技术特征:
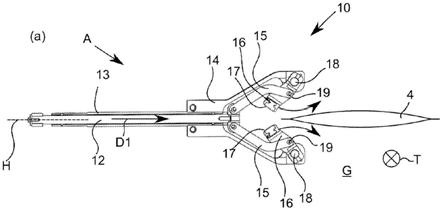
1.一种拉伸单元(10),用于在流动包装机(11)中夹紧和拉伸管状薄膜(4),所述拉伸单元(10)包括:-夹持头(14);-两个联接杆(15),附接到移动装置(12);-两个夹持手指(16),每个夹持手指(16)附接到所述夹持头(14)和一个联接杆(15);其特征在于,通过平行于所述移动装置(12)的中心轴线(h)在所述夹持头(14)与所述移动装置(12)之间的相对线性移动,所述夹持手指(16)从远程位置(a)移动至夹紧位置(c)。2.根据权利要求1或权利要求1的前序部分所述的拉伸单元(10),其特征在于,所述夹持手指(16)通过所述夹持手指(16)的旋转移动从远程位置(a)移动到夹紧位置(c)。3.根据前述权利要求中的一项所述的拉伸单元(10),其中每个夹持手指(16)通过第一枢轴点(18)附接到所述夹持头(14),并且每个夹持手指(16)通过第二枢轴点(19)附接到所述联接杆(16),其中所述夹持头(14)与所述移动装置(12)之间的相对线性移动导致所述夹持手指(16)的旋转移动。4.根据前述权利要求中的一项所述的拉伸单元(10),其中所述移动装置(12)附接到第一驱动装置(21),其中所述第一驱动装置(21)优选为气压缸。5.根据前述权利要求中的一项所述的拉伸单元(10),其中所述夹持头(14)与第二驱动装置(20)连接,其中所述第二驱动装置(20)优选为电动马达,更优选为线性马达,甚至更优选为线性伺服马达。6.根据前述权利要求中的一项所述的拉伸单元(10),其中所述移动装置(12)被设置为从动杆,和/或其中所述夹持头(14)经由另一移动装置(13)附接到所述第二驱动装置(20),其中所述另一移动装置(13)优选为管,所述管优选地被布置成与所述移动装置(12)平行并且至少部分地与所述移动装置(12)同轴。7.根据前述权利要求中的一项所述的拉伸单元(10),其中所述移动装置(12)沿着所述移动装置(12)的中心轴线(h)的移动由机械止动件(22)限制。8.一种流动包装机(1),包括根据前述权利要求中的一项所述的拉伸单元(10)。9.一种用于在流动包装机(1)中利用拉伸单元(10)夹紧和拉伸管状薄膜(4)的方法,所述拉伸单元(10)优选为根据前述权利要求中的一项所述,其中-在第一步骤中,所述拉伸单元(10)的移动装置(12)相对于所述拉伸单元(10)的夹持头(14)在第一方向(d1)上移动,优选地朝向所述管状薄膜(4),从而将夹持手指(16)从远程位置(a)移动到中间位置(b);-在第二步骤中,所述夹持头(14)相对于所述移动装置(12)在与所述第一方向(d1)相反的第二方向(d2)上移动,从而将所述夹持手指(16)从所述中间位置(b)移动到夹紧位置(c),从而夹紧所述管状薄膜(4);其中,通过所述夹持头(14)在所述第二方向(d2)上的进一步移动来拉伸所述管状薄膜(4)。10.一种用于在流动包装机(1)中利用拉伸单元(10)夹紧和拉伸管状薄膜(4)的方法,所述拉伸单元(10)优选为根据权利要求1至8中的一项所述,
其中-在第一步骤中,所述夹持手指(16)在与所述管状薄膜(4)的输送方向(t)正交的夹持平面(g)中朝向彼此从远程位置(a)旋转到中间位置(b);-在第二步骤中,所述夹持手指(16)在所述夹持平面(g)中朝向彼此从所述中间位置(b)旋转到夹紧位置(c),其中所述管状薄膜(4)被夹持在所述夹持手指(16)之间,其中所述夹持手指(16)在所述夹持平面(g)中线性移动以拉伸被夹持的所述管状薄膜(4)。11.根据权利要求9或10所述的方法,其中在所述远程位置(a)和所述中间位置(b)中,所述管状薄膜(4)未被夹持在所述夹持手指(16)之间。12.根据权利要求9至11中的一项所述的方法,其中所述夹持手指(16)在所述夹持平面(g)中的旋转和所述拉伸由所述夹持头(14)与所述移动装置(12)之间的与所述移动装置(12)的中心轴线(h)平行的相对移动引起。13.根据权利要求9至12中的一项所述的方法,其中所述夹持头(14)通过电动马达、线性马达、更优选地通过线性伺服马达移动,和/或其中,所述移动装置(12)通过气压缸移动。14.根据权利要求13所述的方法,其中根据所述管状薄膜(4)的材料性质和/或几何形状来控制所述电动马达和/或所述线性马达和/或所述线性伺服马达的驱动力。15.根据权利要求9至14中的一项所述的方法,其中在所述第二步骤中,所述夹持头(14)在所述第二方向(d2)上的移动被限制,其中,优选地通过所述电动马达和/或所述线性马达和/或所述线性伺服马达的路径设置来限制所述夹持头(14)在所述第二方向(d2)上的移动。16.根据权利要求9至14中的一项所述的方法,其中在第二步骤中,所述夹持头(14)的移动被限制。17.根据权利要求16所述的方法,其中所述夹持头在所述第二方向(d2)上的移动被限制。18.根据权利要求16或17所述的方法,其中所述移动受到所述电动马达和/或所述线性马达和/或所述线性伺服马达的最大力/转矩设置的限制。
技术总结
提出了一种用于在流动包装机(11)中夹紧和拉伸管状薄膜(4)的拉伸单元(10),拉伸单元(10)包括:-夹持头(14);-两个联接杆(15),附接到移动装置(12);-两个夹持手指(16),每个夹持手指(16)附接到夹持头(14)和一个联接杆(15);其特征在于,通过平行于移动装置(12)的中心轴线(H)在夹持头(14)与移动装置(12)之间的相对线性移动,夹持手指(16)从远程位置(A)移动至夹紧位置(C)。此外,还提出了用于夹紧和拉伸管状薄膜(4)的拉伸单元(10)、流动包装机(1)以及方法。方法。方法。
技术研发人员:布鲁诺
受保护的技术使用者:GEA食品策划韦尔特公司
技术研发日:2020.09.09
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。