1.本公开属于清洁设备领域,具体涉及一种清洁设备。
背景技术:
2.清洁机器人是一种智能清洁设备,其在家居,办公环境中起到极大的作用,让人们不在为清洁而烦恼。清洁机器人通常包括电池组件和充电极,在馈电时,可以通过基站对清洁机器人进行充电续航。
3.传统的基站通常包括充电端子,其与供电端相连接,可以用来给清洁机器人进行充电。现逐步出现实现对清洁机器人的清洁件进行清洗的基站,但对清洁件进行清理之后,会残留大量污水,污水不经处理容易发臭。
技术实现要素:
4.本公开的目的在于提供一种清洁设备,进而至少在一定程度上克服污水残留从而引起发臭的问题。
5.在本公开提供了一种清洁设备,用于清洁机器人,所述清洁设备包括:
6.至少一个待清洁件;
7.消杀装置,包括发生器、输送通道和调节件,所述输送通道与所述发生器连通,且所述输送通道具有多个输出工作位置,所述输出工作位置与所述待清洁件对应,所述调节件与所述输送通道连接,用于调节所述输送通道在至少一个所述输出工作位置下处于导通状态,以使所述发生器产生的清洁物体输出至对应的所述待清洁件处。
8.在本公开的一种示例性实施例中,所述清洁设备还包括:
9.基站,包括基座,所述基座设有清洁槽、第一污水腔、第一清水腔、第一垃圾腔中的至少一者。
10.在本公开的一种示例性实施例中,所述清洁机器人包括机器人本体和用于清洁待清洁面的清洁部,所述机器人本体能够停靠于所述基座,所述清洁部位于所述机器人本体靠近所述清洁槽的一侧,所述清洁机器人还包括驱使所述机器人本体移动的行走组件,所述行走组件设于所述机器人本体;所述机器人本体还设有第二污水腔、第二清水腔、第二垃圾腔中的至少一者;
11.其中,所述输送通道还能够输出至所述第二污水腔、所述第二清水腔、第二垃圾腔、所述机器人本体、所述行走组件和所述清洁部中的至少一个。
12.在本公开的一种示例性实施例中,多个所述待清洁件的至少一个为所述清洁槽、第一污水腔、第一清水腔或第一垃圾腔;且多个所述待清洁件的至少一个为所述第二污水腔、所述第二清水腔、第二垃圾腔、所述机器人本体、所述行走组件或所述清洁部。
13.在本公开的一种示例性实施例中,所述发生器设于所述清洁机器人,所述基座具有用于清洁机器人停靠的停靠位,所述清洁机器人停靠于所述停靠位时,所述发生器的输出口与所述输送通道的输入口对位连通。
14.在本公开的一种示例性实施例中,所述基站还包括背板和工作台,所述工作台和所述背板设于所述基座内,且所述背板位于所述基座的背部,并设于所述工作台的一侧,所述工作台设有所述清洁槽;
15.所述输送通道包括第一管路和第二管路,所述第一管路设有进口端,所述第二管路设有出口端;
16.所述进口端能在所述机器人本体停靠在所述工作台上时与所述发生器对接,且所述第一管路远离所述发生器的一端与所述第二管路相连通。
17.在本公开的一种示例性实施例中,所述第一管路贯穿所述背板并与所述发生器相连;
18.所述第二管路包括多个所述出口端,所述出口端与所述输出工作位置一一对应;
19.所述调节件位于所述第二管路上。
20.在本公开的一种示例性实施例中,所述调节件包括多个电磁阀,所述电磁阀一一对应设置在所述出口端上。
21.在本公开的一种示例性实施例中,
22.所述清洁设备还包括储存腔,所述储存腔包括进入端、释放端和储存腔本体,所述进入端和所述释放端分别位于所述储存腔本体的两侧,且所述进入端与所述发生器连通,以能够将所述发生器发出的清洁物排入至所述储存腔内;
23.所述释放端能够在所述发生器运行一段时间后打开,以使所述储存腔本体与所述输送通道连通,且所述储存腔本体能够在所述发生器运行一段时间内存储所述清洁物。
24.在本公开的一种示例性实施例中,所述储存腔本体的体积大于所述输送通道的流通面积。
25.在本公开的一种示例性实施例中,所述调节件设于所述基座内,并位于所述背板远离所述清洁槽的一侧;
26.所述调节件包括调节件本体、第一驱动件和挡板,所述第一驱动件和所述挡板设于所述可调节本体的内部,且所述调节件本体分别与所述第一管路和所述第二管路相连;
27.所述挡板与所述调节件本体的内壁贴合,所述挡板在所述第一驱动件的带动下,能够在所述调节件本体内进行滑动,以使得所述第一管路和不同的所述出口端导通。
28.在本公开的一种示例性实施例中,所述调节件具有角度调节结构或位置调节结构。
29.在本公开的一种示例性实施例中,所述输送通道和调节件设于所述清洁槽。
30.在本公开的一种示例性实施例中,所述输送通道设于所述工作台靠近所述背板的一侧;
31.所述调节件具有所述角度调节结构,所述第一管路的一端与所述发生器连通,另一端设于所述清洁槽内,且通过所述角度调节结构与所述第二管路转动连接;
32.所述第二管路包括一个所述出口端,所述出口端转动设于所述清洁槽内,以使所述出口端在多个不同的所述输出工作位置之间进行切换。
33.在本公开的一种示例性实施例中,所述调节件具有所述位置调节结构;
34.所述调节件设于所述基座内,并位于所述背板远离所述清洁槽的一侧;
35.所述第二管路具有一个所述出口端,且所述第二管路包括连接部和喷射部,所述
喷射部设有所述出口端,所述喷射部通过所述连接部与所述第一管路远离所述发生器的一侧连通,所述喷射部贯穿所述背板,部分所述喷射部设于所述清洁槽内;
36.所述位置调节结构包括第二驱动件和活动板,所述第二驱动件与所述活动板相连,且所述第二驱动件与所述基座可拆卸连接,所述活动板与所述喷射部固定相连,所述活动板和所述喷射部在所述第二驱动件的带动下,能够在所述背板上的滑动槽内进行滑动,以使所述出口端在多个不同的所述输出工作位置之间进行切换。
37.在本公开的一种示例性实施例中,所述输送通道设于所述工作台靠近所述背板的一侧;
38.所述第一管路的一端与所述发生器连通,另一端设于所述清洁槽内,且通过所述调节件与所述第二管路固定相连;
39.所述第二管路设于所述清洁槽内,并具有两个所述出口端,且其中一个所述出口端与所述清洁部相对应,另一个与所述清洁槽的底部相对应;
40.至少一个所述出口端上设有所述调节件。
41.在本公开的一种示例性实施例中,所述发生器为臭氧发生装置;和/或
42.所述发生器与所述进口端通过连接套连接。
43.本公开方案具有以下有益效果:
44.通过发生器产生清洁物体以对多个待清洁件进行杀菌除臭等清洁处理,减少了污水残留而引起的发臭问题。
45.此外,通过调节件可以调节输送通道在输出工作位置下的导通状态,以便于将发生器中产生的清洁物体输出至对应的待清洁件处,以针对不同的待清洁件进行针对性的杀菌除臭处理,在减少发臭问题的同时,也减少了清洁成本。
46.本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
47.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
48.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
49.图1示出了本公开实施例清洁机器人的结构示意图;
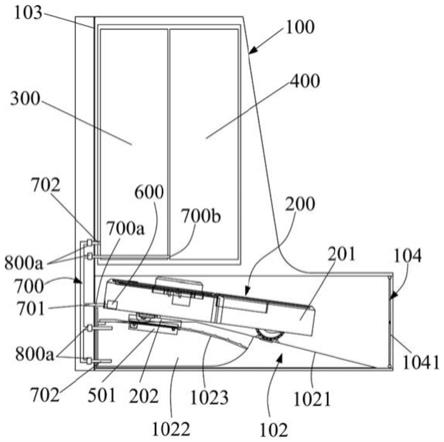
50.图2示出了本公开实施例清洁机器人停靠在基站内的结构示意图;
51.图3示出了本公开实施例清洁机器人进入基站内的结构示意图;
52.图4示出了本公开实施例基站的爆炸分解结构示意图;
53.图5是本公开实施例基站的消杀装置的安装示意图;
54.图6a至图6j是输送通道与调节件相配合的七种实施方式的结构示意图。
55.附图标记说明:
56.100、基站;101、基座;102、工作台;1021、第一引导件;1022、清洁槽;1023、第二引
导件;103、背板;104、遮挡组件;1041、门板;200、清洁机器人;201、机器人本体;202、清洁部;203、驱动轮组;204、中部行走轮;300、第一污水腔;400、第一清水腔;500、清洁机构;501、清洁件;600、臭氧发生装置;700、输送通道;700a、进口端;700b、出口端;701、第一管路;702、第二管路;7021、连接部;7022、喷射部;800、调节件;800a、电磁阀;801、调节件本体;801a、连通腔;801b、密封腔;802、第一驱动件;803、挡板;804、第二驱动件;805、活动板;900、储存腔。
具体实施方式
57.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本公开将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。
58.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本公开的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而没有特定细节中的一个或更多,或者可以采用其它的方法、组元、装置、步骤等。在其它情况下,不详细示出或描述公知方法、装置、实现或者操作以避免模糊本公开的各方面。
59.下面结合附图和具体实施例对本公开作进一步详述。在此需要说明的是,下面所描述的本公开各个实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。下面通过参考附图描述的实施例是示例性的,旨在用于解释本公开,而不能理解为对本公开的限制。
60.待清洁面,可以是地毯、地板等需要被清洁的待清洁面。
61.本公开实施例提供了一种清洁设备,可用于清洁清洁机器人,清洁设备包括基站100、至少一个待清洁件和消杀装置;其中,基站100可以用于清洁机器人200充电和/或清洁清洁机器人200的清洁部;待清洁件设于基站100的内部,并通过消杀装置产生清洁物体对待清洁件进行消毒除臭处理。
62.具体地,清洁机器人200包括机器人本体201和用于清洁待清洁面的清洁部202,其中,机器人本体201进入基站100之后,基站100对机器人本体201进行充电和/或对清洁部202进行清理。清洁机器人200按用途分类可以是商用清洁机器人200和家用清洁机器人200,按种类分可以是扫地机、扫拖一体机、拖地机、擦地机和洗地机等自动清洁机器人200。清洁机器人200可以呈椭圆形、圆形、d字形等形状,并可选设置有清洁部202和用于给清洁部202供水的水箱,以及用于行走的行走组件,行走组件包括中部行走轮204、左行走轮和右行走轮,如图1所示。
63.清洁部202,清洁部202可以平板状的清洁部202,比如平板拖布,如图1所示;也可以是滚轴状的清洁部202,比如海绵滚刷或其它包裹有布条等拖擦材料的滚轴。清洁部202可以设置在机器人本体201的底部的前半部或后半部,在清洁部202设置在前半部时,机器人本体201直接行驶进基站100内,在清洁部202设置在后半部时,机器人本体201后退进入基站100内。
64.驱动轮组203,包括左行走轮和右行走轮,具体地,左行走轮,可以设置有驱动电机,并在驱动电机和左行走轮之间设置传动组件,左行走轮可以转动设置在清洁机器人200
的主体底部;右行走轮,可以设置在清洁机器人200的主体底部,并与左行走轮对称设置,即设置有驱动电机,并在驱动电机和右行走轮之间设置传动组件,右行走轮可以转动设置在机器人本体201上,如图1所示。
65.中部行走轮204,中部行走轮204设置在机器人本体201的底部与机器人本体201位于两侧的左行走轮和右行走轮进行配合,形成三点支撑,以支撑清洁机器人200在待清洁面上运行,如图1所示。
66.前撞组件,前撞组件为设置在机器人本体201上用来感知前部碰撞的组件,前部即机器人本体201靠近清洁机器人200行进方向的一侧。前撞组件包括半圆环状的框体,以及设置在机器人本体201前部左右两侧的开关,该框体水平活动连接在机器人本体201的前部,清洁机器人200受到来自前部的撞击时,对应按压撞击一侧的开关,使得清洁机器人200对应做出避让等动作。
67.清洁机器人200还可以根据需要选择设置控制组件、距离感知组件、悬崖传感器等各种部件。
68.此外,清洁机器人200在机器人本体201的内部设有第二污水腔、第二清水腔、第二垃圾腔中的至少一者。其中,第二污水腔用于收集待清洁面上的污水,防止待清洁面上的污水残留;第二清水腔用于对待清洁面进行清洁,对待清洁面进行清洁之后,第二污水腔可以收集进行清洁之后的污水;第二垃圾腔用于收集待清洁面上的杂质等。可选的,机器人本体201的内部设有第二污水腔、第二清水腔和第二垃圾腔。
69.基站100对于清洁机器人200的清洁方式可以是水洗或干洗,具体的,可以是机械摩擦式的水洗,也可以是超声波水洗。
70.进一步地,基站100包括:
71.基座101,基座101可以具有供清洁机器人200进出的入口,如图2或图3所示,该入口可以是半敞开式的入口,其可以形成开口,开口式的入口便于将入口密封或遮挡,该开口也可以是凹槽形式的开口,还可以是在凹槽的基础上将顶部贯通的开口,或者可以是其它形状的开口。当然,入口也可以是全敞开式的入口;所述基座101还包括:
72.清洁槽1022,当清洁机器人200停靠在基座101内时,清洁部202与清洁槽1022相对,用于对清洁机器人200的清洁部202进行清洁;或
73.第一污水腔,用于收取对清洁部202清洁之后的污水;或
74.第一清水腔,用于对清洁部202提供清洁水;或
75.第一垃圾腔,用于收集对清洁部202清洁之后的杂质。
76.可选的,基座101设有清洁槽1022、第一污水腔、第二清水腔和第一垃圾腔。
77.其中,基站100还包括:
78.工作台102,工作台102供清洁机器人200停靠,且所述工作台102具有用于清洁机器人200停靠的停靠位,工作台102延伸至待清洁面;该工作台102可以用于清洁清洁机器人200的清洁部202或者对清洁机器人200进行充电,或者对清洁部202进行消毒除臭处理,或者对清洁机器人200进行维护或更换部件等操作。该工作台102可以与基座101可拆卸连接;和
79.背板103,背板103位于基座101的背部,沿清洁机器人200的前进方向上,工作台102和背板103依次设置,且不与清洁机器人200相接触。
80.工作时,清洁机器人200可以停靠在工作台102上的停靠位进行上述工作。如图3或图4所示,在工作台102延伸至待清洁面时,清洁机器人200可以直接爬上工作台102,对工作台102采用抬升机构时,可以设置上下活动的停靠板,可以在清洁机器人200停靠在入口处的停靠板上时,抬升停靠板将清洁机器人200抬升至工作面的高度进行工作。
81.进一步地,参见图4所示,工作台102还包括第一引导件1021、清洁槽1022和第二引导件1023,第一引导件1021从清洁槽1022延伸至待清洁面,第二引导件1023设置在清洁槽1022上,并未与清洁槽1022的中部,以引导清洁机器人200的中部行走轮204进入清洁槽1022内。
82.在本实施例中,该工作台102可以同时用于给清洁部202进行清洁和对清洁机器人200进行充电。
83.具体地,基站100还具有充电极片,充电极片可以设置在清洁槽1022的上部,一定程度防止清洁液和污水污染充电极片或导致基站100短路。当基站100处于工作状态时,清洁机器人200的清洁部202进入清洁槽1022,基站100对清洁机器人200的清洁部202进行清洁,并且基站100的充电极片与清洁机器人200上的充电端抵接。
84.至少一个待清洁件可以为清洁槽1022、第一污水腔300、第一清水腔400、第一垃圾腔中的至少一者,以对其进行消毒除菌处理。
85.可选地,该清洁设备包括三个待清洁件时,消杀装置分别与通过输送通道700三个待清洁件连通,以对其进行消毒杀菌处理。
86.具体地,该清洁设备包括清洁槽1022、第一污水腔300和第一清水腔400三个待清洁件,以消除污水残留以及清水残留时间过久引起的发臭问题。
87.此外,清洁设备还包括清洁机构500,第一清水腔400与清洁机构500相连通,以向清洁机构500输送清洁水,并通过清洁水对清洁机器人200的清洁部202进行清洁,对清洁部202进行清洁之后的污水流入至清洁槽1022内,以用于收集清洁机构500对清洁部202清洗的污水。
88.更具体地,清洁机构500包括可活动的清洁件501,如图4所示,例如可以是通过电力驱动清洁件501转动以对清洁部202进行清洁,驱动清洁件501转动与平板状的清洁部202发生相对运动,或与滚轴状的清洁部202发生相对运动,实现机械摩擦去污。
89.进一步地,考虑到对清洁部202进行清洁之后,会在清洁槽1022内积累大量污水,需要对污水进行排空;因此,在基座101的内部还设有可拆卸的第一污水腔300,以用于抽取清洁槽1022中的污水并存储在第一污水腔300内。
90.采用可拆卸的方式,以便于能及时更换第一污水腔300以及对基座101内部进行清洁;此外,对清洁槽1022中的污水进行抽取时,可以通过水泵进行抽取,进水管连通清洁槽1022和水泵,出水管连通水泵和第一污水腔300,以实现对清洁槽1022内的污水进行抽取。
91.需要说明的是,第一清水腔400和第一污水腔300可以采用并列设置在基座101的上半部,设有清洁槽1022的工作台102可以设置在基座101的底部,且第一清水腔400、第一污水腔300和工作台102之间不相互连通,采用分布式的排列方式以更好的提升基座101内部的利用空间,节省基座101内部的使用空间,且也更好地便于对基座101内部进行清洁。
92.进一步地,考虑到清洁槽1022内的污水不能完全抽取,容易在清洁槽1022内残留,残留时间过长容易发臭;以及第一污水腔300、第一清水腔400内的水源存放过久也会发臭,
以及为了对清洁机器人200的清洁部202进行消毒杀菌处理;清洁槽1022、第一污水腔300、第一清水腔400和清洁部202均与消杀装置连通。
93.更进一步地,该消杀装置包括发出清洁物体的发生器、输送通道700和调节件800。
94.进一步地,如图5所示,发生器可以采用基站100内部自带的发生器,例如,在本实施方式中,发生器为臭氧发生装置600,且臭氧发生装置600固定在清洁槽1022上,具体的,输送通道700,臭氧发生装置600,调节件800均设置在清洁槽1022上,便于消杀装置的维护和更换,此时,工作台102上设置有隔板,隔板将工作台102上清洁机器人200下方的容纳腔分隔为隔板下方的污水槽以及隔板上方的清洁槽1022,隔板可以带有过滤孔并相对水平面倾斜设置,便于清洁清洁部202产生的污水顺着隔板进行过滤,此时调节件800为可调节角度的喷气头,可以调节至喷向污水槽或清洁槽1022或清洁机器人200的清洁部202;又如,在一变形实施方式中,与上一实施方式不同的是,臭氧发生装置600可拆卸的固定在基座101内壁,以便于臭氧发生装置600的更换和维修臭氧发生装置600与第一清水腔400、第一污水腔300和清洁槽1022之间不直接连通;此外,在其他变形实施方式中,该臭氧发生装置600可安装于背板103靠近清洁槽1022的一侧,也可安装于背板103远离清洁槽1022的一侧。
95.具体地,该臭氧发生装置600安装于背板103靠近清洁槽1022的一侧,以便与输送通道700的连通,且便于更换和维修。
96.此外,在另一些实施例中,发生器也可以采用机器人本体201内部自带的臭氧发生装置600,可以减少在基站100内设置额外的清洁装置所占的空间;此外,臭氧发生装置600也可以与基站100进行联动,节省部件;并且,清洁机器人200也可以在外部运行过程中进行臭氧消毒。
97.需要说明的是,发生器也可以采用其它具有消毒除臭功能的装置,例如,氯气发生装置或二氧化氯发生装置。
98.更进一步地,为了便于将基站100内的臭氧发生装置600产生的臭氧清洁物体传输至待清洁件处,该消杀装置还包括有输送通道700,该输送通道700与发生器连通,以输送臭氧发生装置600产生的臭氧;此外,该输送通道700具有多个输出工作位置,其输出工作位置与待清洁件相对应。
99.需要说明的是,当清洁设备采用三个待清洁件时,该输送通道700除了能输出至清洁槽1022、第一污水腔300和第一清水腔400,还能够输出至第二污水腔、第二清水腔、第二垃圾腔、机器人本体201、行走组件和清洁部202中的至少一者;以同时对基站100和停靠在工作台102上的清洁机器人200进行清洁,提高工作效率。
100.具体地,当采用三个待清洁件时,输送通道700分别与清洁槽1022、第一污水腔300和第一清水腔400三个待清洁件连通,且输送通道700还与清洁部202相对应,也即输送通道700对应有四个输出工作位置,分别为清洁槽1022、第一污水腔300、第一清水腔400和清洁部202,待清洁件与输出工作位置的位置相对应。
101.进一步地,该输送通道700固定设置在基座101的内部;输送通道700包括第一管路701和第二管路702;其中,第一管路701与第二管路702之间相互连通,第一管路701上设有进口端700a,第二管路702上设有出口端700b;其中,进口端700a一端与臭氧发生装置600的出口相连通,以用于接收臭氧发生装置600所产生的清洁物体,另一端与第二管路702相连通,以便于将清洁物体导通至对应待清洁件内,实现杀菌除臭作用。
102.具体地,进口端700a与臭氧发生装置600通过一连接套实现插接相连,以使臭氧发生装置600产生的臭氧经过进口端700a进入管路,再通过出口端700b排入第一污水腔300、第一清水腔400和清洁槽1022内,以及对清洁部202进行喷射消毒除臭处理,该连接套两端的直径应分别大于进口端700a的直径和臭氧发生装置600出口的直径;采用连接套以便于臭氧发生装置600和输送通道700的进口端700a更好地进行对接,且能更好地进行密封。
103.此外,臭氧发生装置600的出口也可与进口端700a直接插接相连;应当理解的是,臭氧发生装置600的出口与进口端700a可采用过盈配合,对臭氧发生装置600和进口端700a更好地进行密封,以避免臭氧的泄露。
104.此外,消杀装置还包括有调节件800,该调节件800与输送通道700连接,以用于调节输送通道700与四个输出工作位置之间的导通状态,以使发生器产生的清洁物体输出至对应的待清洁处,以使消杀装置可以针对性进行清洁,减少臭氧的浪费,降低成本。
105.需要说明的是,一个待清洁件可以对应多个输出工作位置;也可以一个待清洁件对应一个输出工作位置。
106.一种可选的实施例,当发生器采用清洁机器人200自带的臭氧发生装置600时,进口端700a的一端能够在机器人本体201停靠在工作台102上的停靠位时与臭氧发生装置600的出口对接连通,以用于接收臭氧发生装置600所产生的清洁物体,另一端与第二管路702相连通,以便于将清洁物体导通至对应待清洁件内,实现杀菌除臭作用。
107.更具体地,进口端700a与臭氧发生装置600通过一连接套实现插接相连,以使臭氧发生装置600产生的臭氧经过进口端700a进入管路,再通过出口端700b排入第一污水腔300、第一清水腔400和清洁槽1022内,以及对清洁部202进行喷射消毒除臭处理,该连接套两端的直径应分别大于进口端700a的直径和臭氧发生装置600出口的直径。
108.需要说明的是,当需要将臭氧发生装置600和进口端700a连通时,驱动清洁机器人200进入基站100并停靠在工作台102上的停靠位,臭氧发生装置600的出口通过连接套与进口端700a连通。连接套的一端可固定在进口端700a处,也可固定在臭氧发生装置600的出口处,而连接套的另一端与臭氧发生装置600的出口套接或与进口端700a套接。连接套与进口端700a或臭氧发生装置600紧密贴合,避免臭氧外漏;采用连接套以便于臭氧发生装置600和输送通道700的进口端700a更好地进行对接,且能更好地进行密封。
109.应当理解的是,连接套可以采用软胶套,避免与输送通道700的进口端700a或臭氧发生装置600的出口发生刮擦,提高输送通道700的进口端700a或臭氧发生装置600的出口的使用寿命。
110.此外,臭氧发生装置600的出口也可与进口端700a直接插接相连;应当理解的是,臭氧发生装置600的出口与进口端700a可采用过盈配合,对臭氧发生装置600和进口端700a更好地进行密封,以避免臭氧的泄露;此外,臭氧发生装置600的出口和进口端700a中的任一一者可以采用软管,以更好地进行对接,避免彼此之间发生刮擦。
111.针对不同的实施方式中,当发生器采用基站100内自带的臭氧发生装置600,且具有三个待清洁件时,输送通道700可以采用不同的结构设置,具体可以包括如下实施方式:
112.一种实施方式,待清洁件包括清洁槽1022、第一污水腔300和第一清水腔400,且输送通道700还与清洁部202相对应;其中,输送通道700的第二管路702的出口端700b分别与清洁槽1022、第一污水腔300、第一清水腔400和清洁部202相对应,对其进行消毒杀菌处理,
以避免污水残留以及清水储存过久产生臭味的问题。
113.具体地,第一管路701贯穿背板103并与臭氧发生装置600连通;第二管路702包括有四个出口端700b,分别为第一出口端、第二出口端、第三出口端和第四出口端;各出口端700b分别与第一污水腔300、第一清水腔400、清洁部202和清洁槽1022连通,即输送通道700具有四个不同的输出工作位置,参见图6a中输送通道700相关结构所示;以对其进行消毒除臭处理,避免第一污水腔300中的污水存放过久发出臭味、第一清水腔400中的清水进行消毒除臭、清洁部202进行消毒除臭和对清洁槽1022中残留的污水进行消毒除臭处理,以避免污水残留过久发出臭味的问题。
114.具体地,第一管路701上套设有连接套并穿过背板103与臭氧发生装置600的出口连通,第一管路701垂直于第二管路702连通,部分第二管路702设于背板103远离臭氧发生装置600的一端,第二管路702从与第一管路701相连处进行分流,沿垂直第一管路701向上的方向上,设有第一分流;沿垂直第一管路701向下的方向上,设有第二分流,参见图6a中输送通道700相关结构所示。
115.其中,参见图6a中输送通道700相关结构所示,第一分流分为第一支路和第二支路,均与第一分流相互垂直,第一支路与第二支路相互平行,且第一支路位于第二支路的上方,第一支路穿过背板103与第一污水腔300相连通,第二支路穿过背板103与第一清水腔400连通,以对第一污水腔300和第一清水腔400进行消毒除臭清洁处理。
116.进一步地,参见图6a中输送通道700相关结构所示,第二分流分为第三支路和第四支路,均与第二分流相互垂直,并与第一支路和第二支路相互平行,第三支路位于第四支路的上方,第三支路穿过背板103与清洁机器人200上的清洁部202相对应,第四支路穿过背板103并位于清洁槽1022的底部,以分别对清洁部202和清洁槽1022进行消毒除臭处理,消除污水长时间残留发出臭味的问题。
117.应当理解的是,第一支路、第二支路、第三支路和第四支路均设有出口端700b,分别对应第一出口端、第二出口端、第三出口端和第四出口端,以便于对第一污水腔300、第一清水腔400、清洁部202和清洁槽1022进行消毒除臭处理。
118.此外,第一支路、第二支路、第三支路和第四支路中的至少一者采用调节件800结构,调节件800可以调节不同支路与第一管路701之间的开闭,例如,电磁阀800a。
119.更加具体地,第一支路、第二支路、第三支路和第四支路均设有电磁阀800a,参见图6a中调节件800的相关结构所示;可针对不同的需求切换第一管路701与不同支路之间的导通关系,以针对不同的腔体进行针对性的消毒除臭处理,既能节省臭氧的使用成本,又能提高产品的利用率。
120.需要说明的是,电磁阀800a可以设在背板103远离臭氧发生装置600的一侧,以避免水渍等对电磁阀800a侵蚀,以保证电磁阀800a的使用寿命,且也提高空间利用率;当然,电磁阀800a也可以设在靠近臭氧发生装置600的一侧。
121.此外,对于电磁阀800a的控制,可以通过基站100内部的控制模块来对电磁阀800a进行智能化自动控制,以提高整体的自动化程度,针对不同的腔体,进行针对性的清洁处理,降低整体的使用成本,也可以通过清洁机器人200来对电磁阀800a进行智能化自动控制。
122.除了上述实施例中提到的输送通道700结构,输送通道700还可以包括如下实施方
式:
123.一种实施方式,其与上述实施方式不同之处在于,参见图6b中输送通道700相关结构所示,第一分流通过第一分流腔与第一支路和第二支路连通,第二分流通过第二分流腔与第三支路和第四支路连通,并将电磁阀800a设在第一分流和第二分流上,通过电磁阀800a来切换第一管路701与不同分流管路之间的连通关系,从而切换不同支路与第一管路701之间的连通关系。
124.举例说明,参见图6b中输送通道700相关结构所示,当开通第一分流上的电磁阀800a时,第一管路701与第一分流连通的第一支路和第二支路相连通,而第二分流上的电磁阀800a关闭,即第一管路701不与第二分流上的第三支路和第四支路相连通,此时,输送通道700具有两个输出工作位置,也即第一管路701和第二管路702与第一污水腔300和第一清水腔400导通,对第一污水腔300和第一清水腔400进行消毒除臭处理;相反地,当第二电磁阀800a开启时,第一管路701与第二分流上的第三支路和第四支路连通,第一管路701与第一分流上的第一支路和第二支路不连通。此时,输送通道700具有两个输出工作位置,也即第一管路701和第二管路702与清洁部202和清洁槽1022对应,并对其进行消毒除臭处理;通过此种方式,可实现不同分支管路之间的高效切换,节省了电磁阀800a的投入,相应的减少了成本。
125.此外,可以通过基站100内部的控制模块来对电磁阀800a进行智能化自动控制,以提高整体的自动化程度,针对不同的腔体,进行针对性的清洁处理,降低整体的使用成本。
126.当输送通道700与一个待清洁件和一个清洁部202相对应时,具体包括如下实施方式:
127.一种实施方式,输送通道700设于背板103朝向臭氧发生装置600的一侧,以更加方便维护输送通道700;第二管路702包括两个分支管路,且两个分支管路均设于清洁槽1022内,且分别与清洁机器人200的清洁部202和清洁槽1022的底壁相对,也即输送通道700具有两个输出工作位置;第一管路701的一段通过连接套与臭氧发生装置600连通,第一管路701的另一端垂直清洁槽1022向下延伸,并与第二管路702连通,参见图6c中输送通道700的相关结构所示。
128.此外,在两个分支管路上均设有调节件800,参见图6c中调节件800的相关结构所示。其中,调节件800可采用电磁阀800a,以用于切换不同分支管路与第一管路701连通关系,以实现对不同位置处的消毒除臭处理;采用此种方式,切换更加简单,且更加方便维护输送通道700。
129.需要说明的是,该两个分支管路上也可任选其一设有调节件800。
130.此外,可以通过基站100内部的控制模块来对电磁阀800a进行智能化自动控制,以提高整体的自动化程度,针对不同的腔体,进行针对性的清洁处理,降低整体的使用成本。
131.需要说明的是,该连接套也可以采用上述软胶套,以提高第一管路701与臭氧发生装置600之间的连接关系,在此不再赘述。
132.针对不同的实施方式,当输送通道700对应三个待清洁件和一个清洁部202时,其调节件800的使用结构也可以不同,具体包括如下实施方式:
133.一种可选的实施方式,参见图6d中调节件800的相关结构所示,该调节件800包括调节件本体801、第一驱动件802和挡板803,其中,调节件本体801为密封的长方形的腔体,
其靠近臭氧发生装置600的一面与第一管路701相连,与其紧挨着的上下两面分别与第一分支管路、第二分支管路和第三分支管路、第四分支管路相连。
134.具体地,该第一管路701贯穿背板103并通过连接套与臭氧发生装置600插接相连,另一端通过调节件800与第二管路702相连通;第二管路702包括第一分支管路、第二分支管路、第三分支管路和第四分支管路,参见图6d中输送通道700相关结构所示。
135.需要说明的是,该连接套也可以采用上述软胶套,以提高第一管路701与臭氧发生装置600之间的连接关系,在此不再赘述。
136.其中,第一分支管路和第二分支管路设于调节件800的一侧,且分别与第一污水腔300和第一清水腔400相连;第三分支管路和第四分支管路设于第一分支管路的相对一侧,且与清洁部202和清洁槽1022相对应,以划分不同的消毒路径,也即该输送通道700对应四个输出工作位置,参见图6d所示。
137.更具体地,第一驱动件802和挡板803均设在调节件本体801的内部,第一驱动件802可通过螺栓、焊接或铆接等固定方式固定在调节件本体801的内壁上,并且挡板803与第一驱动件802的输出端卡接或套接,并能跟随第一驱动件802的运动而运动;举例说明,第一驱动件802可以采用推拉式的电机或气缸。
138.进一步地,参见图6d中调节件800的相关结构所示,挡板803与调节件本体801的内壁相贴合,且可在内壁上进行相对滑动,将调节件本体801分成连通腔801a和密封腔801b。应当理解的是,连通腔801a应是第一管路701通过调节本体与第二管路702进行连通的腔体,而密封腔801b则是第一管路701未与第二管路702连通的腔体;通过第一驱动件802驱动挡板803在调节件本体801内进行上下移动,以改变与第一管路701与不同的出口端700b导通。
139.举例说明,第二管路702包括上述提到的第一支路、第二支路、第三支路和第四支路;当第一驱动件802驱动挡板803位于第一管路701上方时,挡板803远离第一管路701的一侧与调节件本体801的内壁形成密封腔801b,即第一管路701与第一支路和第二支路不连通,也即对第一污水腔300和第一清水腔400不进行消毒除臭清理,而挡板803靠近第一管路701的一侧与调节件本体801的内壁形成连通腔801a,即第一管路701与第三支路和第四支路连通,也即对清洁槽1022和清洁部202进行消毒除臭清理,参见图6d中输送通道700的相关结构所示;此时,该输送通道700对应有两个输出工作位置。
140.与之对应的,当第一驱动件802驱动挡板803位于第一管路701下方时,挡板803远离第一管路701的一侧与调节件本体801的内壁形成密封腔801b,而靠近第一管路701的一侧与调节件800的内壁形成连通腔801a,其与上述清理方向相反,在此不再进行赘述。
141.采用此种调节件结构,其调节更加准确,对待清洁件消毒除臭功能更好;且同时控制两个不同的支路,控制更加简单,操作也更加方便。
142.需要说明的是,该调节件本体801应采用摩擦力小且不易与臭氧发生反应的材料制成,例如:聚四氟乙烯;且挡板803与调节件本体801可采用相同的材料制成,以减小挡板803与调节件800内壁之间的摩擦,以便于挡板803在调节件800内壁上更好地进行滑动。
143.此外,第一驱动件802的动力源可以采用电池、蓄电池等,以便于对其进行拆卸和更换,且可减少调节件800本体的开孔,避免臭氧泄露,提高杀菌和除臭功能。
144.除此之外,当采用一个出口端700b时,一个待清洁件也可以对应多个输出工作位
置;通过改变第二管路702上出口端700b在待清洁件内的位置,也即出口端700b在多个不同的输出工作位置之间进行切换,也即调节件800还可采用如下不同的实施方式,具体包括如下实施方式:
145.一种实施方式,参见图6e所示,输送通道700设于背板103靠近臭氧发生装置600的一侧,该输送通道700包括一根第一管路701和一根第二管路702;第一管路701的进口端700a通过连接套与臭氧发生装置600的出口相连通,且第一管路701垂直向下朝清洁槽1022进行延伸,并通过调节件800与第二管路702连通,调节件800可以调整第二管路702在清洁槽1022中的相对位置。
146.需要说明的是,该连接套也可以采用上述软胶套,以提高第一管路701与臭氧发生装置600之间的连接关系,在此不再赘述。
147.具体地,参见图6e所示,该调节件800可以采用角度调节结构。其中,角度调节结构包括电机和支架,电机的输出端传动连接支架,支架连接第二管路702,通过电机的输出轴的转动角度控制第二管路702的朝向,即改变第二管路702中出口端700b在清洁槽1022内的位置,即出口端700b在清洁槽1022内具有多个输出工作位置,并通过电机驱动第二管路702进行转动,以实现出口端700b在多个不同的输出工作位置之间进行切换,以对清洁槽1022各处进行消毒除臭处理,以及对处于清洁槽1022内的清洁部202进行消毒除臭处理。
148.举例说明,第二管路702相对于第一管路701的转动角度为0-90
°
,也即可以通过不同的角度,来切换出口端700b所对应的不同输出工作位置;当第二管路702与第一管路701的角度为0
°
时,如图6f所示,第二管路702的出口端700b朝向清洁槽1022的底壁,即清洁槽1022的底壁作为一个输出工作位置;此时,对清洁槽1022的消毒处理效果最好,并对清洁槽1022底部和清洁部202进行消毒处理;当第二管路702相对于第一管路701的转动角度为90
°
时,如图6e所示,第二管路702的出口端700b与清洁部202相对应,对清洁部202和清洁槽1022进行消毒除臭处理,此时,即清洁部202作为另一个输出工作位置,对清洁部202的消毒除臭效果最好,并且更加方便切换第二管路702的朝向。
149.应当理解的是,通过电机转动带动第二管路702朝向不同的位置,以使第二管路702在不同输出工作位置之间进行切换;通过旋转即可使出口端700b在多个不同的输出工作位置之间进行切换,切换方式更加简单,操作也更加方便;此外,将输送通道700设在工作台102靠近背板103的一侧,并且,更加方便地维护输送通道700。
150.此外,电机的动力源可以采用自带的电池或可采用基站100的电源。
151.另一种实施方式,参见图6g所示,输送通道700包括一个第一管路701和一个第二管路702;此外,与第二管路702相连的调节件800固定设于基座101的内壁上,且位于背板103远离臭氧发生装置600的一侧;此时,调节件800为位置调节结构。
152.具体地,参见图6g所示,位置调节结构包括第二驱动件804和活动板805。其中,第二驱动件804通过螺纹连接或铆钉连接等可拆卸的方式固定在基座101的内壁上,并位于背板103远离臭氧发生装置600的一侧;活动板805与第二驱动件804固定相连,可跟随第二驱动件804的运动而运动,例如,第二驱动件804推动活动板805向上运动,或第二驱动件804拉动活动板805向下运动。
153.进一步地,参见图6g所示,第二管路702包括连接部7021和喷射部7022。其中,连接部7021位于背板103远离臭氧发生装置600的一侧,喷射部7022贯穿背板103并与清洁槽
1022连通,且喷射部7022的一端设有出口端700b,另一端通过连接部7021与第一管路701相连,并且,喷射部7022还与活动板805固定连接,其可通过卡扣卡接在活动板805上。
154.与之对应的,在背板103上设有与喷射部7022相对应的滑动槽,以使喷射部7022在活动板805的带动下,在滑动槽内进行滑动,以改变其喷射部7022在清洁槽1022内的相对位置,也即改变了出口端700b的朝向。
155.举例说明,当采用上下滑动的喷射部7022时,该活动板805在第二驱动件804的带动下从而进行上下移动,并带动喷射部7022在滑动槽内进行滑动;当喷射部7022位于滑动槽最顶部时,该喷射部7022的出口端700b与清洁部202相对应,如图6g所示;此时,出口端700b对应一个输出工作位置,即对清洁部202和的清洁槽1022进行消毒除臭处理,并且对清洁部202的消毒除臭效果最好;当喷射部7022位于滑动槽最底处时,该喷射部7022的出口端700b与清洁槽1022的底部相对应,如图6h所示,出口端700b对应另外一个输出工作位置,并对清洁槽1022和清洁部202进行清洁,对清洁槽1022的底壁消毒除臭效果最好。
156.应当理解的是,该滑动槽的高度可与第二驱动件804的最大推拉范围相同,也可大于第二驱动件804的最大推拉范围,以保证喷射部7022的滑动范围;此外,可以理解的是,当出口端700b在进行上下滑动时,可以对应多个不同的输出工作位置,也即通过第二驱动件804的升降来达到出口端700b与多个不同的输出工作位置之间进行切换。
157.需要说明的是,通过第二驱动件804推动第二管路702上下滑动,即可实现出口端700b在多个不同的输出工作位置之间进行切换,切换方式更加简单,操作也更加方便。
158.此外,参见图6g或图6h所示,该连接部7021可以采用软管,且软管的长度应大于活动板805的移动距离,以保证喷射部7022与第一管路701之间的连通性,且采用软管能改变喷射部7022的相对位置,以改变出口端700b的位置,以对清洁槽1022内的不同位置进行消毒除臭处理,且清洁处理成本更低;此外,连接部7021也可以采用伸缩性能好的橡胶管,应当理解的是,橡胶管可以跟随活动板805的移动而上下伸缩。
159.此外,第二驱动件804可以采用推拉式的电机或气缸,且第二驱动件804的动力源可以采用电池或基站100的动力源。
160.除此上述所描述的实施方式之外,还可以在臭氧发生装置600与进口端700a之间增设用于暂存臭氧的储存腔900。
161.具体地,参见图6i或图6j所示,储存腔900设于基座101内,并位于臭氧发生装置600和第一管路701之间;其基站100内部的臭氧发生装置600与储存腔900连通,而储存腔900的另一端和第一管路701连通。
162.需要说明的是,该输送通道700可以采用以上实施方式中的任意一种输送通道700;此外,调节件800也可以采用上述实施方式中的任意一种。
163.更具体地,参见图6i和6j所示,储存腔900包括进入端、释放端和储存腔本体;其中,储存腔本体与臭氧发生装置600相对的一侧的中部开设有进入端,其与臭氧发生装置600的出口连通,储存腔本体远离清洁机器人200的一侧采用平整面,且与进入端相对的一侧设有释放端,其与第一管路701的进口端700a连通,以将进口端700a和储存腔本体连通,提供臭氧。
164.工作时,释放端紧闭,进入端与臭氧发生装置600相连通,臭氧发生装置600运行一段时间过后,产生的臭氧暂存在储存腔本体内;此时,打开释放端,臭氧进入输送通道700
中,以对待清洁件进行消毒灭菌处理;在不需要对其进行消毒灭菌处理时,关闭进口端700a和释放端,将多余的臭氧暂存在储存腔本体内,以便于为下次消毒灭菌处理作准备,避免造成臭氧的浪费。
165.需要说明的是,该工作时,也可将释放端打开,并且该储存腔900本体的体积要大于输送通道700的流通面积,以使得臭氧发生装置600运行时产生的臭氧先暂存一部分在储存腔900本体内部,再通过释放端进入输送通道700中;采用此种方式,可以减少臭氧的浪费,且更加有利于对各待清洁件的消毒灭菌处理。
166.此外,也可将上述储存腔900通过管路直接与各待清洁件连通,且该储存腔900设于基座101的背部,减少部件的使用,进而减少成本的投入。
167.另一种可选的实施例,当发生器采用清洁机器人200内部自带的臭氧发生装置600时;参见图6a所示,当清洁机器人200停靠在停靠位时,第一管路701贯穿背板103并与臭氧发生装置600连通,其余结构与臭氧发生装置600设在基站100内的结构相同,即当发生器采用清洁机器人200内部自带的臭氧发生装置600时,其也可以运用上述实施方式中的输送通道700和调节件800,可参见图6a-图6j。
168.此外,当发生器采用清洁机器人200内部自带的臭氧发生装置600时,储存腔本体与臭氧发生装置600相对的一侧采用圆弧形,以便于与清洁机器人200连接,且在该圆弧面的中间侧开设有进入端,其与臭氧发生装置600的出口连通,储存腔900远离清洁机器人200的一侧采用平整面,且与臭氧进口相对的一侧设有释放端,其与第一管路701的进口端700a连通,以将输送通道700与储存腔本体连通,以提供臭氧。
169.除此之外,考虑到臭氧泄露对人体可能造成损伤,清洁清洁部202噪声大导致用户体验感差,以及清洁清洁部202过程污水容易外溅多种问题,基站100还包括:
170.遮挡组件104,基座101还具有供清洁机器人200进入的入口,遮挡组件104包括至少一门板1041,参见图6a-6h所示,所有门板1041均能够开合地设置在该入口处,并在闭合时,使得基座101内部形成完全闭合的密封腔801b,以防止臭氧泄露至基座101外部,也能减少可能存在的噪音外传,具有密封特点,用户体验感好。
171.为了进一步实现智能化,可以让遮挡组件104在入口处自动开合。
172.其中,基站100可以自动感应清洁机器人200,在清洁机器人200进入基站100前打开门板1041,在进入基站100后关闭门板1041。
173.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本公开的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
174.在本公开中,除非另有明确的规定和限定,术语“装配”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本公开中的具体含义。
175.在本说明书的描述中,参考术语“一些实施例”、“示例地”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本公开的至少一个实施例或示例
中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
176.尽管上面已经示出和描述了本公开的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本公开的限制,本领域的普通技术人员在本公开的范围内可以对上述实施例进行变化、修改、替换和变型,故但凡依本公开的权利要求和说明书所做的变化或修饰,皆应属于本公开专利涵盖的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。