1.本实用新型涉及机器人技术领域,具体为一种喷气式灭火机器人。
背景技术:
2.当计算机房、配电室、精密仪器室、化学易燃品库房、图书馆以及资料库、等场所发生火灾时,普通泡沫或干粉灭火器会对一些重要设备或资料造成二次损伤,且灭火人员在现场使用灭火器进入火灾现场进行灭火也存在一定的危险,因此本实用新型提出了一种喷气式灭火机器人。
技术实现要素:
3.本实用新型的目的是为了解决一些特殊场所发生火灾时,普通泡沫或干粉灭火器会对重要设备或资料造成二次损伤且灭火人员使用灭火器进行灭火时存在一定危险的问题。
4.为了达到上述目的,本实用新型提出了一种喷气式灭火机器人,包括壳体和连杆,其特征还包括设置在壳体内的压力仓与动力仓、安装在动力仓内的电机、与电机连接的连杆、安装在连杆另一端的轮子、安装在壳体上的喷气组件、安装在支架顶部的喷器组件连接的支撑组件以及与喷气组件连接的调节组件;所述轮子的外部设置有防火涂层;所述动力仓内安装有与其他组件连接的控制器、用于接收信号的信号接收器以及安装在动力仓内为其他组件提供电能的蓄电池。
5.作为优选,所述调节组件包括设置在壳体顶部的导向槽、安装在导向槽内的支撑板、安装在导向槽内位于两块支撑板之间且与导向槽相适配的导向块、安装在支撑板上的横板、安装在支撑板和导向块上的气缸以及设置在气缸上的伸缩杆;所述安装在支撑板上的气缸的伸缩杆与导向块连接;所述安装在导向块上的气缸的伸缩杆与喷气组件中的喷枪连接;所述喷枪还与支撑组件连接。
6.作为优选,所述横板上设有移动孔;所述支撑板上设有与导向槽相适配的定位板;所述导向槽内设有与定位板相适配的定位槽。
7.作为优选,所述支撑组件包括安装在壳体顶部的支架、安装在支架顶部的万向球台、安装在万向球台上的万向球、安装在万向球台上与万向球连接的端盖以及通过螺纹连接安装在万向球上的喷枪架;所述喷枪架上设有与喷枪连接的安装孔以及用于固定喷枪的固定螺栓。
8.作为优选,所述万向球台上设有与万向球相适配的弧形凹槽;所述端盖上也设有与万向球相适配的弧形通孔。
9.作为优选,所述喷气组件还包括连接喷枪与压力仓的连接管、设置在连接管与压力仓连接处的气体减压阀、设置在壳体一侧与压力仓连接的充气阀和安全泄压阀。
10.作为优选,所述壳体的另一侧活动连接有摄像头,且摄像头上的外部安装有防火玻璃罩;所述压力仓内的气体为二氧化碳气体。
11.本实用新型的有益效果:通过二氧化碳气体进行灭火,不仅可以保护一些特殊场所的仪器设备和资料等,而且二氧化碳气体不会对环境造成污染;
12.通过人远程操控机器人进行灭火,灭火人员不需要进入火灾现场,只需要通过控制端控制机器人进行灭火即可,不仅保护了灭火人员的安全,而且一些消防车、消防员无法进入的区域也能进行灭火,提高灭火效率且保证火灾现场的火完全熄灭;
13.通过摄像头的设置,使操作员可以清楚的观察到火灾现场的情况,进行更准确的操作,且通过防火玻璃罩对摄像头进行保护,避免摄像头的损坏。
附图说明
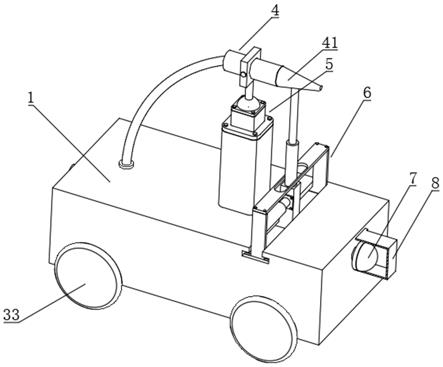
14.图1是本实用新型的整体结构示意图;
15.图2是本实用新型壳体的剖视图;
16.图3是本实用新型动力仓的剖视图;
17.图4是本实用新型调节组件的示意图;
18.图5是本实用新型中图2的局部放大图;
19.图6是本实用新型支撑组件的剖视图;
20.图7是本实用新型喷气组件的示意图。
21.图中标识:壳体1、压力仓2、动力仓3、电机31、连杆32、轮子33、防火涂层34、控制器35、信号接收器36、蓄电池37、喷气组件4、喷枪41、连接管42、气体减压阀43、充气阀44、安全泄压阀45、支撑组件5、支架51、万向球台52、万向球53、端盖54、喷枪架55、安装孔56、固定螺栓57、弧形凹槽58、弧形通孔59、调节组件6、导向槽60、支撑板61、导向块62、横板63、气缸64、伸缩杆65、移动孔66、定位板67、定位槽68、摄像头7、防火玻璃罩8。
具体实施方式
22.下面我们通过实施方式并结合附图对实用新型所述的一种喷气式灭火机器人做进一步的说明。
23.参阅附图1-3所示,本实用新型中一种喷气式灭火机器人,包括壳体1和连杆32,其特征还包括设置在壳体1内的压力仓2与动力仓3、安装在动力仓3内的电机31、与电机31连接的连杆32、安装在连杆32另一端的轮子33、安装在壳体1上的喷气组件4、安装在支架51顶部的喷器组件连接的支撑组件5以及与喷气组件4连接的调节组件6;所述轮子33的外部设置有防火涂层34;所述动力仓3内通过螺栓安装有与其他组件连接的控制器35、用于接收信号的信号接收器36以及通过螺栓安装在动力仓3内为其他组件提供电能的蓄电池37;本实用新型通过防火涂层34,使轮子33具备防火功能,保证机器人在火灾现场移动时轮子33可以正常使用;通过电机31带动连杆32转动,通过连杆32带动轮子33转动,通过开启一个电机31关闭另一个电机31使机器人进行转向。
24.参阅附图4-5所示,本实用新型中所述调节组件6包括设置在壳体1顶部的导向槽60、安装在导向槽60内的支撑板61、安装在导向槽60内位于两块支撑板61之间且与导向槽60相适配的导向块62、通过螺栓安装在支撑板61上的横板63、通过螺栓安装在支撑板61和导向块62上的气缸64以及设置在气缸64上的伸缩杆65;所述安装在支撑板61上的气缸64的伸缩杆65与导向块62连接;所述安装在导向块62上的气缸64的伸缩杆65与喷气组件4中的
喷枪41连接;所述喷枪41还与支撑组件5连接;本实用新型通过导向块62上的气缸64控制该气缸64的伸缩杆65,该伸缩杆65与喷枪41连接从而带动喷枪41上下移动切配合支撑板上的气缸64控制该气缸64的伸缩杆65,该伸缩杆65与导向块62连接,从而带动导向块62沿着导向槽60左右移动,带动导向块62上的气缸64进行左右移动,从而控制喷枪41左右移动,从而使喷枪41进行旋转,使喷枪41可以对准火苗根部进行喷气灭火;本实用新型通过导向槽60的设置,对导向块62起导向作用,使导向块62的安装更加简便。
25.参阅附图4-5所示,本实用新型中所述横板63上设有移动孔66;所述支撑板61上设有与导向槽60相适配的定位板67;所述导向槽60内设有与定位板67相适配的定位槽68;本实用新型通过移动66的设置,使导向块62上的气缸64在移动过程中不会与横板63发生干涉,保证该气缸64可以正常移动;通过定位槽68的设置,对定位板67进行定位配合导向槽60,使支撑61的拆装更加简便。
26.参阅附图4-5所示,调节组件6安装时,第一步,首先将一块支撑板61上的定位板67对准导向槽60并装入,且使支撑板61沿着导向槽60运动到导向槽60末端,将该定位板67插入定位槽68中,接着将导向块62对准导向槽60并插入导向槽60,再取另一块支撑板61相同方式插入另一个定位槽68中;第二步,将两个气缸64分别安装在支撑板61内侧与导向块60顶部,接着沿着导向槽60移动导向块62使支撑板61上的气缸64的伸缩杆65与导向块62通过螺栓固定连接;第三步,将横板63通过螺栓安装在两块支撑板61上,且使导向块62上的气缸64穿过移动孔66;第四步,将导向块62上的气缸64的伸缩杆65与喷枪41连接,且所有气缸64都与控制器35连接,由控制器35控制气缸64的开关。
27.参阅附图6所示,所述支撑组件5包括安装在壳体1顶部的支架51、安装在支架51顶部的万向球台52、安装在万向球台52上的万向球53、安装在万向球台52上与万向球53连接的端盖54以及通过螺纹连接安装在万向球53上的喷枪架55;所述喷枪架55上设有与喷枪41连接的安装孔56以及用于固定喷枪41的固定螺栓57;所述万向球台52上设有与万向球53相适配的弧形凹槽58;所述端盖54上也设有与万向球53相适配的弧形通孔59;本实用新型通过万向球台52上的弧形凹槽58与端盖54上的弧形通孔59配合,对万向球53进行限位,使万向球53在旋转移动过程中不会从弧形凹槽58中滚出;通过固定螺栓57对喷枪41进行锁紧固定,操作简单便于喷枪41的更换。
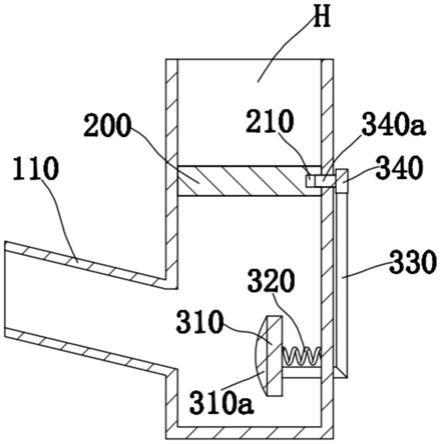
28.参阅附图1-7所示,所述喷气组件4还包括连接喷枪41与压力仓2的连接管42、设置在连接管42与压力仓2连接处的气体减压阀43、设置在壳体1一侧与压力仓2连接的充气阀44和安全泄压阀45;所述壳体1的另一侧活动连接有摄像头7,且摄像头7上的外部安装有防火玻璃罩8;所述压力仓2内的气体为二氧化碳气体;本实用新型通过安全泄压阀45的设置,保证压力仓2内的气压在安全气压,保证使用人员的安全;通过摄像头7操作者可以清楚的观察到火灾现场的情况,进行更准确的操作;通过防火玻璃罩8对摄像头进行保护,避免摄像头7的损坏,且不会影响摄像头7的视野。
29.参阅附图1-7所示,本实用通过工作时,机房发生火灾,房间内的烟雾传感器检测到火灾发生,传输信号给火灾报警控制器,火灾报警控制器发出警报信号,管理员收到报警信号马上拿着操控端前往机房,在管理员未达到火灾现场前,通过灭火机器人的摄像头7传回的摄像画面对火灾现场进行观察,确定灭火目标,然后管理员通过操控端发出控制信号,信号接收器36接收操控端发出的信号并传递给控制器35,控制器35收到信号后,控制电机
31开始转动,电机31的输出轴带动连杆32转动,连杆32转动带动轮子33转动,从而控制灭火机器人进行与后退,通过控制电机31一侧停止另一侧转动,来控制灭火机器人进行转向,从而控制灭火机器人移动到着火点附近。管理员根据摄像头7传回的摄像画面通过操控端发出控制信号,信号接收器36接受操控端发出的信号并传递给控制器35,控制器35收到信号后,控制控制支撑板61上的气缸64中的伸缩杆65进行伸缩,带动与伸缩杆65连接的导向块62进行运动,对导向块62位置进行调整,从而调整喷枪41的位置使喷枪41对准着火点,控制导向块62顶部的气缸64中的伸缩杆65进行伸缩带动喷枪41的一端进行运动,带动喷枪架55运动,带动万向球53运动,从而对喷枪41进行上下调整,使喷枪41对准着火点的根部,然后管理员通过操作端发出灭火信号,信号接收器36接受操控端发出的信号并传递给控制器35,控制器35控制气体减压阀43打开对着火点根部进行喷气灭火。管理员通过摄像头7传回的摄像画面,根据火势实时控制灭火机器人进行灭火;当完成灭火后,管理员进入机房,检查损失以及为灭火机器人充气,为下一次火灾做准备。
30.上述实施例是对本实用新型的说明,不是对本实用新型的限定,任何对本实用新型简单变换后的方案均属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。