位。其中定位控制部可以为接近开关,在定位触发部0033靠近定位控制部时,可触发驱动装置暂停指令。
27.第一卡瓶检测器可以同时起到卡瓶检测和拨片停止转动两个作用。具体的,在第一翻瓶部旋转时,而清洗配合转筒0010则处于暂停状态。第一翻瓶部旋转至定位触发部0033触发所述定位控制部时,第一卡瓶检测器开启,检测发射信号是否被阻挡,若发射信号被阻挡,则表明有瓶体被卡,此时组培瓶全自动清洗机报警,且控制第一翻瓶部停止运行。若发射信号没有被阻挡,则说明各组培瓶0190被顺利地装入瓶笼0011内,接着清洗配合转筒0010开始旋转。
28.参见图4和图6所示,组培瓶0190小型全自动清洗机还包括定位机构0070,所述定位机构0070和所述清洗配合转筒0010传动连接。冲洗组件包括中部冲洗组件0110,所述中部冲洗组件0110包括多个朝向所述清洗配合转筒0010的喷头。清洗配合转筒0010具有输送状态和清洗状态。在所述输送状态下,所述定位机构0070驱动所述清洗配合转筒0010旋转;在所述清洗状态下,所述定位机构0070锁定所述清洗配合转筒0010,所述中部冲洗组件0110执行喷淋作业。
29.所述定位机构0070包括锁定结构和可转动的驱动体0072。所述驱动体0072上设置偏心凸轮和驱动杆0073。锁定结构包括锁定杆0074和连接所述锁定杆0074的复位弹簧,所述锁定杆0074的一端抵顶于所述偏心凸轮。所述旋转筒体连接有驱动板0013,所述驱动板0013沿周向设置多个配合槽0013a。在所述输送状态下,锁定杆0074脱离一所述配合槽0013a的状态下,所述驱动杆0073插入一所述配合槽0013a带动所述驱动板0013转动;在所述清洗状态下,所述驱动杆0073脱离一所述配合槽0013a时,所述锁定杆0074插入一所述配合槽0013a。
30.参见图4、图7和图8所示,组培瓶0190小型全自动清洗机还包括刷瓶装置0090,所述刷瓶装置0090包括多个伸缩瓶刷0091,各所述伸缩瓶刷0091沿所述旋转筒体的轴线方向依次设置,各所述伸缩瓶刷0091均向所述旋转筒体延伸。所述刷瓶装置0090具有伸长状态和回缩状态。在所述清洗状态下,所述伸缩瓶刷0091处于伸长状态,所述伸缩瓶刷0091延伸至位于所述瓶笼0011内的组培瓶0190内。在所述回缩状态下,所述伸缩瓶刷0091脱离瓶笼0011,处于回缩状态。
31.参见图7所示,所述冲洗组件还包括前部冲洗组件0100和后部冲洗组件0120。所述前部冲洗组件0100位于所述摆瓶输送轨道0020的底部,所述前部冲洗组件0100包括多个朝向相应的送料轨道槽0021的喷头。所述后部冲洗组件0120设置于所述中部冲洗组件0110和
所述翻瓶输出轨道0050之间,所述后部冲洗组件0120包括多个朝向所述清洗配合转筒0010的喷头。
32.参见图4所示,组培瓶0190小型全自动清洗机还包括弧形镂空轨道0080,所述弧形镂空轨道设置于所述清洗配合转筒0010的底部,且沿所述清洗配合转筒0010的圆周方向延伸。在组培瓶0190容纳于所述瓶笼0011的状态下,所述组培瓶的开口端抵顶于所述弧形镂空轨道0080。
33.参见图1所示,组培瓶0190小型全自动清洗机还包括中水存储箱0130和汇流盒0140,所述汇流盒0140设置于所述中水存储箱0130和所述清洗配合转筒0010之间。所述汇流盒0140包括集液口和排液口,所述集液口位于所述清洗配合转筒0010的底部,所述排液口连通所述中水存储箱0130。
34.组培瓶0190小型全自动清洗机包括进料翻瓶器0030,摆瓶输送轨道0020包括多个挡板0022,相邻两个挡板0022之间形成所述送料轨道槽0021,所述挡板0022包括平直输送段0022a和弧形翻转段0022b,所述进料翻瓶器0030设置于所述弧形翻转段0022b的一侧。组培瓶0190小型全自动清洗机还包括第一防护盖板0150和第二防护盖体0160,所述第一防护盖板0150和第二防护盖体0160,均具有打开状态和闭合状态。在所述闭合状态下,所述第一防护盖板0150覆盖各所述挡板0022的平直输送段0022a,所述第二防护盖体0160覆盖各所述挡板0022的弧形翻转段0022b。第一防护盖板0150和第二防护盖体0160起到防止夹手的作用,防止水流喷射和溅射出来,防止瓶体翻转时滑落出来,盖板还可以翻转开合方便及时排除卡瓶等故障。在设备运行过程中需扣合严密,若中途翻开“防护盖板”则设备发出报警声,同时停止运行,设备的“运行指示灯”由绿色常亮转为红色。
35.实施例二参见图1至图13所示,本技术实施例二在上述实施例1的基础上对组培瓶全自动清洗机进行进一步说明。摆瓶输送轨道0020上还设置有挡片0023,挡片0023围合形成安装缺口,倾斜振动台0040容纳于该安装缺口上,整个倾斜振动台0040略微倾斜。倾斜振动台0040可以水平左右往复、小范围、高频地震动,将组培瓶移动至送料轨道槽。
36.参见图3和图5所示,组培瓶全自动清洗机还包括进料翻瓶器0030,所述进料翻瓶器0030包括第一轴体0031和多个第一翻瓶部,各所述第一翻瓶部沿所述第一轴体0031的长度方向依次设置。在所述进料翻瓶器0030旋转过程中,能带动各所述第一翻瓶部分别拨动相应送料轨道槽0021内的组培瓶0190。
37.所述第一翻瓶部包括多个第一拨片0032,各所述第一拨片0032沿所述第一转轴的圆周方向依次间隔设置,所述第一拨片0032的厚度方向和第一轴体0031相平行。所述送料轨道槽0021底部设置镂空槽,所述第一拨片0032通过所述镂空槽伸入或伸出所述送料轨道槽0021。
38.可选的,所述第一翻瓶部包括三组第一拨片0032,所述第一拨片0032包括第一边0032a、第二边0032b和连接所述第一边0032a和第二边0032b的弧形边0032c,相邻的两个第一拨片0032中,一者的第一边0032a和另一者的第二边0032b夹角为90
°
,且在由第一边0032a端部向第二边0032b端部的方向上,弧形边0032c的曲率逐渐增大。
39.该实施方案中,第一拨片0032为扇叶式的拨片,通过三组第一挡片的设置,三组第一挡片旋转可带动翻瓶,且在翻瓶的时候挡住后边的瓶子。本技术中相邻的两个第一拨片
0032中,一者的第一边0032a和另一者的第二边0032b夹角为90
°
可容纳组培瓶0190。第一拨片0032设计为由第一边0032a端部向第二边0032b端部的方向上,弧形边0032c的曲率逐渐增大,从而在第一翻瓶部旋转过程中,被转运的组培瓶0190位于相邻两个第一拨片0032之间,随第一翻瓶部移动,位于该被转运的组培瓶0190后部的其他组培瓶0190则抵顶于弧形边0032c上,且缓慢前行。在第一翻瓶部旋转过程中,第一拨片0032不向后推后边的瓶子,避免了旋转阻力过大,造成电机被烧坏。
40.在一种可能的,所述旋转筒体沿周向设置有多个隔离板0012,各所述隔离板0012沿所述旋转筒的轴线方向延伸设置。相邻的两个隔离板0012之间设置一所述瓶体装载部。
41.该实施方案中,通过隔离板0012的设计,增强了清洗配合转筒0010的结构强度,且在冲洗及刷洗阶段,可防止液体顺流或水花飞溅至隔壁排瓶笼0011,污染已清洗干净的瓶体。
42.参见图6所示,在一种可能的实施方案中,组培瓶全自动清洗机还包括定位机构0070,所述定位机构0070用于在清洗配合转筒0010旋转过程中,间歇性地锁定所述清洗配合转筒0010,使得所述清洗配合转筒0010上各瓶体装载部依次暂停于清洗工位。方便组培瓶全自动清洗机的洗刷组件执行洗刷作业,且在当前瓶体装载部被清洗完毕时,定位机构0070驱动清洗配合转筒0010,使得下一瓶体装载部暂停于清洗工位,方便洗刷组件执行洗刷作业。
43.其中,定位机构0070包括电机、传动轮系0071、驱动体0072和锁定结构。电机0184和所述传动轮系0071传动连接,所述传动轮系0071和所述驱动体0072传动连接,所述驱动体0072和所述锁定结构传动配合。所述清洗配合转筒0010包括连接所述旋转筒体的驱动板0013。在所述驱动体0072旋转过程中,能驱动所述锁定结构交替地锁定和拨动所述驱动板0013。
44.所述驱动体0072上连接有驱动杆0073,所述驱动杆0073端部具有驱动轴。所述驱动体0072包括偏心凸轮,所述锁定结构包括锁定杆0074和连接所述锁定杆0074的复位弹簧,所述锁定杆0074具有铰接部和分设于铰接部两侧的第一杆体和第二杆体,在所述复位弹簧的作用下,所述第一杆体抵顶于所述偏心凸轮,所述第二杆体上设置锁定轴。所述驱动板0013沿周向设置多个配合槽0013a,所述偏心凸轮转动驱动所述第一杆体,带动第二杆体运动,使得锁定轴插入或滑出所述配合槽0013a。在所述锁定轴脱离一所述配合槽0013a的状态下,所述驱动轴插入一所述配合槽0013a带动所述驱动板0013转动。在所述锁定轴插入一所述配合槽0013a的状态下,所述驱动轴脱离一所述配合槽0013a。
45.参见图1所示,组培瓶全自动清洗机还包括出料翻瓶器0060,所述出料翻瓶器0060包括第二轴体和多个第二翻瓶部,各所述第二翻瓶部沿所述第二轴体的长度方向依次设置。在所述出料翻瓶器0060旋转过程中,能带动各所述第二翻瓶部分别拨动相应出料轨道槽0052内的组培瓶0190。其中,出料翻瓶器0060结构和进料翻瓶器0030相似,出料翻瓶器0060的具体结构可以参见进料翻瓶器0030的结构实施例三本技术实施例三在上述实施例的基础上,对组培瓶全自动清洗机进行进一步详细说明。该组培瓶全自动清洗机还包括组培瓶洗刷机构。组培瓶洗刷机构能够对组培瓶0190进行有效的清洗作业。
46.参见图4和图8所示,组培瓶洗刷机构包括刷瓶装置0090和中部冲洗组件0110,所述刷瓶装置0090包括多个伸缩瓶刷0091,各所述伸缩瓶刷0091沿所述旋转筒体的轴线方向依次设置,各所述伸缩瓶刷0091均向所述旋转筒体延伸。中部冲洗组件0110包括中部冲洗管和多个喷头,所述中部冲洗管沿所述旋转筒体的轴线方向延伸,各所述喷头沿所述中部冲洗管的长度方向依次连接于所述中部冲洗管,所述喷头均朝向所述旋转筒体。在刷洗状态下,各所述伸缩瓶刷0091分别伸入相应瓶笼0011内的组培瓶0190内,各喷头分别朝向相应组培瓶喷水。
47.所述刷瓶装置0090包括底座0092、伸缩部件0093和滑块0094,所述滑块0094可滑动地连接于所述底座0092,所述伸缩部件0093连接于所述底座0092,且所述伸缩部件0093和所述滑块0094传动连接。各所述伸缩瓶刷0091分别连接于所述滑块0094。伸缩部件0093伸缩运动带动各所述伸缩瓶刷0091伸缩运动。
48.伸缩瓶刷0091可以包括刷头0091a和杆体。刷头0091a与常见的烧杯刷类似,杆体的固定方式采用快拆式设计,方便更换。伸缩部件0093可以为液压推杆,推杆顶部与滑块0094连接,推动其水平往复运动。
49.刷瓶装置0090还可以包括远端限位开关和近端限位开关。远端限位开关和近端限位开关配合限定了伸缩瓶刷0091的伸缩范围。当伸缩部件0093或滑块0094触碰到“远端限位开关”时伸缩部件0093推出运动停止,此时刷头0091a刚好接触瓶底。当伸缩部件0093或滑块0094触碰到“近端限位开关”时伸缩部件0093收回运动停止,此时刷头0091a已离开瓶体且处于“弧形镂空轨道0080”之外。
50.在一种可能的实施方案中,组培瓶洗刷机构还包括旋转驱动装置,所述旋转驱动装置分别与各所述伸缩瓶刷0091传动连接,以驱动各所述伸缩瓶刷0091旋转以刷洗组培瓶0190的内壁。
51.参见图8所示,在一种可能的实施方案中,所述旋转驱动装置包括驱动部和多个穿套体0095,所述穿套体0095具有穿套槽和外齿圈0095a,所述穿套槽内壁具有沿其轴线方向延伸的凸部或凹部。各所述伸缩瓶刷0091分别连接于相应的穿套体0095,且所述伸缩瓶刷0091贯穿所述穿套槽设置,所述伸缩瓶刷0091具有沿长度方向的凹部或凸部,所述凹部和所述凸部插接配合。相邻的两个穿套体0095的外齿圈0095a相啮合,所述驱动部与任一所述穿套体0095传动连接,以驱动各所述伸缩瓶刷0091旋转。
52.参见图13所示,在一种可能的实施方案中,所述瓶笼0011内部设置有弹性滑动支撑体0011a和摩擦板0011b。组培瓶0190容纳于所述瓶笼0011内。在洗刷工位下,组培瓶0190的轴线和伸缩瓶刷0091的延长线具有一定倾斜角度。在伸缩瓶刷0091伸入相应组培瓶0190内的状态下,所述弹性滑动支撑体0011a被压缩,所述摩擦板0011b和组培瓶0190相接触,增加了摩擦力,组培瓶0190不易转动,能够被旋转的伸缩瓶刷0091有效的刷洗。在伸缩瓶刷0091脱离组培瓶0190的状态下,所述弹性滑动支撑体0011a弹性复位,所述摩擦板0011b和组培瓶0190具有间隙,方便组培瓶0190在脱离弧形镂空轨道后能够顺利滑出瓶笼。
53.可选的,组培瓶洗刷机构包括:前部冲洗组件0100。所述摆瓶输送轨道0020具有多个送料轨道槽0021,所述送料轨道槽0021底部设置镂空槽。所述前部冲洗组件0100位于所述摆瓶输送轨道0020的底部,所述前部冲洗组件0100包括多个喷头,各喷头分别朝向相应的送料轨道槽0021设置。
54.所述前部冲洗组件0100包括第一前冲洗管0101和第二前冲洗管0102。所述第一前冲洗管0101和第二前冲洗管0102上均设置多个喷头。所述第一前冲洗管0101和第二前冲洗管0102通过互锁式电磁水阀连接于第一母管。
55.前部冲洗组件0100为双排式布置,中间间隔一个瓶的距离,第一前冲洗管0101上设置集束水流喷射喷嘴,第二前冲洗管0102设置伞式水流喷射喷嘴。两排喷嘴的水流均为脉冲式喷出,交替供水形成脉冲,例如采用一进二出互锁式电磁水阀自动控制。集束式水流可将瓶底的整块培养基冲散脱落,伞式水流可将剩余的黏附在瓶壁上的培养基等冲洗下来。这种脉冲式水流喷射方式可提高水流冲洗能力并起到节水目的。
56.可选的,组培瓶洗刷机构还包括翻瓶输出轨道0050和后部冲洗组件0120,所述翻瓶输出轨道0050设置于清洗配合转筒0010背离所述摆瓶输送轨道0020的一侧,所述中部冲洗组件0110设置于所述摆瓶输送轨道0020和翻瓶输出轨道0050之间,所述后部冲洗组件0120设置于所述中部冲洗组件0110和所述翻瓶输出轨道0050之间。后部冲洗组件0120包括内部冲洗管0121和两个外部冲洗管0122,两个所述外部冲洗管0122分设于所述内部冲洗管0121的两侧,所述内部冲洗管0121和两个所述外部冲洗管0122上均设置多个喷头。所述内部冲洗管0121和所述外部冲洗管0122通过互锁式电磁水阀连接于第二母管。内部冲洗管0121和所述外部冲洗管0122由“一进二出互锁式电磁水阀”控制,外接自来水。其中,内部冲洗管0121上设置底喷头,底喷头为集束式脉冲水流,外部冲洗管0122设置侧喷头,为伞式脉冲水流,两种脉冲头交替供水形成脉冲,提高了清洗效率。
57.实施例四本技术实施例四在上述实施例的基础上对组培瓶全自动清洗机进行进一步详细说明。该组培瓶全自动清洗机构能够对废弃物进行处理。
58.具体的,组培瓶全自动清洗机包括:前部冲洗组件0100、集液盒0170和粉碎装置0180,所述前部冲洗组件0100位于所述摆瓶输送轨道0020的底部,所述前部冲洗组件0100包括多个喷头,各喷头分别朝向相应的送料轨道槽0021。参见图1和图10所示,集液盒0170具有位于所述摆瓶输送轨道0020底部的集液槽。所述粉碎装置0180和所述集液槽相连通,所述粉碎装置0180上连接有第一排污管道。本技术中的,通过在前部冲洗组件0100底部设置集液盒0170能够收集其上部滴落的废水及冲洗下来的培养基等固体杂物,并将所有废弃物汇流至底部一侧的出口端,通过粉碎装置0180进行粉碎,方便了排放。
59.参见图10所示,集液盒0170整体为盒状,四周竖直侧壁的上端贴合摆瓶输送轨道0020的下部边缘,底部呈漏斗状向一侧倾斜形成汇流槽,使废水和杂质依靠重力作用汇集至排出口。
60.参见图4和图10所示,在一种可能的实施方案中,所述前部冲洗组件0100包括冲洗管,所述冲洗管至少部分设置于所述集液盒0170内,各所述喷头均位于所述集液盒0170内,且连接于所述冲洗管。
61.具体的,所述前部冲洗组件0100包括第一前冲洗管0101和第二前冲洗管0102,所述第一前冲洗管0101和第二前冲洗管0102沿所述摆瓶输送轨道0020的长度方向依次设置,所述第一前冲洗管0101和第二前冲洗管0102均与所述送料轨道槽0021相垂直。所述第一前冲洗管0101和第二前冲洗管0102通过互锁式电磁水阀连接于第一母管。
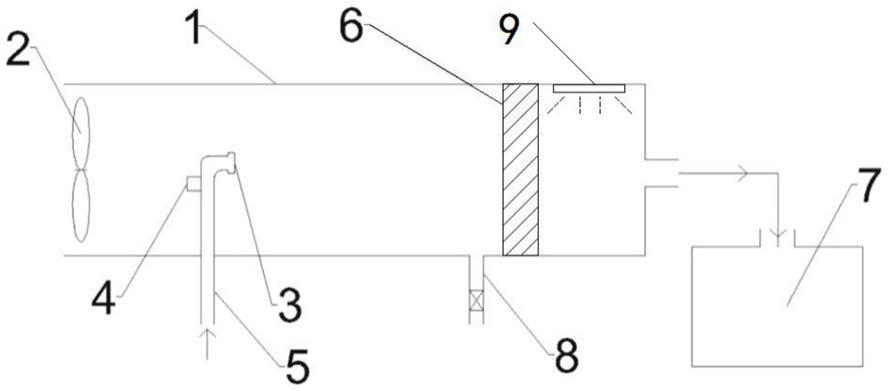
62.参见图9所示,所述粉碎装置0180包括筒体0181、固定研磨盘0182和粉碎组件,所
述筒体0181底部连接所述第一排污管道,所述固定研磨盘0182设置于所述筒体0181内,所述粉碎组件包括活动研磨盘0183、电机0184和传动轴0185,所述活动研磨盘0183设置于所述筒体0181内,所述传动轴0185一端连接所述活动研磨盘0183,另一端连接所述电机0184。
63.固定研磨盘0182上分布有一个或数圈通孔,是粉碎装置的固定端,周围一圈与筒内壁经卡槽固定,运行时二者间无相对运动。活动研磨盘0183上分布有一个或数圈通孔斜状通孔(各圈通孔距盘转动中心的距离与固定研磨盘0182上的一致,倾斜方向与其转动方向相反)是粉碎装置0180的移动端。该粉碎装置0180可使大块固体物经两磨盘的相对转动研磨为小块固体物,转动研磨盘上的倾斜通孔可对其下部产生一定的增压作用,加快固体物的研磨及废水的向下流动,运行时仅废水和小块固体物可通过两磨盘的通孔并进一步向下运动,可防止大块废弃物过多以堵塞排污管道,两种磨盘属于易损耗材,均为可拆卸式设计,方便更换。第一排污管道可将废液和内含的小颗粒固形物直接排放入城市污水管网,因没有大块固形物等,故持续性排放亦不会堵塞。
64.自动清洗机还包括转筒冲洗组件(如:中部冲洗组件和后部冲洗组件)和中水存储箱0130,转筒冲洗组件具有多个朝向所述清洗配合转筒0010的喷头,所述中水存储箱0130位于所述清洗配合转筒0010的底部,且通过复用管道连接于所述前部冲洗组件0100。为前部冲洗组件0100提供水源,达到节水的效果。
65.参见图10和图11所示,在一种可能的实施方案中,所述中水存储箱0130内设置滤网0131,所述滤网0131将所述中水存储箱0130分割为原液腔0132和过滤腔0133。所述中水存储箱0130和所述清洗配合转筒0010之间设置有汇流盒0140,所述汇流盒0140的排液口连通所述原液腔0132。所述过滤腔0133靠近所述滤网0131的一侧设置第一凹陷槽0134,所述第一凹陷槽0134内设置水泵0136,所述复用管道连接于所述水泵0136。
66.滤网0131可拆卸地连接于中水存储箱0130,滤网0131为方形具硬质边框均匀密布孔洞的薄板。中水存储箱0130两相对的侧壁上均设置有凹槽,滤网0131的硬质边框可沿凹槽插入并固定。
67.所述原液腔0132的壁面上边沿连接有溢流盒0137。所述原液腔0132和溢流盒0137均连通于第二排污管道。
68.所述原液腔0132靠近所述滤网0131的一侧设置第二凹陷槽0135,所述第二凹陷槽0135底部设置连通所述第二排污管道的排放口,所述排放口上设置有电磁阀。
69.参见图12所示,所述汇流盒0140的排液口两侧分别设置第一导流板0141和第二导流板0142,所述第一导流板0141位于靠近所述滤网0131的一侧,所述第二导流板0142位于远离所述滤网0131的一侧。所述第一导流板0141向背离所述滤网0131的一侧倾斜延伸,所述第二导流板0142延伸长度小于所述第一导流板0141的延伸长度。排液口前后收缩呈扁平状,第一导流板0141向背离所述滤网0131的一侧倾斜延伸,避免废液直接竖直冲击下部水体(防止搅动水体使沉淀的固体沉积物重新悬浮,方便阶段性排污时沉淀物及时排出;同时也降低了过滤网0131被堵塞的机率)。第二导流板0142延伸长度小于所述第一导流板0141的延伸长度可增大出水口大小,进一步降低中水在排液口的流速。
70.自动清洗机还具有液位检测器,液位检测器包括上水位检测探头、下水位检测探头和警戒水位检测探头,上水位检测探头布置高度略低于溢流盒0137的溢流口的水平高度。下水位检测探头位于中水存储箱0130的中间高度处;警戒水位检测探头布置高度略高
于水泵0136。原液腔0132和过滤腔0133在靠近过滤网侧的底部向下凹陷并向一端倾斜,由过滤网过滤下来的固体颗粒物汇集在此第二凹陷槽0135中;原液腔0132最低处向外开口并连接排污管,可直接排向城市污水管网,开口处由电磁阀控制开合,当中水存储箱中液面达到最高水位(上水位检测探头)时,电磁阀打开,存储箱中污水携带沉积在底部凹槽中的固体物排出,当液面降到适宜水位(下水位检测探头)时,电磁阀关闭,停止排放。原液腔0132的顶部一端还设置有溢流盒0137,溢流盒0137 的溢流口外侧连接至排污管,当上述过滤网堵塞或水位检测或电磁阀失效时,过多的水可通过溢流口排出。
71.以下对本技术组培瓶全自动清洗机的工作过程进行简要说明:组培瓶0190位于倾斜振动台0040上,且瓶口朝下。倾斜振动台0040处于振动状态,倾斜振动台0040上的组培瓶0190在倾斜振动台0040的振动下依次进入各送料轨道槽0021,此时,清洗配合转筒0010处于静止状态,而进料翻瓶器0030处于旋转状态,进料翻瓶器0030旋转一定角度将一组组培瓶0190拨动至一瓶体装载部的各瓶笼0011内。此时第一卡瓶检测器开启检测是是否卡瓶,若是,则全自动清洗机开始报警,否则判断未卡瓶,定位机构0070驱动清洗配合转筒0010旋转至下一工位(即组培瓶洗刷机构对应的位置)并停止,此时组培瓶洗刷机构开始执行洗刷作业,进料翻瓶器0030继续旋转将另一组培瓶0190拨动至下一瓶体装载部的各瓶笼0011。在洗刷作业执行完毕且第一卡瓶检测器未检测到卡瓶故障时,清洗配合转筒0010继续旋转一定角度至下一工位(即组培瓶后部冲洗组件对应的位置)并停止,此时内部冲洗管0121和外部冲洗管0122交替喷水,同时后续瓶体装载部所在工位继续翻瓶入瓶笼0011或洗刷。其中,清洗配合转筒0010的交替的旋转和暂停控制通过定位机构0070控制。如图1所示,清洗配合转筒0010沿逆时针方向旋转,在清洗配合转筒0010上组培瓶0190的瓶口向外,在组培瓶0190口部朝下时,瓶口抵顶于弧形镂空轨道0080上而不会掉落。在清洗配合转筒0010旋转至组培瓶0190脱离弧形镂空轨道0080时,在重力作用下,组培瓶0190脱离瓶笼0011进入各出料轨道槽0052,并在出料翻瓶器0060的拨动下进入台面0051上,此时组培瓶0190瓶口朝下进行控水。在组培瓶0190输出过程中,第二卡瓶检测器检测是否有卡瓶故障,并在检测到卡瓶故障时,发出警报,控制清洗配合转筒0010暂停旋转。
72.在组培瓶全自动清洗机运行过程中,前部冲洗组件0100对摆瓶输送轨道0020上开口朝下的组培瓶0190进行粗洗去除瓶底培养基等固体杂物,而在清洗配合转筒0010旋转过程中,中部冲洗组件0110和后部冲洗组件0120还依次对组培瓶0190进行清洗,从而提高了清洗效果。
73.以上所述仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专利的技术人员在不脱离本发明技术方案范围内,当可利用上述提示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。