技术特征:
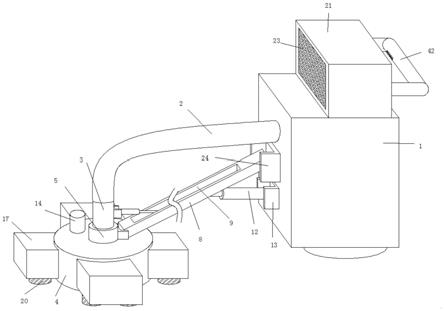
1.一种基于大数据的障碍物预警巡检机器人,包括有智能小车(4),其特征在于:还包括有夹持系统(1)和防倾倒路桩;智能小车(4)右部连接有夹持系统(1);夹持系统(1)上放置有四个防倾倒路桩;防倾倒路桩包括有支撑系统(2)、拉伸系统(3)和警戒带(5);支撑系统(2)上部连接有拉伸系统(3);拉伸系统(3)内部连接有警戒带(5);四个防倾倒路桩依次通过警戒带(5)相连接;夹持系统(1)用于夹持和放置防倾倒路桩;支撑系统(2)用于支撑拉伸系统(3)。2.根据权利要求1所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:夹持系统(1)包括有第一连接板(201)、放置架(202)、第一电动滑轨(203)、第一电动滑块(204)、第二连接板(205)、第二电动滑轨(206)、第二电动滑块(207)、电动推杆(208)和电动夹爪(209);智能小车(4)右部固接有第一连接板(201);第一连接板(201)右部固接有放置架(202);放置架(202)上开设有四个放置槽(202a),放置槽(202a)用于放置防倾倒路桩;第一连接板(201)上表面固接有第一电动滑轨(203);第一电动滑轨(203)外表面滑动连接有第一电动滑块(204);第一电动滑块(204)上表面固接有第二连接板(205);第二连接板(205)上表面固接有第二电动滑轨(206);第二电动滑轨(206)外表面滑动连接有第二电动滑块(207);第二电动滑块(207)右部固接有电动推杆(208);电动推杆(208)伸缩端固接有电动夹爪(209)。3.根据权利要求2所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:支撑系统(2)包括有底座(301)、配重块(302)、第一连接杆(303)和支撑组件;底座(301)内部滑动连接有第一连接杆(303);第一连接杆(303)下表面固接有配重块(302);配重块(302)与底座(301)相接触,并且配重块(302)位于底座(301)的内部;底座(301)内部连接有四个环形阵列的支撑组件;配重块(302)上表面与四个支撑组件相连接;第一连接杆(303)外表面与四个支撑组件相连接。4.根据权利要求3所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:底座(301)内部环形等距开有四个通口槽(301a)。5.根据权利要求3所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:底座(301)外表面环形等距开有四个第一槽口(301b),并且每个第一槽口(301b)上均开有两个第一滑槽(301c);四个第一槽口(301b)用于对支撑组件进行收纳。6.根据权利要求3所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:位于右方的支撑组件包括有第一转轴(304)、第一支撑板(305)、防滑垫(306)、第一连接块(307)、第一钢绳(308)、卡块(309)、第二钢绳(310)和滑轮组(311);底座(301)内部转动连接有第一转轴(304);第一转轴(304)外表面固接有第一支撑板(305);第一支撑板(305)下表面固接有防滑垫(306);第一支撑板(305)上表面固接有第一连接块(307);底座(301)的通口槽(301a)上固接有滑轮组(311);第一连接块(307)内部连接有第一钢绳(308);第一钢绳(308)外表面与滑轮组(311)相接触;第一钢绳(308)远离第一连接块(307)的一端与配重块(302)进行固接;底座(301)上的两个第一滑槽(301c)上滑动连接有卡块(309);卡块(309)上表面固接有两个第二钢绳(310);两个第二钢绳(310)外表面与滑轮组(311)相接触;两个第二钢绳(310)远离卡块(309)的一端与第一连接杆(303)进行固接;第一连接杆(303)与拉伸系统(3)相连接,第一钢绳(308)处于松弛状态,第一支撑板(305)开有避开卡块(309)的避空槽(305a)。
7.根据权利要求6所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:拉伸系统(3)包括有支撑杆(401)、第二连接杆(402)、第一齿条(403)、第一连接环(404)、第二滑块(423)、警示灯(425)、收卷组件和锁定组件;底座(301)上表面固接有支撑杆(401);支撑杆(401)内部与第一连接杆(303)进行滑动连接;支撑杆(401)上表面固接有警示灯(425);支撑杆(401)外表面转动连接有第二连接杆(402);第二连接杆(402)外表面前部固接有第一齿条(403);第二连接杆(402)外表面左部和右部各开有第二滑槽(402a);两个第二滑槽(402a)内部各滑动连接有一个第二滑块(423);两个第二滑块(423)相背侧固接有第一连接环(404);第一连接环(404)外表面前部和外表面后部各连接有一个收卷组件;第一连接环(404)连接有两个锁定组件;锁定组件用于锁定收卷组件。8.根据权利要求7所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:位于前方的收卷组件包括有第二连接环(405)、第二支撑板(406)、第一滑轨(407)、万向球头(408)、弹性件(409)、第二连接块(410)、第二转轴(411)、收卷器(412)和导向板(424);第一连接环(404)外表面前部固接有第二连接环(405);第二连接环(405)上部和下部各固接有一个第二支撑板(406);两个第二支撑板(406)与第一连接环(404)进行固接;两个第二支撑板(406)上各固接有一个第一滑轨(407),并且两个第一滑轨(407)为上下对称分布;两个第二支撑板(406)纸中部各开有一个第二槽口(406a);两个第二槽口(406a)内各固接有两个弹性件(409);上方的两个弹性件(409)相向侧固接有一个第二连接块(410);下方的两个弹性件(409)相向侧固接有另一个第二连接块(410);两个第二连接块(410)内部各转动连接有一个第二转轴(411);上方的第二转轴(411)上表面和下方的第二转轴(411)下表面各固接有一个万向球头(408);两个万向球头(408)与两个第一滑轨(407)进行滑动连接;第二转轴(411)外表面固接有收卷器(412);第二连接环(405)前部通过转动杆转动连接有两个导向板(424),并且两个导向板(424)呈左右对称分布;两个导向板(424)与警戒带(5)进行接触,警戒带(5)收卷在收卷器(412)中。9.根据权利要求8所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:用于锁定前方的收卷组件的锁定组件包括有棘轮(413)、第二齿条(414)、限位杆(415)、第一滑块(416)、第三齿条(417)、直齿轮(418)、支撑架(419)、拨动板(420)、第三连接块(421)和扭力弹簧(422);位于前方的收卷器(412)上表面固接有棘轮(413);位于前上方的第二支撑板(406)下表面右部滑动连接有第二齿条(414);位于前上方的第二支撑板(406)下表面左部滑动连接有第三齿条(417);位于前上方的第二支撑板(406)通过转动杆转动连接有直齿轮(418);直齿轮(418)与第二齿条(414)相啮合;直齿轮(418)与第三齿条(417)相啮合;第二齿条(414)后部固接有第一滑块(416);第一滑块(416)与位于前上方的第二支撑板(406)进行滑动连接;第一滑块(416)下表面固接有限位杆(415),并且限位杆(415)位于棘轮(413)的后方;第一连接环(404)上表面固接有支撑架(419);支撑架(419)内部通过转动杆转动连接有拨动板(420);拨动板(420)外表面左部和外表面右部各固接有一个扭力弹簧(422);两个扭力弹簧(422)远离拨动板(420)的一侧与支撑架(419)进行固接;第三齿条(417)后部固接有第三连接块(421);第三连接块(421)后部与拨动板(420)进行固接。10.根据权利要求9所述的一种基于大数据的障碍物预警巡检机器人,其特征在于:棘轮(413)上的齿内部设置有弹簧,用于在挤压时进行回缩。
技术总结
本发明涉及防倾倒路桩领域,尤其涉及一种基于大数据的障碍物预警巡检机器人。现有的道路巡检机器人,在遇到紧急的情况只能通过远程通讯装置通知工作人员,而无法及时的对紧急的情况处理。一种基于大数据的障碍物预警巡检机器人,包括有夹持系统、智能小车和防倾倒路桩;智能小车右部连接有夹持系统;夹持系统上放置有四个防倾倒路桩。本发明通过四个倾倒路桩对需要隔离的物体进行隔离,并通过设置支撑系统在放置防倾倒路桩时,防倾倒路桩上的支撑系统自动展开进行支撑,防止防倾倒路桩在大风天气中受风力的影响发生倾倒。中受风力的影响发生倾倒。中受风力的影响发生倾倒。
技术研发人员:杜逢春
受保护的技术使用者:杜逢春
技术研发日:2022.01.25
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。