1.本发明涉及光学测试技术领域,尤其涉及一种星光模拟器几何参数现场校准装置及系统。
背景技术:
2.航天器利用星光定位导航技术是航天器自主导航的一种新的方法。它不依赖于无线电和gps等导航手段,在航天器进行深空探测和绕地飞行中都有着非常重要的应用,因此,国内外都在对天文导航技术进行深入的研究。但是航天器利用天文定位导航技术的实验研究不仅难度很大而且成本昂贵,因此国内外均采用地面半物理仿真进行实验研究。利用航天器天文导航半物理仿真模拟实验系统,可以深入研究航天器的关键定位导航技术,准确模拟量测信息及其误差特性,从而精确验证天文导航方法的有效性和准确性并进行系统精度分析。
3.星光模拟器作为星敏感器的地面参数校正和功能检测设备,对星敏感器的定位精度有很大影响。所以,星光模拟器的调校是一项非常重要的工作。由于恒星可以看作是无穷远处的点光源,故星敏感器实际工作时,会将星光作为平行光处理,所以星光模拟器的出射光必须为平行光,实际中,星光模拟器一般通过将点光源放置在平行光管的焦面上来产生平行光。由于各种误差的存在,直接采用这种方式产生的平行光的平行度误差较大,所以需要对星光模拟器进行校正,使其出射光的平行度能够满足星敏感器地面测试的要求。
4.星光模拟器平行度校正常规的方法是采用光学元件加光学自准直仪的方式进行调校,单星光源出射光经过光学系统出射形成具有一定视场角的平行光,光学元件放置在一维导轨上,光学元件由星光模拟器的出光口一侧平移至另外一侧,在此过程中将出射平行光转折90
°
进入光学自准直仪,由人眼配合自准直仪分划板读出单星光点在五棱镜移动过程中的移动角度差,记为平行度值,但是这种方法存在单星光源能量弱、人眼对准及读数误差、自准直仪自身调校误差等,测量不确定度值比较大,对于高精度的星光模拟器,此测量不确定度数值已经无法满足设计和仿真的要求,且此方法操作复杂,对调校场地要求较高。
技术实现要素:
5.本发明提供了一种星光模拟器几何参数现场校准装置及系统,以解决现有技术中存在的星光模拟器校准存在的误差大、精度低的问题。
6.一种星光模拟器几何参数现场校准装置,包括光学元件、平移机构、图像采集装置及数据处理装置;
7.所述光学元件安装于所述平移机构上,所述图像采集装置安装于所述平移机构的一端;
8.所述光学元件用于将待校准星光模拟器的出射光进行折转,所述平移机构用于带动所述光学元件和所述图像采集装置进行平移,平移过程中所述图像采集装置用于采集出
射光经所述光学元件折转后形成的星光图像并发送至所述数据处理装置,所述数据处理装置用于根据所述星光图像计算所述待校准星光模拟器的平行度。
9.进一步地,所述光学元件为五棱镜。
10.进一步地,所述图像采集装置为ccd相机。
11.进一步地,所述平移机构的行程为300mm,平直度为0.01mm至300mm。
12.进一步地,所述数据处理装置为工控计算机。
13.进一步地,所述校准装置还包括光学平台,所述平移机构设置于所述光学平台上。
14.进一步地,所述待校准星光模拟器的平行度通过以下公式进行计算:
15.α=|n
1-n2|
×
α0;
16.其中,n1为待校准星光模拟器一端星点像质中心像素坐标;n2为待校准星光模拟器另一端星点像质中心像素坐标;α0为待校准星光模拟器单个像素对应角度,α为待校准星光模拟器的平行度。
17.一种星光模拟器几何参数现场校准系统,包括上述的星光模拟器几何参数现场校准装置,还包括待校准星光模拟器。
18.本发明提供的星光模拟器几何参数现场校准装置及系统,至少包括如下有益效果:
19.(1)无需使用准直仪,避免人眼对准和读书误差,提高星光模拟器平行度校准的准确性和可靠性;
20.(2)可适用于高精度的星光模拟器,可以提供水平和竖直方向上星光模拟器的平行度数值,为星光模拟器装调提供实时精确的几何光学信息,保证星光模拟器出射光的准直度。
附图说明
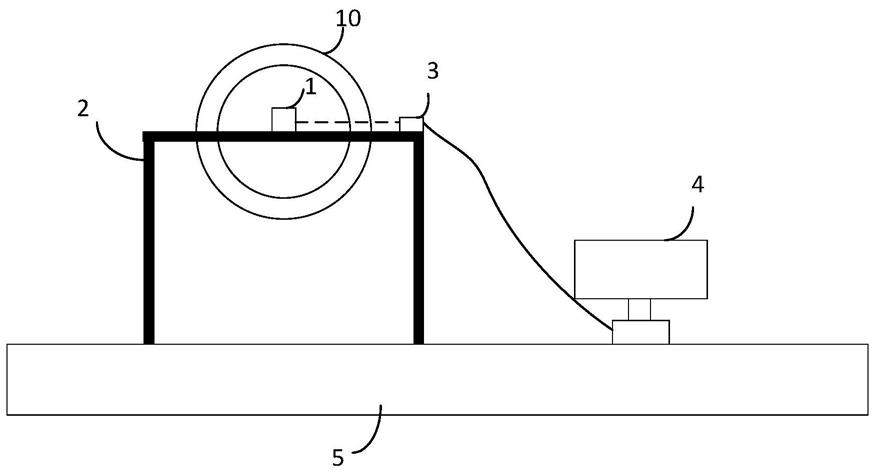
21.图1为本发明提供的星光模拟器几何参数现场校准系统一种实施例的结构示意图。
具体实施方案
22.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
23.参考图1,在一些实施例中,提供一种星光模拟器几何参数现场校准装置,包括光学元件1、平移机构2、图像采集装置3及数据处理装置4;
24.光学元件1安装于平移机构2上,图像采集装置3安装于平移机构2的一端;
25.光学元件1用于将待校准星光模拟器10的出射光进行折转,平移机构2用于带动光学元件1和图像采集装置3进行平移,平移过程中图像采集装置3用于采集出射光经光学元件1折转后形成的星光图像并发送至数据处理装置4,数据处理装置4用于根据星光图像计算待校准星光模拟器10的平行度。
26.在一些实施例中,光学元件1为五棱镜,五棱镜可以采用埃德蒙特25mm
×
25mm标准通光口径五棱镜,折转光轴精度为0.1
″
。
27.五棱镜为2次反射棱镜,经由五棱镜反射后星光模拟器成像坐标系不变,无镜像和
倒像,仅光轴折转90
°
,并由出光口出射,配合平移机构可以实现星光模拟器出光口推扫采样。
28.在一些实施例中,图像采集装置3为ccd相机,工作波段为可见光波段,ccd相机具体可以为hik的400万像素ccd工业面阵相机,镜头焦距15mm,有效分辨率为1980
×
1980。
29.在一些实施例中,平移机构2为江云光电高精度一维平移机构,行程为300mm,平直度为0.01mm至300mm,可实现水平和垂直两个方向的平移。
30.在一些实施例中,数据处理装置4为工控计算机。
31.在一些实施例中,校准装置还包括光学平台5,平移机构2和数据处理装置4设置于光学平台5上。
32.在一些实施例中,校准装置的工作原理如下:
33.待校准星光模拟器10模拟星光光源,亮度调节到最大值,待校准星光模拟器10的出光口对准光学元件1,图像采集装置3的镜头对准光学元件1,数据处理装置4控制平移机构2进行水平和垂直的推扫,推扫过程中待校准星光模拟器10的出射光经光学元件1折转90
°
后形成星光图像,图像采集装置3采集该星光图像,并发送至数据处理装置4,数据处理装置根据该星光图像计算待校准星光模拟器10的平行度,待校准星光模拟器的平行度通过以下公式进行计算:
34.α=|n
1-n2|
×
α0;
35.其中,n1为待校准星光模拟器一端星点像质中心像素坐标;n2为待校准星光模拟器另一端星点像质中心像素坐标;α0为待校准星光模拟器单个像素对应角度,α为待校准星光模拟器的平行度。
36.在一些实施例中,还提供一种星光模拟器几何参数现场校准系统,包括上述的星光模拟器几何参数现场校准装置,还包括待校准星光模拟器10。
37.在一些实施例中提供的星光模拟器几何参数现场校准装置及系统,至少包括如下有益效果:
38.(1)无需使用准直仪,避免人眼对准和读书误差,提高星光模拟器平行度校准的准确性和可靠性;
39.(2)可适用于高精度的星光模拟器,可以提供水平和竖直方向上星光模拟器的平行度数值,为星光模拟器装调提供实时精确的几何光学信息,保证星光模拟器出射光的准直度。
40.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。