1.本发明涉及机械运动平台设计领域,具体而言,涉及一种三维真空运动系统及其应用。
背景技术:
2.现有技术中常用的x轴、y轴和z轴的三维运动是采用“旋转电机 滚珠丝杠”的方式,这种电机不能在真空及高温环境下使用,且滚珠丝杠高温下一变形,运动精度无法满足。另外。现有技术中有采用“多自由度平台”的运动方式,这种运动在空间内可实现多维非线性运动,获得复杂多变路径,但仍存在电机无法在真空、高温下应用的问题,且装配难度高、占用空间大、运动过程难控制,故障频发。市场上有用于真空下的电机,但这种电机功率较小,一般为0.75kw,无法承载大的载荷,且工作温度温度一般不能超过150℃。
3.鉴于此,特提出本技术。
技术实现要素:
4.本发明的目的包括,例如,提供了一种三维真空运动系统,其可以实现大载荷、高速度、高精度的三维运动,且在高温、高真空、长时间下服役下稳定运行,该系统具安装简单、容易控制、容错率高等特点。
5.本发明的目的包括,例如,提供了一种三维真空运动系统在3d打印设备、真空镀膜设备或真空冶金设备中的应用。
6.本发明的实施例可以这样实现:
7.第一方面,本发明实施例提供一种三维真空运动系统,其包括:设置于真空腔内的运动组件和设置于真空腔外且用于驱动所述运动组件运动的驱动组件;
8.所述驱动组件包括真空动密封件、直线轴承、电动缸和电机,所述电动缸与所述电机连接,所述真空动密封件的两端分别与所述电动缸的推力杆和所述直线轴承连接;
9.所述运动组件包括x轴运动装置、y轴运动装置和z轴运动装置,所述x轴运动装置与所述y轴运动装置连接,所述z轴运动装置与所述x轴运动装置或所述y轴运动装置连接;所述驱动组件为三个且分别用于驱动所述x轴运动装置、所述y轴运动装置和所述z轴运动装置。
10.在可选的实施方式中,所述真空动密封件包括呈阶梯型的内筒,所述内筒包括进口段和出口段,所述进口段的直径小于所述出口段的直径,所述电动缸的推力杆安装于所述进口段,所述直线轴承安装于所述出口段。
11.在可选的实施方式中,所述真空动密封件还包括至少一个密封圈,所述密封圈安装于所述进口段内且位于所述电动缸的推力杆和所述直线轴承之间。
12.在可选的实施方式中,所述的真空腔内压力环境为-106pa~-103pa,真空腔内温度环境为-10℃~200℃。
13.在可选的实施方式中,所述x轴运动装置包括第一导轨、第一滑块、载物板和第一
连接杆,所述第一滑块固定连接至所述载物板的下表面,所述第一滑块可滑动地连接至所述第一导轨,所述第一连接杆与所述载物板的一端固定连接;
14.所述y轴运动装置包括第二导轨、第二滑块、连接板和第二连接杆,所述第二滑块固定连接至所述连接板的下表面,所述第二滑块可滑动地连接至所述第二导轨,所述第二连接杆与所述连接板的一端固定连接;
15.所述z轴运动装置包括导向柱、承载支架和第三连接杆,所述导向柱用于固定于所述真空腔的内侧壁,所述承载支架可滑动地安装于所述导向柱,所述第三连接杆与所述承载支架的中心固定连接;
16.所述第一导轨固定安装于所述连接板的上表面,所述第二导轨固定安装于所述承载支架的上表面,三个所述驱动组件的所述直线轴承分别与所述第一连接杆、所述第二连接杆和所述第三连接杆连接,三个所述驱动组件的所述电动缸分别与所述第一连接杆、所述第二连接杆和所述第三连接杆平行。
17.在可选的实施方式中,所述连接板的一侧设置有u型凹槽,所述u型凹槽位于所述第一连接杆的正下方。
18.在可选的实施方式中,所述第一连接杆长度l1与y轴方向运动行程ly及z轴方向运动行程lz符合l
12
=(1/2ly)2 l
z2
关系;
19.优选地,所述第二连接杆的长度l2等于z轴方向运动行程lz。
20.在可选的实施方式中,所述第一连接杆和所述载物板之间以及所述第一连接杆和所述驱动组件之间均设置有第一万向节;
21.所述第二连接杆和所述连接板之间以及所述第二连接杆和所述驱动组件之间均设置有第二万向节。
22.在可选的实施方式中,所述第一导轨、所述第二导轨、所述第一滑块、所述第二滑块、所述第一万向节和所述第二万向节均为耐高温的刚性材料制成;
23.优选地,所述耐高温的刚性材料为镍基合金或铁基合金。
24.第二方面,本发明实施例提供如前述实施方式任一项所述的三维真空运动系统在3d打印设备、真空镀膜设备或真空冶金设备中的应用。
25.本发明实施例的有益效果包括,例如:
26.本技术提供的三维真空运动系统通过将运动组件设置于真空腔内,将驱动组件设置于真空腔外,并利用真空动密封件实现真空腔内和真空腔外的有效密封,直线轴承和电动缸的配合,可以有效使得电机的转动变为直线运动,更好的驱动真空腔内的运动组件沿着其特定的方向进行运动。本技术中的三维真空运动系统能够在高真空-106pa~-103pa,温度环境-10℃~200℃环境下进行三维运动,可满足大载荷>0.5t、高速度200mm/s的运动需求,该三维真空运动系统的运动方法可以实现大载荷、高速度、高精度的三维运动,且在高温、高真空、长时间下服役下稳定运行,该系统具安装简单、容易控制、容错率高等特点。本技术提供的三维真空运动系统可以广泛应用于3d打印设备、真空镀膜设备或真空冶金设备中。
附图说明
27.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附
图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
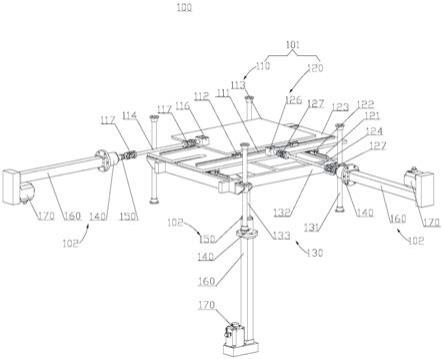
28.图1为本实施例提供的三维真空运动系统的结构示意图;
29.图2为本实施例提供的三维真空运动系统的x轴运动装置的结构示意图;
30.图3为本实施例提供的三维真空运动系统的y轴运动装置的结构示意图;
31.图4为本实施例提供的三维真空运动系统的z轴运动装置的结构示意图;
32.图5为本实施例提供的三维真空运动系统的真空动密封件的结构示意图。
33.图标:100-三维真空运动系统;101-运动组件;102-驱动组件;110-x轴运动装置;111-第一导轨;112-第一滑块;113-载物板;114-第一连接杆;115-第一支撑块;116-第一连接块;117-第一万向节;120-y轴运动装置;121-第二导轨;122-第二滑块;123-连接板;124-第二连接杆;125-第二支撑块;126-第二连接块;127-第二万向节;128-u型凹槽;130-z轴运动装置;131-导向柱;132-承载支架;133-第三连接杆;140-真空动密封件;141-内筒;142-进口段;143-出口段;144-密封圈;150-直线轴承;160-电动缸;170-电机。
具体实施方式
34.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
35.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
37.在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
39.需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
40.实施例
41.请参阅图1,本实施例提供了一种三维真空运动系统100,其包括:运动组件101和驱动组件102。运动组件101设置于真空腔内,驱动组件102设置于真空腔外且用于驱动运动组件101运动;运动组件101包括从上至下依次设置的x轴运动装置110、y轴运动装置120和z轴运动装置130;驱动组件102为三个且分别用于驱动x轴运动装置110、y轴运动装置120和z轴运动装置130。
42.下面将详细阐述x轴运动装置110、y轴运动装置120、z轴运动装置130以及驱动组件102的具体结构以及连接关系。
43.请结合参阅图1和图2,x轴运动装置110包括第一导轨111、第一滑块112、载物板113和第一连接杆114,第一滑块112固定连接至载物板113的下表面,具体来说,本实施例中载物板113为长方形结构,其底部的四个角处固定连接有第一支撑块115,4个第一支撑块115与4个第一滑块112固定连接,第一滑块112可滑动地连接至第一导轨111,本实施例中第一导轨111为两根,每根上分布两个第一滑块112,第一连接杆114与载物板113的一端固定连接。具体来说,在本实施例中,通过在载物板113的上部单侧中心位置处固定设置第一连接块116,通过将第一连接杆114与第一连接块116固定连接以实现将载物板113与第一连接块116杆进行固定,连接更紧密。此外,第一连接杆114和载物板113之间以及第一连接杆114和驱动组件102之间均设置有第一万向节117。
44.请结合参阅图1和图3,y轴运动装置120包括第二导轨121、第二滑块122、连接板123和第二连接杆124,第二滑块122固定连接至连接板123的下表面,具体来说,本实施例中连接板123为长方形结构,其底部的四个角处固定连接有第二支撑块125,4个第二支撑块125与4个第二滑块122固定连接,第二滑块122可滑动地连接至第二导轨121,本实施例中第二导轨121为两根,每根上分布两个第二滑块122,第二连接杆124与连接板123的二端连接;具体来说,在本实施例中,通过在连接板123的上部单侧中心位置处固定设置第二连接块126,通过将第二连接杆124与第二连接块126固定连接以实现将连接板123与第二连接块126杆进行固定,连接更紧密。此外,第二连接杆124和连接板123之间以及第二连接杆124和驱动组件102之间均设置有第二万向节127。
45.本技术采用的第一万向节117和第二万向节127即万向接头,具体来说,是十字万向节。其是实现变角度动力传递的机件,用于需要改变传动轴线方向的位置,它是本发明驱动系统的万向传动装置的“关节”部件,万向节与连接杆的组合即为万向节传动装置,可实现向前驱动和向各方向转向的功能。本发明中的万向节可根据运动轨迹需要实现x轴或y轴的运动。
46.本技术采用的第一导轨111和第二导轨121是用来支撑和引导运动部件,按给定的方向做往复直线运动,本发明指的是滚动摩擦导轨。
47.本实施例中,由于x轴运动装置110设置于y轴运动装置120的上方,因此,本实施例还在连接板123的一侧设置有u型凹槽128,u型凹槽128位于第一连接杆114的正下方。这样设置的目的在于y轴的电动缸160可以带动x轴运动装置110向四周运动,使得在运动时x轴运动装置110的第一万向节117及第一连接杆114可以在u型凹槽内自由活动。此外,这样的设置可以减小x轴运动装置110和y轴运动装置120的间隙以及x轴运动装置110和y轴运动装置120的厚度,进而缩小三维真空运动系统100的整体体积。
48.请结合参阅图1和图4,z轴运动装置130包括导向柱131、承载支架132和第三连接杆133,导向柱131用于固定于真空腔的内侧壁起到支撑整个三维真空运动系统100和对承载支架132进行导向的作用,本实施例中导向柱131为4个,承载支架132的四个角分别可滑动地安装于4个导向柱131,第三连接杆133与承载支架132的中心连接。
49.请参阅图1和图5,驱动组件102包括真空动密封件140、直线轴承150、电动缸160和电机170,电动缸160与电机170连接,真空动密封件140的两端分别与电动缸160的推力杆和
直线轴承150连接;真空动密封件140包括呈阶梯型的内筒141,内筒141包括进口段142和出口段143,进口段142的直径小于出口段143的直径,电动缸160的推力杆安装于进口段142,直线轴承150安装于出口段143,也即是,电动缸160的推力杆的外径等于进口段142的内径,直线轴承150的外径等于出口段143的内径。真空动密封件140还包括至少一个密封圈144,密封圈144安装于进口段142内且位于电动缸160的推力杆和直线轴承150之间。
50.在各种真空设备中,把运动传递到真空容器中所需要的密封连接,称为真空动密封连接,由于真空动密封连接必须保证外界环境不向真空容器内漏气,为此本发明设置了两个密封槽,槽内安装了密封圈144。
51.本技术采用的电动缸160是将伺服电机170与丝杠一体化设计的模块化产品,是将伺服电机170的旋转运动转换成直线运动,同时将伺服电机170最佳优点精确转速控制,精确扭矩控制转变成精确速度控制,精确位置控制,精确推力控制,实现高精度直线运动。并且电动缸160具有高刚性,抗冲击力,超长寿命,操作维护简单,故障率低等特点,可在恶劣环境下使用。
52.第一导轨111固定安装于连接板123的上表面,第二导轨121固定安装于承载支架132的上表面;三个驱动组件102的直线轴承150分别与第一连接杆114、第二连接杆124和第三连接杆133连接,具体来说,三个驱动组件102的直线轴承150分别与第一万向节117、第二万向节127以及第三连接杆133连接。三个驱动组件102的电动缸160分别与第一连接杆114、第二连接杆124和第三连接杆133平行,实现电动缸160直接驱动第一连接杆114、第二连接杆124和第三连接杆133运动。
53.进一步地,第一连接杆114长度l1与y轴方向运动行程ly及z轴方向运动行程lz符合l
12
=(1/2ly)2 l
z2
关系;这样设置的目的是因为x轴的第一连接杆114的长度是由y轴的运动行程和z轴的运动行程共同决定的。第二连接杆124的长度l2等于z轴方向运动行程lz。这样设置的目的是因为y轴的第二连接杆124的长度是由z轴的运动行程所决定的。
54.真空腔内压力环境为-106pa~-103pa,真空腔内温度环境为-10℃~200℃。
55.在可选的实施方式中,第一导轨111、第二导轨121、第一滑块112、第二滑块122、第一万向节117和第二万向节127均为耐高温的刚性材料制成;采用耐高温材料的目的是防止在高温时材料变形。优选地,耐高温的刚性材料为镍基合金或铁基合金。
56.应理解,本技术中x轴运动装置110、y轴运动装置120和z轴运动装置130从上至下依次设置仅仅是本技术的一个实施方式,在其他实施方式中,还可以将z轴运动装置130、x轴运动装置110和y轴运动装置120从上至下依次设置,对应的修改其安装位置即可。
57.本技术提供的三维真空运动系统100的工作原理是:x轴方向运动:第一电动缸160通过第一万向节117将驱动力传递给第一连接杆114,第一连接杆114将驱动力转化后通过第一万向节117传递给载物板113,载物板113在驱动力的作用下沿第一导轨111做x轴方向的直线运动;y轴方向运动:第二电动缸160通过第二万向节127将驱动力传递给第二连接杆124,第二连接杆124将驱动力转化后通过第二万向节127传递给连接板123,连接板123在驱动力的作用下沿第二导轨121做y轴方向的直线运动,位移为δy,由于第一导轨111设置于连接板123上,因此,连接板123运动时会带动第一导轨111做y轴方向运动,第一导轨111上的第一滑块112带动载物板113做x轴方向和y轴方向的复合运动,x轴方向的位移为δ
x
,载物板113通过第一万向节117使第一连接杆114做y轴方向的偏移δy,第一电动缸160运动补差δ
x
;z
轴方向运动:第三电动缸160驱动承载支架132做z轴方向的运动,位移为δz,承载支架132同时带动连接板123和载物板113做z轴方向运动,连接板123通过第二万向节127带动第二连接杆124做z轴方向的偏移δz,连接板123做y轴方向的运动,位移为δ
y1
,第二电动缸160运动补差δ
y1
;载物板113通过第一万向节117带动第一连接杆114做z轴方向的偏移δz,载物板113做x轴方向的运动,位移为δ
x1
,第一电动缸160运动补差δ
x1
。在本发明的实施例中,通过控制x轴方向运动、y轴方向运动、z轴方向运动可以实现三维运动轨迹。
58.综上所述,本技术提供的三维真空运动系统100通过将运动组件101设置于真空腔内,将驱动组件102设置于真空腔外,并利用真空动密封件140实现真空腔内和真空腔外的有效密封,直线轴承150和电动缸160的配合,可以有效使得电机170的转动变为直线运动,更好的驱动真空腔内的运动组件101沿着其特定的方向进行运动。本技术中的三维真空运动系统100能够在高真空-106pa~-103pa,温度环境-10℃~200℃环境下进行三维运动,可满足大载荷>0.5t、高速度200mm/s的运动需求,该三维真空运动系统100的运动方法可以实现大载荷、高速度、高精度的三维运动,且在高温、高真空、长时间下服役下稳定运行,该系统具安装简单、容易控制、容错率高等特点。本技术提供的三维真空运动系统100可以广泛应用于铝合金液态3d打印设备、塑料3d打印设备、真空镀膜设备或真空冶金设备中。例如,应用于真空镀膜设备上时,真空腔内压力环境为-106pa,真空腔内温度环境是指200℃。应用于塑料3d打印上时,真空腔内压力环境为-102pa,真空腔内温度环境是指30℃。
59.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。