1.本发明涉及一种机器人,尤其涉及一种用于拆卸架空地板螺丝的机器人。
背景技术:
2.开放式办公室常用架空地板做地面基层,在办公室改造时,涉及大面积的螺丝拆卸作业。目前,缺乏可用于拆卸架空地板螺丝的自动装置,仍需要通过人工作业完成,拆卸地面螺丝需要采用蹲姿或者跪姿,工作强度大,不利于持久作业,还容易产生螺丝散落的问题。
3.现有技术的机械设备中不乏一些能够通过自动旋拧实现螺丝拆装的工具,但其操作仍需要人工控制,且在进行地面螺丝拆卸时不可避免的需要下蹲,虽然通过工具辅助能一定程度上提高螺丝拆卸效率,但工作强度仍然较大,无法实现地板螺丝的自动化拆卸。
4.现有技术中将多关节式机械手应用于固定式拆螺丝机器人上,但多关节式机械手自重大,关节摆动时惯性大,需要配置坚固稳定的基座,不适合移动式拆卸,使用灵活性、通用性较差,且成本较高。
技术实现要素:
5.本发明的目的在于提供一种用于拆卸架空地板螺丝的机器人,能实现所需拆卸螺丝的位置识别和自动移动,并能自动拆卸和回收螺丝。
6.本发明是这样实现的:
7.一种用于拆卸架空地板螺丝的机器人,包括移动平台组件、拆螺丝组件、显示组件、电源和控制装置;移动平台组件包括移动式平台、外壳和第一拍摄器,外壳罩盖安装在移动式平台上,外壳与移动式平台之间形成底部镂空的安装腔体,第一拍摄器可转动式安装在外壳顶部;拆螺丝组件、电源和控制装置安装在安装腔体内,显示组件嵌装在外壳的表面;拆螺丝组件包括螺丝收纳盒、磁力批头、批头控制组件和第二拍摄器,磁力批头通过批头控制组件可移动式设置在安装腔体内且能通过镂空部位伸至移动式平台下方;第一拍摄器的输出端和第二拍摄器的输出端分别与控制装置的输入端连接,控制装置的输出端与批头控制组件的输入端、移动式平台的输入端和显示组件的输入端连接;电源与移动平台组件、拆螺丝组件、显示组件和控制装置电连接。
8.所述的移动式平台包括车架和万向轮,车架为中部镂空的矩形框架结构,批头控制组件、电源和控制装置分别设置在车架上,外壳安装在车架上并罩盖批头控制组件;若干个万向轮分别通过驱动器安装在车架的外边缘处,每个万向轮的驱动器的输入端均与控制装置的输出端连接,且每个万向轮均配有锁止器。
9.所述的批头控制组件包括三轴垂直坐标机械手和电批;三轴垂直坐标机械手设置在车架上且位于镂空部位上方,电批设置在三轴垂直坐标机械手上并能通过三轴垂直坐标机械手沿三轴方向移动;磁力批头安装在电批的输出端,磁力批头能通过三轴垂直坐标机械手下降并贯穿车架的镂空部位。
10.所述的三轴垂直坐标机械手包括一对x轴连杆、y轴连杆和z轴连杆;一对x轴连杆分别设置在车架的顶部两侧,y轴连杆通过导轨可移动式连接在一对x轴连杆之间,z轴连杆通过导轨可移动式安装在y轴连杆上,电批通过导轨可升降式安装在z轴连杆上;第二拍摄器设置在其中一根x轴连杆上并面向车架的镂空部位,第二拍摄器上设有第二照明灯。
11.所述的第一拍摄器包括旋转云台和第一照明灯;旋转云台安装在外壳上,第一拍摄器通过旋转云台可转动式安装在外壳的上方;第一照明灯设置在旋转云台上,第一照明灯位于第一拍摄器的旁侧且与第一拍摄器同步转动。
12.所述的显示组件包括显示屏和指示灯带,显示屏嵌装在外壳的顶面上,指示灯带嵌装在外壳的侧面上。
13.本发明与现有技术相比,具有如下有益效果:
14.1、本发明由于设有移动平台组件、三轴垂直坐标机械手和控制组件,能通过第一拍摄器拍摄的所有螺丝组的所在位置确定粗略的移动路径,并通过第二拍摄器拍摄的螺丝所在位置确定精确的拆卸路径,用于规划螺丝的拆卸顺序,同时通过万向轮和三轴移动控制实现螺丝定位,用于辅助架空地板螺丝的拆卸,提高了螺丝拆卸的自动化程度,也提高了移动的效率和定位拆卸的准确度、良率。
15.2、本发明由于设有电批和磁力批头,能自动旋拧拆卸螺丝,同时将螺丝通过磁力吸附并送至螺丝收纳盒,避免了螺丝散落的问题,无需人工下蹲拆卸螺丝,大大降低了螺丝拆卸的工作量。
附图说明
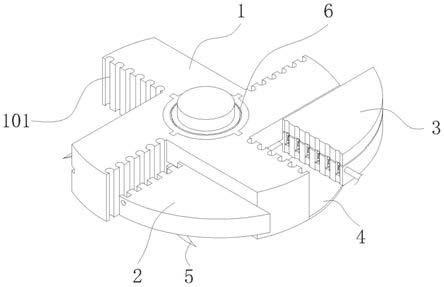
16.图1是本发明用于拆卸架空地板螺丝的机器人的立体图;
17.图2是本发明用于拆卸架空地板螺丝的机器人的内部结构示意图;
18.图3是本发明用于拆卸架空地板螺丝的机器人中批头控制组件的结构示意图;
19.图4是本发明用于拆卸架空地板螺丝的机器人的螺丝回收示意图;
20.图5是本发明用于拆卸架空地板螺丝的机器人中第二拍摄器拍摄的螺丝组照片。
21.图中,1移动平台组件,11车架,12万向轮,13外壳,14第一拍摄器,141旋转云台,142第一照明灯,2拆螺丝组件,21螺丝收纳盒,22三轴垂直坐标机械手,221x轴连杆,222y轴连杆,223z轴连杆,23电批,24磁力批头,25第二拍摄器,3显示组件,31显示屏,32指示灯带,4电源,5控制装置,6架空地板,7螺丝。
具体实施方式
22.下面结合附图和具体实施例对本发明作进一步说明。
23.请参见附图1和附图2,一种用于拆卸架空地板螺丝的机器人,包括移动平台组件1、拆螺丝组件2、显示组件3、电源4和控制装置5;移动平台组件1包括移动式平台、外壳13和第一拍摄器14,外壳13罩盖安装在移动式平台上,外壳13与移动式平台之间形成底部镂空的安装腔体,第一拍摄器14可转动式安装在外壳13顶部;拆螺丝组件2、电源4和控制装置5安装在安装腔体内,显示组件3嵌装在外壳13的表面;拆螺丝组件2包括螺丝收纳盒21、磁力批头24、批头控制组件和第二拍摄器25,磁力批头24通过批头控制组件可移动式设置在安装腔体内且能通过镂空部位伸至移动式平台下方;第一拍摄器14的输出端和第二拍摄器25
的输出端分别与控制装置5的输入端连接,控制装置5的输出端与批头控制组件的输入端、移动式平台的输入端和显示组件3的输入端连接;电源4与移动平台组件1、拆螺丝组件2、显示组件3和控制装置5电连接。第一拍摄器14和第二拍摄器25可采用现有技术的摄像头等视觉识别设备,用于采集架空地板的地板照片并发送至控制装置5,控制装置5可采用现有技术的计算机设备,用于识别地板照片上的螺丝组位置并生成相应的移动路径。控制装置5控制移动式平台沿移动路径移动,移动式平台移动至螺丝上方时,第二拍摄器25拍摄螺丝组照片并发送至控制装置5,控制装置5识别螺丝组照片上的螺丝位置并生成相应的拆卸路径。控制装置5控制批头控制组件带动磁力批头24移动至螺丝处并旋拧拆卸螺丝,控制装置5控制批头控制组件带动磁力批头24将拆卸的螺丝吸附并送至螺丝收纳盒21。
24.请参见附图1和附图2,所述的移动式平台包括车架11和万向轮12,车架11为中部镂空的矩形框架结构,批头控制组件、电源4和控制装置5分别设置在车架11上,外壳13安装在车架11上并罩盖批头控制组件;若干个万向轮12分别通过驱动器(图中未示出)安装在车架11的外边缘处,每个万向轮12的驱动器的输入端均与控制装置5的输出端连接,且每个万向轮12均配有锁止器(图中未示出)。驱动器可采用现有技术的轮轴驱动电机和轮轴,便于万向轮12的安装、驱动控制和转向控制,确保万向轮12能带动车架11沿移动路径和拆卸路径移动,此处不再控制。
25.请参见附图1,所述的第一拍摄器14包括旋转云台141和第一照明灯142;旋转云台141安装在外壳13上,第一拍摄器14通过旋转云台141可转动式安装在外壳13的上方;第一照明灯142设置在旋转云台141上,第一照明灯142位于第一拍摄器14的旁侧且与第一拍摄器14同步转动。旋转云台141可采用现有技术的摄像云台并通过垂直向的转轴控制第一拍摄器14在水平面内转动,确保第一拍摄器14拍摄的清晰、稳定,拍摄光线不佳时可通过第一照明灯142补光。第一照明灯142可采用现有技术的led灯等照明设备。
26.请参见附图2,所述的批头控制组件包括三轴垂直坐标机械手22和电批23;三轴垂直坐标机械手22设置在车架11上且位于镂空部位上方,电批23设置在三轴垂直坐标机械手22上并能通过三轴垂直坐标机械手22沿三轴方向移动;磁力批头24安装在电批23的输出端,磁力批头24能通过三轴垂直坐标机械手22下降并贯穿车架11的镂空部位。三轴垂直坐标机械手22能实现三轴垂直移动,三轴垂直坐标机械手22的工作区域位于镂空部位上方,便于电批23对螺丝的拆卸操作。
27.请参见附图3,所述的三轴垂直坐标机械手22包括一对x轴连杆221、y轴连杆222和z轴连杆223;一对x轴连杆221分别设置在车架11的顶部两侧,y轴连杆222通过导轨可移动式连接在一对x轴连杆221之间,z轴连杆223通过导轨可移动式安装在y轴连杆222上,电批23通过导轨可升降式安装在z轴连杆223上;第二拍摄器25设置在其中一根x轴连杆221上并面向车架11的镂空部位,第二拍摄器25上设有第二照明灯(图中未示出)。y轴连杆222能沿一对x轴连杆221水平移动,实现x轴向的位置调节,z轴连杆223能沿y轴连杆222水平移动,实现y轴向的位置调节,电批23能沿z轴连杆223上下移动,实现电批23的高度控制,从而实现磁力批头24与螺丝的对位、接触和拆卸。第二照明灯可采用现有技术的led灯等照明设备,用于拍摄时补光。
28.请参见附图1,所述的显示组件3包括显示屏31和指示灯带32,显示屏31嵌装在外壳13的顶面上,指示灯带32嵌装在外壳13的侧面上。显示屏31能用于显示移动路径、拆卸路
径、拆卸进度等工作状态,指示灯带32能用于显示故障状态、通断电等工作状态。
29.本发明用于拆卸架空地板螺丝的机器人用于拆卸架空地板螺丝的使用方法是:
30.1、通常架空地板6为矩形地板拼接构成,每相邻四块矩形地板的边角处均由一个螺丝7,四个螺丝7构成一组螺丝组。将该机器人放置于待拆卸螺丝的架空地板6上,第一拍摄器14通过旋转云台141垂直向的转轴旋转,第一拍摄器14拍摄机器人四周的地面图像并发送至控制装置5,控制装置5处理该地面图像,识别架空地板6上的螺丝并获取所有的螺丝组在地面图像上的坐标,根据所有螺丝组的坐标生成机器人的移动路径。
31.2、控制装置5控制万向轮12的驱动器带动车架11按生成的移动路径开始移动,使三轴垂直坐标机械手22的作业区域覆盖第一组所需拆卸的螺丝组,控制装置5控制万向轮12的锁止片锁定万向轮12,将机器人定位在架空地板6上。
32.3、第二拍摄器25拍摄第一组所需拆卸的螺丝组,并将螺丝组照片发送至控制装置5,控制装置5识别四个螺丝7并获取四个螺丝7在螺丝组照片上的坐标,控制装置5根据四个螺丝7的坐标生成拆卸顺序和拆卸路径。
33.4、控制装置5控制三轴垂直坐标机械手22驱动y轴连杆222沿x轴连杆221水平移动,驱动z轴连杆223沿y轴连杆222水平移动,驱动电批23沿z轴连杆223下降,使磁力批头24移动至第一个所需拆卸的螺丝7的正上方。三轴垂直坐标机械手22具有体积小、重量轻、控制难度低、成本低等特点,能满足架空地板6上螺丝7的拆卸要求。
34.5、磁力批头24继续下降至与螺丝7接触并达到预设的预压量,通过电批23驱动磁力批头24顺时针缓慢旋转进入螺丝7的拧动槽,完成对位。
35.6、电批23驱动磁力批头24逆时针旋转,同时三轴垂直坐标机械手22带动电批23沿z轴连杆223上升,控制装置5控制磁力批头24通电产生磁力并吸附螺丝7,实现该螺丝7的拆卸。
36.7、控制装置5控制三轴垂直坐标机械手22带动磁力批头24和所吸附的螺丝7移动至螺丝收纳盒21的上方,磁力批头24断电,磁力消失使螺丝7掉入螺丝收纳盒21中,完成螺丝7的回收。
37.8、按拆卸路径,重复步骤4至步骤7,直至完成该螺丝组的拆卸和回收。
38.9、按移动路径,重复步骤2至步骤8,直至完成所有螺丝组的拆卸和回收。
39.以上仅为本发明的较佳实施例而已,并非用于限定发明的保护范围,因此,凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。