1.本发明涉及防倾倒路桩领域,尤其涉及一种基于大数据的障碍物预警巡检机器人。
背景技术:
2.当道路上具有坑洼或掉落有大体积物体时,如不进行及时处理,则会严重影响车辆或路人的安全,由于部分坑洼或掉落有大体积物体无法及时处理完,需要耗费一定的时间,现有解决方式通常都会放置一些路桩来警示他人,让车辆或行人临时避障。
3.同时道路的坑洼或掉落有大体积物体的地段存在不可确定性,因此需要沿着道路巡检,目前道路上的巡检主要靠人工,人工巡检的方式效率低,对于一些条件差的道路环境,人员工作环境非常艰苦,且现有的道路巡检机器人在进行日常的道路巡检时,在遇到紧急的情况只能通过远程通讯装置通知工作人员,而无法及时的对紧急的情况处理,对危险物体进行隔离,易造成了人员的伤害,并且现有的隔离桩在大风天气时易被风吹倒,难以起到警示和隔离的作用。
技术实现要素:
4.为了克服现有的道路巡检机器人,在遇到紧急的情况只能通过远程通讯装置通知工作人员,而无法及时的对紧急的情况处理,对危险物体进行隔离,易造成了人员的伤害,并且现有的隔离桩在大风天气时易被风吹倒,难以起到警示和隔离的作用的缺点,本发明提供一种基于大数据的障碍物预警巡检机器人。
5.本发明的技术方案是:一种基于大数据的障碍物预警巡检机器人,包括有夹持系统、智能小车和防倾倒路桩;智能小车右部连接有夹持系统;夹持系统上放置有四个防倾倒路桩;防倾倒路桩包括有支撑系统、拉伸系统和警戒带;支撑系统上部连接有拉伸系统;拉伸系统内部连接有警戒带;四个防倾倒路桩依次通过警戒带相连接;夹持系统用于夹持和放置防倾倒路桩;支撑系统用于支撑拉伸系统。
6.进一步的,夹持系统包括有第一连接板、放置架、第一电动滑轨、第一电动滑块、第二连接板、第二电动滑轨、第二电动滑块、电动推杆和电动夹爪;智能小车右部固接有第一连接板;第一连接板右部固接有放置架;放置架上开设有四个放置槽,放置槽用于放置防倾倒路桩;第一连接板上表面固接有第一电动滑轨;第一电动滑轨外表面滑动连接有第一电动滑块;第一电动滑块上表面固接有第二连接板;第二连接板上表面固接有第二电动滑轨;第二电动滑轨外表面滑动连接有第二电动滑块;第二电动滑块右部固接有电动推杆;电动推杆伸缩端固接有电动夹爪。
7.进一步的,支撑系统包括有底座、配重块、第一连接杆和支撑组件;底座内部滑动连接有第一连接杆;第一连接杆下表面固接有配重块;配重块与底座相接触,并且配重块位于底座的内部;底座内部连接有四个环形阵列的支撑组件;配重块上表面与四个支撑组件相连接;第一连接杆外表面与四个支撑组件相连接。
8.进一步的,底座内部环形等距开有四个通口槽。
9.进一步的,底座外表面环形等距开有四个第一槽口,并且每个第一槽口上均开有两个第一滑槽;四个第一槽口用于对支撑组件进行收纳。
10.进一步的,位于右方的支撑组件包括有第一转轴、第一支撑板、防滑垫、第一连接块、第一钢绳、卡块、第二钢绳和滑轮组;底座内部转动连接有第一转轴;第一转轴外表面固接有第一支撑板;第一支撑板下表面固接有防滑垫;第一支撑板上表面固接有第一连接块;底座的通口槽上固接有滑轮组;第一连接块内部连接有第一钢绳;第一钢绳外表面与滑轮组相接触;第一钢绳远离第一连接块的一端与配重块进行固接;底座上的两个第一滑槽上滑动连接有卡块;卡块上表面固接有两个第二钢绳;两个第二钢绳外表面与滑轮组相接触;两个第二钢绳远离卡块的一端与第一连接杆进行固接;第一连接杆与拉伸系统相连接,第一钢绳处于松弛状态,第一支撑板开有避开卡块的避空槽。
11.进一步的,拉伸系统包括有支撑杆、第二连接杆、第一齿条、第一连接环、第二滑块、警示灯、收卷组件和锁定组件;底座上表面固接有支撑杆;支撑杆内部与第一连接杆进行滑动连接;支撑杆上表面固接有警示灯;支撑杆外表面转动连接有第二连接杆;第二连接杆外表面前部固接有第一齿条;第二连接杆外表面左部和右部各开有第二滑槽;两个第二滑槽内部各滑动连接有一个第二滑块;两个第二滑块相背侧固接有第一连接环;第一连接环外表面前部和外表面后部各连接有一个收卷组件;第一连接环连接有两个锁定组件;锁定组件用于锁定收卷组件。
12.进一步的,位于前方的收卷组件包括有第二连接环、第二支撑板、第一滑轨、万向球头、弹性件、第二连接块、第二转轴、收卷器和导向板;第一连接环外表面前部固接有第二连接环;第二连接环上部和下部各固接有一个第二支撑板;两个第二支撑板与第一连接环进行固接;两个第二支撑板上各固接有一个第一滑轨,并且两个第一滑轨为上下对称分布;两个第二支撑板纸中部各开有一个第二槽口;两个第二槽口内各固接有两个弹性件;上方的两个弹性件相向侧固接有一个第二连接块;下方的两个弹性件相向侧固接有另一个第二连接块;两个第二连接块内部各转动连接有一个第二转轴;上方的第二转轴上表面和下方的第二转轴下表面各固接有一个万向球头;两个万向球头与两个第一滑轨进行滑动连接;第二转轴外表面固接有收卷器;第二连接环前部通过转动杆转动连接有两个导向板,并且两个导向板呈左右对称分布;两个导向板与警戒带进行接触,警戒带收卷在收卷器中。
13.进一步的,用于锁定前方的收卷组件的锁定组件包括有棘轮、第二齿条、限位杆、第一滑块、第三齿条、直齿轮、支撑架、拨动板、第三连接块和扭力弹簧;位于前方的收卷器上表面固接有棘轮;位于前上方的第二支撑板下表面右部滑动连接有第二齿条;位于前上方的第二支撑板下表面左部滑动连接有第三齿条;位于前上方的第二支撑板通过转动杆转动连接有直齿轮;直齿轮与第二齿条相啮合;直齿轮与第三齿条相啮合;第二齿条后部固接有第一滑块;第一滑块与位于前上方的第二支撑板进行滑动连接;第一滑块下表面固接有限位杆,并且限位杆位于棘轮的后方;第一连接环上表面固接有支撑架;支撑架内部通过转动杆转动连接有拨动板;拨动板外表面左部和外表面右部各固接有一个扭力弹簧;两个扭力弹簧远离拨动板的一侧与支撑架进行固接;第三齿条后部固接有第三连接块;第三连接块后部与拨动板进行固接。
14.进一步的,棘轮上的齿内部设置有弹簧,用于在挤压时进行回缩。
配重块,303-第一连接杆,304-第一转轴,305-第一支撑板,305a-避空槽,306-防滑垫,307-第一连接块,308-第一钢绳,309-卡块,310-第二钢绳,311-滑轮组,401-支撑杆,402-第二连接杆,403-第一齿条,404-第一连接环,405-第二连接环,406-第二支撑板,407-第一滑轨,408-万向球头,409-弹性件,410-第二连接块,411-第二转轴,412-收卷器,413-棘轮,414-第二齿条,415-限位杆,416-第一滑块,417-第三齿条,418-直齿轮,419-支撑架,420-拨动板,421-第三连接块,422-扭力弹簧,423-第二滑块,424-导向板,425-警示灯,202a-放置槽,301a-通口槽,301b-第一槽口,301c-第一滑槽,402a-第二滑槽,406a-第二槽口。
具体实施方式
18.以下结合附图和具体实施例对本发明作具体的介绍。
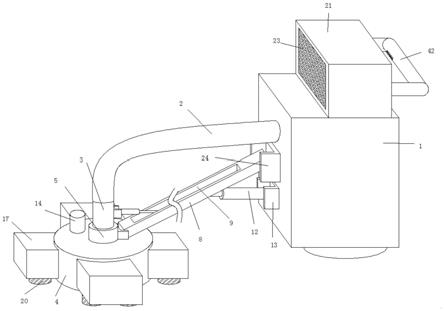
19.实施例1一种基于大数据的障碍物预警巡检机器人,如图1-4所示,包括有夹持系统1、智能小车4和防倾倒路桩;智能小车4右部连接有夹持系统1;夹持系统1上放置有四个防倾倒路桩;防倾倒路桩包括有支撑系统2、拉伸系统3和警戒带5;支撑系统2上部连接有拉伸系统3;拉伸系统3内部连接有警戒带5;四个防倾倒路桩依次通过警戒带5相连接。
20.在使用基于大数据的障碍物预警巡检机器人时,智能小车4内设有物体识别传感器,智能移动模块,当发现有需要隔离的物体,即发现有坑洼或掉落有大体积物体时,智能小车4控制夹持系统1将第一个防倾倒路桩取出,放置在需要隔离的物体旁,当第一个防倾倒路桩接触到路面时,防倾倒路桩上的支撑系统2自动展开进行支撑,然后智能小车4移动至需要隔离的物体另一个位置将第二个防倾倒路桩取出,并放置在需要隔离的物体旁,同时第一个防倾倒路桩的拉伸系统3通过警戒带5与第二个防倾倒路桩的拉伸系统3相连,并且防倾倒路桩上的拉伸系统3与支撑系统2配合,用于降低中心,防止在放置第二个防倾倒路桩时彼此拉扯,导致第一个防倾倒路桩发生倾倒,随后重复上述步骤依次将剩余的防倾倒路桩放置在需要隔离的物体周围,对需要隔离的物体进行隔离,当放置完成后,智能小车4控制夹持系统1依次将四个防倾倒路桩上的拉伸系统3向上推动,拉伸系统3移动带动警戒带5向上移动,使警戒带5处于拉伸系统3的高处便于行人或车辆观察。
21.实施例2在实施例1的基础上,如图1和图5-15所示,夹持系统1包括有第一连接板201、放置架202、第一电动滑轨203、第一电动滑块204、第二连接板205、第二电动滑轨206、第二电动滑块207、电动推杆208和电动夹爪209;智能小车4右部螺栓连接有第一连接板201;第一连接板201右部固接有放置架202;放置架202上开设有四个放置槽202a,放置槽202a用于放置防倾倒路桩;第一连接板201上表面固接有第一电动滑轨203;第一电动滑轨203外表面滑动连接有第一电动滑块204;第一电动滑块204上表面固接有第二连接板205;第二连接板205上表面固接有第二电动滑轨206;第二电动滑轨206外表面滑动连接有第二电动滑块207;第二电动滑块207右部固接有电动推杆208;电动推杆208伸缩端固接有电动夹爪209。
22.首先,操作人员启动巡检机器人,让巡检机器人在室外进行巡检工作,当巡检时检测到需要隔离的物体时,控制第一电动滑轨203上的第一电动滑块204向前移动,第一电动滑块204移动带动第二连接板205向前移动,第二连接板205移动带动第二电动滑轨206向前移动,第二电动滑轨206向前移动带动第二电动滑块207向前移动,当第一电动滑块204移动
至第一个防倾倒路桩的位置时,控制第二电动滑块207向下移动,第二电动滑块207移动带动电动推杆208向下移动,然后控制电动推杆208伸端向前移动,电动推杆208伸端向前移动带动电动夹爪209向前移动,同时控制电动夹爪209张开,电动夹爪209向前移动过程中与第一个防倾倒路桩进行接触,然后控制电动夹爪209收缩对第一个防倾倒路桩进行夹持,然后控制第二电动滑轨206上的第二电动滑块207向上移动,进而第二电动滑块207带动电动夹爪209向上移动,电动夹爪209向上移动带动第一个防倾倒路桩向上移动,进而第一个防倾倒路桩脱离放置架202的限制,然后电动推杆208伸缩端继续向右移动,将第一个防倾倒路桩送出,然后控制第二电动滑轨206上的第二电动滑块207向下移动,将防倾倒路桩放置在地面上,然后如上述步骤依次将剩余的防倾倒路桩放置好,对需要隔离的物体进行隔离。
23.支撑系统2包括有底座301、配重块302、第一连接杆303和支撑组件;底座301内部滑动连接有第一连接杆303;第一连接杆303下表面固接有配重块302;配重块302与底座301相接触,并且配重块302位于底座301的内部;底座301内部连接有四个环形阵列的支撑组件;配重块302上表面与四个支撑组件相连接;第一连接杆303外表面与四个支撑组件相连接。
24.底座301内部环形等距开有四个通口槽301a。
25.底座301外表面环形等距开有四个第一槽口301b,并且每个第一槽口301b上均开有两个第一滑槽301c;四个第一槽口301b用于对支撑组件进行收纳。
26.位于右方的支撑组件包括有第一转轴304、第一支撑板305、防滑垫306、第一连接块307、第一钢绳308、卡块309、第二钢绳310和滑轮组311;底座301内部转动连接有第一转轴304;第一转轴304外表面固接有第一支撑板305;第一支撑板305下表面固接有防滑垫306;第一支撑板305上表面固接有第一连接块307;底座301的通口槽301a上固接有滑轮组311;第一连接块307内部连接有第一钢绳308;第一钢绳308外表面与滑轮组311相接触;第一钢绳308远离第一连接块307的一端与配重块302进行固接;底座301上的两个第一滑槽301c上滑动连接有卡块309;卡块309上表面固接有两个第二钢绳310;两个第二钢绳310外表面与滑轮组311相接触;两个第二钢绳310远离卡块309的一端与第一连接杆303进行固接;第一连接杆303与拉伸系统3相连接,第一钢绳308处于松弛状态,第一支撑板305开有避开卡块309的避空槽305a。
27.当夹持系统1将防倾倒路桩放至在路面时,配重块302与路面接触,进而配重块302向上移动,配重块302移动带动第一连接杆303向上移动,进而取消对第一钢绳308和第二钢绳310的拉扯,即第一支撑板305受重力的影响,通过第一转轴304在底座301上由上向下翻转,第一支撑板305翻转带动防滑垫306由上向下翻转,进而防滑垫306与地面接触,由于卡块309一开始位于避空槽305a中,随后卡块309在底座301上的第一滑槽301c向下滑动,在滑动的过程中卡块309与第一支撑板305接触,进而卡块309对第一支撑板305进行限位,防止第一支撑板305受到风力的吹拂发生倾倒,如此实了自动展开第一支撑板305对防倾倒路桩进行支撑,当在回收防倾倒路桩时,控制夹持系统1将防倾倒路桩夹持时,受配重块302重力的影响,配重块302带动第一钢绳308和第二钢绳310与其连接的一端向下移动,由于第一钢绳308此时处于松弛状态,进而第二钢绳310先向上拉扯卡块309,使卡块309向上移动取消对第一支撑板305的限位,然后在第一钢绳308的带动下第一支撑板305由下向上翻转,如图三所示,进行回缩,同时第一支撑板305上设置的避空槽305a宽度大于卡块309,防止第一支
撑板305在复位时与卡块309发生干涉,如此完成对防倾倒路桩的回收,当夹持系统1将防倾倒路桩放置在放置架202上时,配重块302卡入至放置槽202a内,使得防倾倒路桩能够稳当的放置在放置架202上。
28.拉伸系统3包括有支撑杆401、第二连接杆402、第一齿条403、第一连接环404、第二滑块423、警示灯425、收卷组件和锁定组件;底座301上表面固接有支撑杆401;支撑杆401内部与第一连接杆303进行滑动连接;支撑杆401上表面固接有警示灯425;支撑杆401外表面转动连接有第二连接杆402;第二连接杆402外表面前部固接有第一齿条403;第二连接杆402外表面左部和右部各开有第二滑槽402a;两个第二滑槽402a内部各滑动连接有一个第二滑块423;两个第二滑块423相背侧固接有第一连接环404;第一连接环404外表面前部和外表面后部各连接有一个收卷组件;第一连接环404连接有两个锁定组件;锁定组件用于锁定收卷组件。
29.位于前方的收卷组件包括有第二连接环405、第二支撑板406、第一滑轨407、万向球头408、弹性件409、第二连接块410、第二转轴411、收卷器412和导向板424;第一连接环404外表面前部固接有第二连接环405;第二连接环405上部和下部各固接有一个第二支撑板406;两个第二支撑板406与第一连接环404进行固接;两个第二支撑板406上各固接有一个第一滑轨407,并且两个第一滑轨407为上下对称分布;两个第二支撑板406纸中部各开有一个第二槽口406a;两个第二槽口406a内各固接有两个弹性件409;上方的两个弹性件409相向侧固接有一个第二连接块410;下方的两个弹性件409相向侧固接有另一个第二连接块410;两个第二连接块410内部各转动连接有一个第二转轴411;上方的第二转轴411上表面和下方的第二转轴411下表面各固接有一个万向球头408;两个万向球头408与两个第一滑轨407进行滑动连接;第二转轴411外表面固接有收卷器412;第二连接环405前部通过转动杆转动连接有两个导向板424,并且两个导向板424呈左右对称分布;两个导向板424与警戒带5进行接触,警戒带5收卷在收卷器412中。
30.用于锁定前方的收卷组件的锁定组件包括有棘轮413、第二齿条414、限位杆415、第一滑块416、第三齿条417、直齿轮418、支撑架419、拨动板420、第三连接块421和扭力弹簧422;位于前方的收卷器412上表面固接有棘轮413;位于前上方的第二支撑板406下表面右部滑动连接有第二齿条414;位于前上方的第二支撑板406下表面左部滑动连接有第三齿条417;位于前上方的第二支撑板406通过转动杆转动连接有直齿轮418;直齿轮418与第二齿条414相啮合;直齿轮418与第三齿条417相啮合;第二齿条414后部固接有第一滑块416;第一滑块416与位于前上方的第二支撑板406进行滑动连接;第一滑块416下表面固接有限位杆415,并且限位杆415位于棘轮413的后方;第一连接环404上表面固接有支撑架419;支撑架419内部通过转动杆转动连接有拨动板420;拨动板420外表面左部和外表面右部各固接有一个扭力弹簧422;两个扭力弹簧422远离拨动板420的一侧与支撑架419进行固接;第三齿条417后部固接有第三连接块421;第三连接块421后部与拨动板420进行固接。
31.棘轮413上的齿内部设置有弹簧,用于在挤压时进行回缩。
32.在放置防倾倒路桩时,需要将防倾倒路桩上的锁定组件进行解锁,从而使得警戒带5能够从拉伸系统3中拉出,使得防倾倒路桩能够顺利放置,即夹持系统1中的电动夹爪209,夹持第二连接杆402的外表面将第一个防倾倒路桩放置在地面时,将拨动板420一起夹持,进而以从右往左看为基准,前方的拨动板420在支撑架419上的转动杆上顺时针转动,拨
动板420转动拉动扭力弹簧422,同时拨动板420转动带动第三连接块421向前移动,第三连接块421移动带动第三齿条417向前移动,以从上往下看为基准,第三齿条417移动带动与之啮合的直齿轮418逆时针转动,直齿轮418转动带动第二齿条414向后移动,第二齿条414移动带动第一滑块416在第二支撑板406上向后滑动,第一滑块416滑动带动限位杆415向后滑动,进而限位杆415与棘轮413脱离,如此完成对路桩上的锁定组件进行解锁,进而警戒带5能够从拉伸系统3中拉出,使得防倾倒路桩能够顺利放置,当警戒带5从拉伸系统3中拉出时,以从上往下看为基准,警戒带5带动前方收卷器412逆时针转动,收卷器412转动带动警戒带5能够从收卷器412上顺利的拉扯出,同时收卷器412转动带动第二转轴411在第二连接块410上转动,第二转轴411转动带动万向球头408在第一滑轨407上转动,同时,收卷器412转动带动棘轮413逆时针转动,当防倾倒路桩放置在地面后,电动夹爪209取消对第二连接杆402和拨动板420的夹持,进而在扭力弹簧422回缩的作用下,带动拨动板420进行复位,拨动板420转动带动第二齿条414、限位杆415、第一滑块416、第三齿条417、直齿轮418和第三连接块421进行复位,进而限位杆415复位与棘轮413接触,从而棘轮413进行锁定,使警戒带5不能从收卷器412中拉出以此进行固定,防止受大风的影响警戒带5发生卷曲和乱晃的现象;如上述步骤,夹持系统1中的电动夹爪209依次将剩余的防倾倒路桩放置在地面,将需要隔离的物体进行隔离,当四个防倾倒路桩都放置在地面后,控制夹持系统1中电动夹爪209移动至第二连接环405的下方,然后控制夹持系统1中电动夹爪209向上移动,电动夹爪209移动带动收卷组件和锁定组件向上移动,即带动拨动板420向上移动,在移动的过程中拨动板420下部与第一齿条403进行接触,由于第一齿条403中的齿为斜向上倾斜,同时受扭力弹簧422的作用,拨动板420在移动过程中,卡入至第一齿条403中,进而当拨动板420移动至第二连接杆402顶部后,拨动板420卡入至第一齿条403中进行锁定,防止收卷组件向下掉落,同时在移动的过程中,由于每次只移动一个防倾倒路桩的收卷组件和锁定组件,进而警戒带5一端的更高,另一端更低,进而警戒带5带动收卷器412发生倾斜,收卷器412倾斜带动第二转轴411发生倾斜,第二转轴411倾斜带动万向球头408在第一滑轨407上滑动,如此防止警戒带5处于一端高另一端低状态时发生卷曲,同时在第二转轴411倾斜时压缩弹性件409,当电动夹爪209移动将四个防倾倒路桩的收卷组件和锁定组件向上移动后,弹性件409回弹带动第二转轴411进行复位,同时在受导向板424的夹持作用下,使警戒带5保持直立状态,便于行人观察。
33.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。