1.本发明涉及自动化生产线中细长棒料成型码垛技术领域,具体涉及到一种摆臂码垛机。
背景技术:
2.在当今的高频焊管生产线技术领域中,细长棒料的成品物料通常被切断为等长度然后通过打包机将其打包成捆来方便运输和储存,而将细长棒料从生产线上整齐排列的运输到打包机上进打包工作则需要码垛机来完成。而现有技术的码垛机多为行架式的码垛机,即在上料架与打包机之间设置一套较高的轨道框架,在轨道框架上设置一套能够沿轨道框架延伸方向运行的轨道小车,在小车上又需要设置一套能够控制码垛机械手上下升降的升降装置。那么这样一来整套码垛设备即相对比较复杂,成本高且故障率高,所以为了解决这样的技术问题,本领域的技术人员通过简化码垛机的结构来设计一种结构简单且高效的摆臂码垛机成为了行业的趋势。
技术实现要素:
3.本实施方式提供了一种结构简单且高效的摆臂码垛机,通过改进码垛机的结构,去除了原有结构的行架结构、轨道小车以及升降设备,取而代之的是将码垛机械手设置在了一个基础梁上,并将基础梁设置在了一套摆臂装置上,通过摆臂装置的摆动实现基础梁带动码垛机械手在上料架与料框之间往复摆动实现码垛机械手对细长棒料的码放。
4.具体的,一方面,一种摆臂码垛机,用于对细长棒料w进行连续码垛成型,包括至少一个的码垛机械手c和基础梁j,所述码垛机械手c设置在基础梁j上,所述码垛机械手c能够抓取上料架s上的细长棒料w并将其码放在料框k中,其特征在于还设有摆臂装置b,所述基础梁j设置在摆臂装置b上,所述摆臂装置b能够带动基础梁j摆动并带动码垛机械手c在上料架s与料框k之间往复摆动实现码垛机械手c对细长棒料w的码放。
5.根据本发明第一种实施例的一个方面,所述摆臂装置b还设有动力器d和支架z和连杆机构m,所述连杆机构m架设在支架z上,所述动力器d设置在连杆机构m与支架z之间,所述动力器d能够推动连杆机构m实现摆动。
6.根据本发明第一种实施例的一个方面,所述连杆机构m包含第一连杆m1,第二连杆m2,第三连杆m3和第四连杆m4,所述第一连杆m1与支架z相互固定,所述基础梁j与第二连杆m2相互固定,所述动力器d与第三连杆m3相互铰接,所述动力器d通过推动第三连杆m3实现基础梁j的摆动。
7.根据本发明第一种实施例的一个方面,所述支架z和连杆机构m均设有两组,所述两组连杆机构m并列布置且之间还设有传动梁cc,所述传动梁cc串联两组连杆机构m,使两组连杆机构m能够同步摆动。
8.根据本发明第一种实施例的一个方面,所述码垛机械手c与基础梁j之间还设有升降装置sj,所述码垛机械手c设置在升降装置sj上且能够在升降装置sj的作用下相对于基
础梁j上下运动。
9.根据本发明第二种实施例的一个方面,所述支架z上还设有升降缸sjg,在升降缸sjg的作用下基础梁j能够带动码垛机械手c上下运动。
10.根据本发明实施例的一个方面,所述码垛机械手c上还设有滑动装置h和抓取框zq,所述抓取框zq设置在滑动装置h上,所述滑动装置h能够带动抓取框zq左右滑动实现对细长棒料w的抓取和释放。
附图说明
11.下面将参考附图来描述本发明示例性实施例的特征、优点和技术效果。
12.序号说明:细长棒料w、码垛机械手c、基础梁j、上料架s、料框k、摆臂装置b、动力器d、支架z、连杆机构m、第一连杆m1、第二连杆m2、第三连杆m3、第四连杆m4、传动梁cc、升降装置sj、滑动装置h、抓取框zq、升降缸sjg。
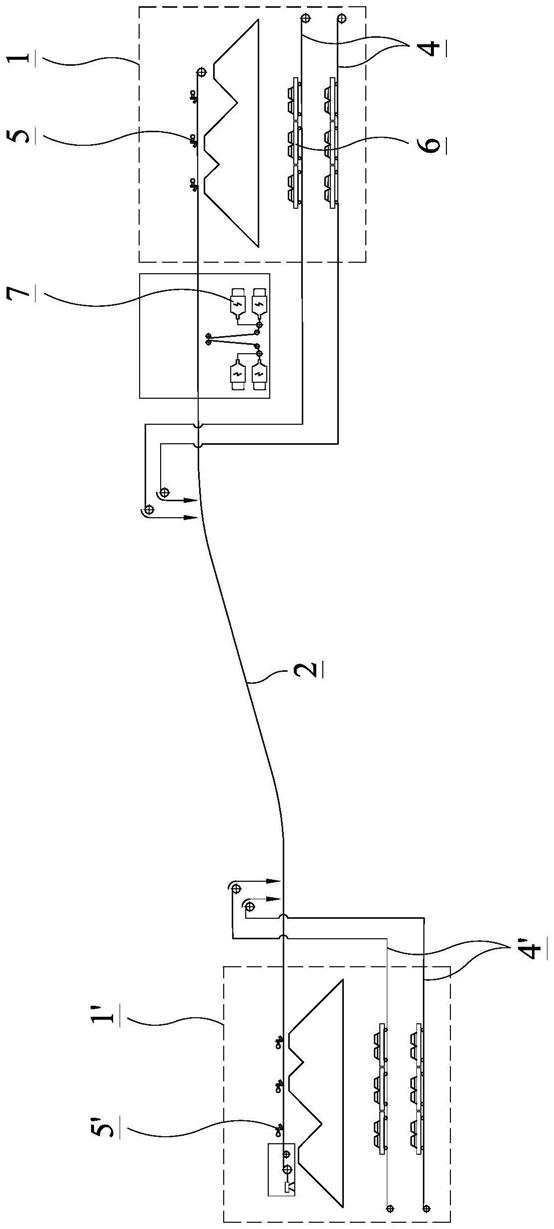
13.图1是本发明实施例整体布局基本结构示意图。
14.图2是本发明实施例连杆机构m开始摆动示意图。
15.图3是本发明实施例抓取框zq抓取细长棒料w示意图。
16.图4是本发明实施例细长棒料w被提出示意图。
17.图5是本发明实施例抓取框zq抓取完毕示意图。
18.图6是本发明实施例连杆机构m运送细长棒料w示意图。
19.图7是本发明实施例码垛机械手c码放堆垛示意图。
20.图8是本发明实施例抓取框zq撤出示意图。
21.图9是本发明实施例侧视示意图。
22.图10是本发明实施例另一种实施方式示意图。
23.在附图中,相同的部件使用相同的附图标记。附图并未按照实际的比例绘制。
具体实施方式
24.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例的详细描述和附图用于示例性地说明本发明的原理,但不能用来限制本发明的范围,即本发明不限于所描述的优选实施例,本发明的范围由权利要求书限定。
25.在本发明实施例的描述中,需要说明的是,除非另有说明,“垂直”、“平行”不只是数学意义上的绝对意义,可以理解为“大致垂直”、“大致平行”。
26.图1是本发明实施例整体布局基本结构示意图。
27.图2是本发明实施例连杆机构m开始摆动示意图。
28.图3是本发明实施例抓取框zq抓取细长棒料w示意图。
29.图4是本发明实施例细长棒料w被提出示意图。
30.图5是本发明实施例抓取框zq抓取完毕示意图。
31.如图1、图2、图3、图4和图5所示,本实施方式提供了一种结构简单且高效的摆臂码垛机,通过改进码垛机的结构,去除了原有结构的行架结构、轨道小车以及升降设备,取而代之的是将码垛机械手设置在了一个基础梁上,并将基础梁设置在了一套摆臂装置上,通过摆臂装置的摆动实现基础梁带动码垛机械手在上料架与料框之间往复摆动实现码垛机
械手对细长棒料的码放。在本实施例中其具体的实施方式包括至少一个的码垛机械手c和基础梁j,所述码垛机械手c是具有叉板的框型且能够上下、左右移动调整叉取位置的叉取机械手,所述基础梁j设为长横梁结构。所述码垛机械手c设置在基础梁j上,所述码垛机械手c上还设有滑动装置h和抓取框zq,所述滑动装置h在本实施方式中采用直线滑轨的结构方式实现两个板件之间能够相对滑动,通过滑动装置h实现了叉板的框型结构左右移动。所述抓取框zq即设为设置在滑动装置h下方的具有伸缩功能的叉板的框型,所述抓取框zq能够与滑动装置h组合成具有叉取细长棒料w功能的码垛机械手c。所述抓取框zq设置在滑动装置h上,所述滑动装置h能够带动抓取框zq左右滑动实现对细长棒料w的抓取和释放。所述基础梁j能够带动设置在其上的至少一个的码垛机械手c在上料架s与料框k之间往复运动来实现能够抓取上料架s上的细长棒料w并将其码放在料框k中。
32.根据本发明具体实施方式的一个方面,在本实施方式中所述设于上料架s与料框k之间的摆臂码垛机上还设有摆臂装置b,所述基础梁j设置在摆臂装置b上,所述摆臂装置b能够带动基础梁j摆动并带动码垛机械手c在上料架s与料框k之间往复摆动实现码垛机械手c对细长棒料w的码放。所述摆臂装置b还设有动力器d和支架z和连杆机构m,所述动力器d在本实施方式中设置为油缸或者气缸等可伸缩的执行元件。所述连杆机构m设置为平行四边形结构,所述连杆机构m包含第一连杆m1,第二连杆m2,第三连杆m3和第四连杆m4,所述第一连杆m1与第二连杆m2相互平行,所述第三连杆m3与第四连杆m4相互平行。所述支架z设为具有支撑悬挂功能的框架,在本实施方式中采用焊接钢梁悬臂式悬架。所述连杆机构m架设在支架z上,所述动力器d设置在连杆机构m与支架z之间且一端与连杆机构m铰接,一端与支架z铰接,所述动力器d能够推动连杆机构m实现摆动。所述第一连杆m1与支架z相互固定,所述基础梁j与第二连杆m2相互固定,所述动力器d与第三连杆m3相互铰接,所述动力器d通过推动第三连杆m3实现基础梁j的摆动。
33.图9是本发明实施例侧视示意图。
34.如图9所示,根据本发明具体实施方式的一个方面,所述支架z和连杆机构m均设有两组,所述两组连杆机构m并列布置且之间还设有传动梁cc,所述传动梁cc串联两组连杆机构m,使两组连杆机构m能够同步摆动。所述码垛机械手c与基础梁j之间还设有升降装置sj,所述码垛机械手c设置在升降装置sj上且能够在升降装置sj的作用下相对于基础梁j上下运动。所述基础梁j串联两边的第二连杆m2,通过两组连杆机构m的同步运动,实现基础梁j带动码垛机械手c的摆动。
35.如图1至图8所示,所述附图展示了本实施方式的工作过程,根据本发明实施例的一个方面,其具体工作过程为,首先细长棒料w被码放在上料架s上,然后动力器d推动连杆机构m向上料架s方向摆动,然后升降装置sj开始带动抓取框zq下降到能够抓取细长棒料w的位置,然后滑动装置h带动抓取框zq向左移动叉取细长棒料w,然后升降装置sj带动抓取框zq向上提起细长棒料w使细长棒料w离开上料架s,然后滑动装置h向右移动带动抓取框zq回到起始位置,然后动力器d缩回同步带动连杆机构m向右摆动并带动抓取框zq上的细长棒料w摆动到料框k的上方,然后升降装置sj下降同步带动抓取框zq上的细长棒料w逐渐落入料框k中,当抓取框zq的下表面接触到料框k中的最上层物料之后抓取框zq向右抽出,使抓取框zq中的细长棒料w落入料框k,至此码放动作完成。
36.图10是本发明实施例另一种实施方式示意图。
37.如图10所示,根据本发明第二种实施例的一个方面,其区别于上一种实施方式的具体区别技术特征在于所述支架z上还设有升降缸sjg,在升降缸sjg的作用下基础梁j能够带动码垛机械手c上下运动。根据本发明实施例的一个方面,其具体工作过程为,首先细长棒料w被码放在上料架s上,然后动力器d推动连杆机构m向上料架s方向摆动,然后升降缸sjg开始带动抓取框zq下降到能够抓取细长棒料w的位置,然后滑动装置h带动抓取框zq向左移动叉取细长棒料w,然后升降缸sjg带动抓取框zq向上提起细长棒料w使细长棒料w离开上料架s,然后滑动装置h向右移动带动抓取框zq回到起始位置,然后动力器d缩回同步带动连杆机构m向右摆动并带动抓取框zq上的细长棒料w摆动到料框k的上方,然后升降缸sjg下降同步带动抓取框zq上的细长棒料w逐渐落入料框k中,当抓取框zq的下表面接触到料框k中的最上层物料之后抓取框zq向右抽出,使抓取框zq中的细长棒料w落入料框k,至此码放动作完成。
38.应当理解,说明书对于本发明的具体实施方式的描述是示例性的,而不应当解释为对于本发明保护范围的不当限制。本发明的保护范围由其权利要求限定,并涵盖落入其范围内的所有实施方式及其明显的等同变例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。