1.本发明涉及搬运机器人技术领域,特别是一种货物转运机器人及其转运方法。
背景技术:
2.目前物流搬运、装载机器人一般以电动叉车为主,可在规划好的路线和区域内对货物进行自主搬运、装卸工作。然而传统的叉车或电动叉车存在以下缺陷:(1)体积大,所需操作空间较大,不适宜场地空间有限或货物堆积较密集的区域作业;(2)叉车叉运货物,需要货物具有一定强度的外箱保护,才不至于在转运、装卸过程中由于操作过失而损毁,这样就易导致设备维护、货物需要外箱保护而产生较高的运营成本;(3)叉车一次只能搬运一件货物,转运效率低,维护成本高;(4)装卸过程中需要有人工进行辅助,不能完全实现自动化。
技术实现要素:
3.本发明的目的是克服现有技术的上述不足而提供一种运营成本低,工作效率高,自动化程度强,安全可靠的货物转运机器人及其转运方法。
4.本发明的技术方案是:本发明之一种货物转运机器人,包括:转运车,包括车本体、主臂、副臂和滑轨装置,车本体的两侧均设有主臂和副臂,车本体依次与主臂、副臂、滑轨装置通过旋转轴连接,各旋转轴均依靠相应电机转动;且滑轨装置处的旋转轴始终保持水平姿态,主臂和副臂能够360
°
范围内自由转动;所述滑轨装置包括滑轨座、设于滑轨座内的电动齿轮组件以及伸缩杆;伸缩杆包括连成一体的滑杆以及带有条形齿轮的锯齿杆;滑轨座内的电动齿轮组件带动两根杆体同时水平移动;转运架,包括货架,货架的底部两侧分别设有沿货架宽度方向延伸的套管,通过将滑杆伸入套管内,由电动齿轮组件带动锯齿杆和滑杆共同移动,进而带动货架水平移动;拖板车,通过连接桥与转运车活动连接;所述转运车经车本体、主臂、副臂和滑轨装置将转运架移至拖板车上。
5.进一步,所述套管的底部设有向下延伸出的连接柱;货架的四个边角侧设有连接杆,连接杆的端部设有连接孔;当多个转运架需要堆叠时,一转运架的连接柱插入另一转运架的连接孔内固定。
6.进一步,所述货架的底部设有托板,托板的底部设有磁性板,所述拖板车上设有相对应的磁性板;货架的套管上侧设有红外激光接收器,滑轨座上设有与红外激光接收器相对应设置的红外激光发生器。
7.进一步,所述货架的磁性板一侧设有卡板,所述拖板车在于卡板相对应的位置设有卡孔,卡板与卡孔卡合固定;所述货架的外部设有三面或四面防护网。
8.进一步,所述滑轨座的一侧和套管的一侧均设有滑槽,所述滑槽均开设于滑杆与锯齿杆相交合的位置;即滑轨座在与滑杆相对的那一侧设有滑槽,所述滑杆伸入套管内,套
管在与锯齿杆相对的那一面也设有滑槽。
9.进一步,所述连接柱与连接孔之间设有光电传感器,光电传感器包括相对应设置的发射器和接收器,发射器设于连接柱的一侧,接收器设于连接杆的一侧。
10.进一步,所述连接桥在与转运车和拖板车的连接处设有四个卡件,相邻两个卡件之间呈v型设置,相邻两个卡件与另外两个卡件之间设有连接筋,两个卡件与转运车的底盘转轴连接,另外两个卡件与拖板车的底盘转轴连接,连接筋上设有可拆卸结构;连接桥的卡件一端为弧形,使得连接桥可能够进行5~10
°
的转动微调。
11.本发明之根据前述任一项所述货物转运机器人的转运方法,包括以下步骤:s1:将转运车与拖板车连接成一体,并将若干货物放置于转运架内;s2:控制转运车的旋转臂转动,使副臂上的伸缩杆对准伸入转运架上的套管内。
12.s3:控制转运车的主臂转动,带动转运架及货物旋转,副臂调整伸缩杆始终处于水平姿态;s4:当主臂转动至竖直位置时,滑轨装置将转运架水平推至拖板车一侧;即电动齿轮组件带动滑杆与锯齿杆共同移动,带动转运架水平移动至拖板车的那一侧;s5:控制转运车的旋转臂转动至水平位置,滑轨装置将转运架推至拖板车上;s6:拖板车和转运架上的磁性板对应相吸,卡板落入卡孔内,实现对转运架的固定;s7:滑轨装置将伸缩杆从套管内抽出,并收纳至初始位;s8:转运车继续将下一轮的货物及转运架移动至拖板车,重复以上工作完成卸货;s9:当需要运输多个转运架时,上层转运架的连接柱通过插入下层转运架的连接孔内,实现多层货物的堆叠。
13.进一步,s2~s5具体包括:滑轨装置上的红外激光发生器发射激光,由转运架上的红外激光接收器接收,使套管与滑杆对准,之后由副臂电机控制副臂转动,且滑轨装置处的旋转轴始终保持水平姿态,从而带动滑杆伸入套管内;然后主臂电机带动主臂与车本体之间的旋转轴转动,使主臂向上移动,而副臂与主臂之间的旋转轴以及副臂与滑轨装置之间的旋转轴则由不同的电机控制,保证在主臂向上移动的过程中,伸缩杆始终处于水平姿态;当主臂到达竖直位置后,滑轨装置将转运架水平推至拖板车一侧;之后主臂电机带动主臂与车本体之间的旋转轴转动,使主臂向下移动,而副臂与主臂之间的旋转轴以及副臂与滑轨装置之间的旋转轴则由不同的电机控制,保证在主臂向下移动的过程中,伸缩杆始终处于水平姿态,从而将转运架推至拖板车上。
14.本发明的有益效果:(1)转运、装卸过程中不需要人工干预,完全实现智能化装卸和堆叠;(2)通过红外激光对准,通过主臂、副臂和滑轨装置配合,以及通过滑轨装置的伸缩杆与转运架的套管对接,既能够实现转运车与转运架直接无缝对接,又能轻松实现转运架的水平转移;(3)通过设置转运架取代传统的运输箱,一方面可以重复使用,并能够进行稳定的堆叠;另一方面,货物可以随意放置在转运架内,无需进行硬质外包装保护,节省运营成本;(4)滑轨装置使整个装卸过程无需多次移动或调整转运车的姿态,即可完成工作,大大提高工作效率,且结构简单,占地面积小;
(5)转运架与拖板车上设有多层保护和稳定结构,有效确保货物装卸安全。
附图说明
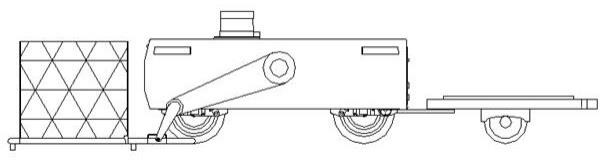
15.图1是本发明实施例转运车的结构示意图;图2是本发明实施例转运车与拖板车的连接结构示意图;图3是本发明实施例转运车与转运架的连接结构示意图;图4是图2所示实施例的仰视图;图5是本发明实施例伸缩杆与套管的连接状态示意图;图6是本发明实施例滑轨座的结构示意图;图7是本发明实施例滑轨装置的结构示意图;图8是本发明实施例转运架的结构示意图;图9是图10所示实施例的仰视图;图10是本发明实施例转运方法中的步骤s101的状态示意图;图11是本发明实施例转运方法中的步骤s102的状态示意图;图12是本发明实施例转运方法中的步骤s104的状态示意图;图13是本发明实施例转运方法中的步骤s105的状态示意图;图14是本发明实施例转运方法中的步骤s106的状态示意图;图15是本发明实施例转运方法中的步骤s107的状态示意图;图16是本发明实施例转运方法中的步骤s109的状态示意图。
16.附图标识说明:1.转运车;2.拖板车;3.转运架;4.连接桥;5.防撞角;6.防撞胶条;7.滑槽;8.磁性板;11.车本体;12.主臂;13.副臂;14.滑轨装置;15.激光雷达;16.摄像头;17.警示灯;18.四轮四驱;21.车身;22.万向轮;23.卡孔;31.货架;32.套管;33.连接柱;34.连接杆;35.连接孔;36.托板;37. 红外激光接收器;38. 防护网;39.卡板;41.卡件;42.连接筋;141.滑轨座;142.红外激光发生器;143.电动齿轮组件;144.滑杆;145.锯齿杆;146.副臂连接孔。
具体实施方式
17.以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
18.如图1~图3所示:一种货物转运机器人,包括转运车1、拖板车2和转运架3,转运车1通过连接桥4与拖板车2活动连接,转运架3与转运车1活动连接,转运车1通过转运架3转运和装卸货物。
19.如图1和图4所示:本实施例中,转运车1包括车本体11、主臂12、副臂13和滑轨装置14。车本体的上部设有激光雷达15,后侧设有摄像头16,侧面设有警示灯17,由于激光雷达、摄像头、警示灯均为现有技术,此处不再赘述。车本体11的两侧均设有主臂12和副臂13,主臂和副臂组成联动旋转臂,车本体11依次与主臂12、副臂13、滑轨装置14通过旋转轴连接,各旋转轴均依靠各电机转动、控制器控制转动角度。其中滑轨装置14处的旋转轴始终保持水平姿态,主臂12和副臂13可进行360
°
自由转动。车本体1的边角处设有防撞角5,侧边设有防撞胶条6,车本体11的四轮四驱18可以实现原地转向,进一步节省了操作空间,适用范围更广。
20.如图5~图7所示:滑轨装置14包括滑轨座141、红外激光发生器142、设于滑轨座内的电动齿轮组件143以及伸缩杆。其中,伸缩杆由两根杆体相连组成,一根为光滑的滑杆144,另一根为带有条形齿轮的锯齿杆145。电动齿轮组件143包括齿轮组以及控制齿轮组转动的滑轨电机,齿轮组的相应齿轮与锯齿杆145上的条形齿轮相啮合,通过滑轨电机控制齿轮转动,带动锯齿杆145水平移动,而锯齿杆145与滑杆144连成一体,因此,滑杆144也进行水平移动。滑轨座141在与滑杆144相对的那一侧设有滑槽7,且滑槽7开设于滑杆与锯齿杆相交合的位置,这是由于滑杆与锯齿杆连成一体,当锯齿杆伸入滑轨座内后,滑槽7的设置能够不阻碍滑杆与锯齿杆共同移动。红外激光发生器142设于滑轨座141的上侧。滑轨座141上设有副臂连接孔146,以便于连接旋转轴。
21.如图8和图9所示:本实施例中,转运架3包括货架31,货架31的底部两侧分别设有沿货架宽度方向延伸的套管32,设置套管32是为了将滑轨装置的滑杆144伸入套管内。当滑杆144伸入套管32后,可通过滑轨电机控制齿轮转动,带动滑杆与锯齿杆共同移动,进而带动货架水平移动。套管在与锯齿杆相对的那一面也设有滑槽7。套管32的底部设有向下延伸出的连接柱33;货架的四个边角侧设有连接杆34,连接杆34的端部设有连接孔35,连接孔可以是连接杆通过设计成空心管形成,也可以是在连接杆上单独设置连接孔。连接柱33与连接孔35之间设有光电传感器,光电传感器包括相对应设置的发射器和接收器,例如发射器设于连接柱的一侧,接收器设于连接杆的一侧,当多个转运架3需要堆叠时,转运架a的连接柱通过光电传感器找准转运架b的连接孔位置,从而自动插入转运架b设在连接杆端部的连接孔内,起到支撑和固定的作用。货架31的底部设有托板36,托板36的底部设有两块间隔设置的磁性板8,磁性板8用于与拖板车2上的磁性板8对应设置。货架的套管32上侧设有红外激光接收器37,与滑轨装置上的红外激光发生器142相对应设置,以确保滑轨装置14的滑杆准确伸入套管内。货架31的外部设有三面或四面防护网38,起到保护转运架3内的货物在转运、装卸过程中不掉落的作用。两块磁性板8之间连接有卡板39,用于与拖板车2上的卡孔23对应相扣,实现拖板车2对转运架3的稳定和固定作用。
22.如图2所示:本实施例中,拖板车2包括车身21、设于车身底部的两个万向轮22以及设于车身上表面的磁性板8和卡孔23,卡孔23设于磁性板8的后侧,拖板车2的磁性板与转运架上的磁性板(弱磁性,主要起到稳定作用)对应相吸,拖板车2上的卡孔23与转运架3上的卡板39尺寸相匹配设置,通过将卡板39插入卡孔23内,实现拖板车2与转运架3的稳固连接。转运车1通过连接桥4与拖板车2活动连接。连接桥4在与转运车和拖板车的连接处设有四个卡件41,相邻两个卡件之间呈v型设置,相邻两个卡件与另外两个卡件之间设有连接筋42,两个卡件与转运车的底盘转轴连接,另外两个卡件与拖板车的底盘转轴连接,当无需拖板车时可以将连接桥拆除,即连接筋上可以设置拆卸结构,如卡接或者螺纹连接,当拆卸时,从连接筋侧拆开即可。连接桥的卡件一端具有一定的弧度,使得连接桥可以进行5~10
°
的转动微调,以缓解车辆转弯时造成的应力影响。
23.本实施例的转运方法,包括以下步骤:s101:将转运车与拖板车连接成一体,并将若干货物放置于转运架内。
24.具体地,如图10所示:将转运车通过连接桥与拖板车连接,而转运架脱离转运车设置,且将所需的货物放进转运架的货架内。
25.s102:控制转运车的旋转臂转动,使副臂上的伸缩杆通过激光对准伸入转运架上
的套管内。
26.具体地,如图11所示:滑轨装置上的红外激光发生器发射激光,由货架上的红外激光接收器接收,实现套管与滑杆的对准,之后由副臂电机控制副臂转动,且滑轨装置处的旋转轴始终保持水平姿态,从而带动滑杆伸入套管内。
27.s103:控制转运车的主臂转动,带动转运架及货物旋转,副臂调整伸缩杆始终处于水平姿态。
28.具体地,主臂电机带动主臂与车本体之间的旋转轴转动,使主臂向上移动,而副臂与主臂之间的旋转轴以及副臂与滑轨装置之间的旋转轴则由不同的电机控制,保证在主臂向上移动的过程中,伸缩杆始终处于水平姿态,防止转运架失衡。
29.s104:当主臂转动至竖直位置时,滑轨装置将转运架水平推至拖板车一侧。
30.具体地,如图12所示:当主臂到达竖直位置后,此时的转运架位于转运车的左侧,即远离拖板车的那一侧,为了使转运架转移至拖板车那一侧,则通过滑轨电机控制齿轮转动,带动滑杆与锯齿杆共同移动,而滑轨座不动,那么伸缩杆就会向右侧移动,从而带动转运架水平移动至右侧,即拖板车的那一侧。移动至目标位置后滑轨电机停止动作。
31.s105:控制转运车的旋转臂转动至水平位置,滑轨装置将转运架推至拖板车上。
32.具体地,如图13所示:主臂电机带动主臂与车本体之间的旋转轴转动,使主臂向下移动,而副臂与主臂之间的旋转轴以及副臂与滑轨装置之间的旋转轴则由不同的电机控制,保证在主臂向下移动的过程中,伸缩杆始终处于水平姿态,从而将转运架推至拖板车上。
33.s106:拖板车和转运架上的磁性板对应相吸,卡板落入卡孔内,实现对转运架的固定,保证转运架在转运过程中不晃动、跌落,如图14所示。
34.s107:滑轨装置抽出伸缩杆,并收纳到初始位,如图15所示。
35.s108:转运车继续将下一轮的货物及转运架移动到卸货点,重复以上工作完成卸货。
36.s109:当需要运输多个转运架时,通过连接柱侧的光电传感器,上层转运架的连接柱可以准确落入下层转运架的连接孔内,实现多层货物的堆叠,如图16所示。
37.综上所述,本发明一方面能够实现转运车与转运架直接无缝对接,又能轻松实现转运架的水平转移,整个装卸过程无需多次移动或调整转运车的姿态,即可完成工作,大大提高工作效率;另一方面,货物可以随意放置在转运架内,无需进行硬质外包装保护,节省运营成本,且货物装卸安全可靠。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。