1.本实用新型涉及智能搬运设备领域,尤其涉及一种具有自动抓取功能的智能搬运设备。
背景技术:
2.agv是automatedguidedvehicle的缩写,即“自动导引运输车”,是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,agv属于轮式移动机器人。目前国内外agv主要分为两种模式:一种是以欧美国家为首的全自动agv技术,路径规划和生产流程复杂多变,能够应用在几乎所有的搬运场合,但此类agv的销售价格高居不下,且不适合我国当下的生产水平;第二种是以日本为代表的简易型agv技术,成为agc(automatedguidedcart),该技术追求的是简单实用,让用户在最短时间内收回投资成本,但agc只用来搬运,并不强调自动装卸功能,虽然价格低廉但同样不适合基础工业并不十分完善的我国,为了解决这些问题人们提出了一些列的智能搬运设备,以完善的解决传统搬运设备的问题;
3.随着科技的进步,人们也设置出了具有多种功能的且能够自行进行充电的智能搬运设备,其自动充电原理与可以自动充电的扫地机器人原理相同,当检测到自身电量不足时会自动移动至充点进行充电;
4.但是现有的自动充电的智能搬运设备通常需要一个放置在地上的与设备本身相匹配的插座,这样才能够使得设备完成自动充电的工作,而这种需要外加设备的自动充电的搬运设备在使用的时候不是很方便,例如放置在地上的插座需要人工手动调整位置并将其固定在地面上,操作繁琐,且在实际使用过程中由于目标较小,容易被人们踢坏,同时由于仓库内的回车较多,且这些灰尘极容易累积在地面上,从而设置在地面上的充电装置容易因为累积灰尘而使其容易损坏,使用寿命受到极大的限制,而通常各种仓库厂房内的墙壁上都会有安装插座,只是高低位置不同,因而利用厂房墙壁上的插座进行充电相对于单独设置一个安装在地面上的插座而言更加方便。
5.因此,有必要提供一种新的具有自动抓取功能的智能搬运设备解决上述技术问题。
技术实现要素:
6.为解决上述技术问题,本实用新型提供一种能够根据墙壁上安装的插座的高度调节自身插头的高度从而方便自动进行充电的具有自动抓取功能的智能搬运设备。
7.本实用新型提供的一种具有自动抓取功能的智能搬运设备,包括搬运车主体、机械臂夹爪、控制屏、连接槽、升降板、顶出板、插头、驱动升降机构和顶出机构,所述机械臂夹爪固定在搬运车主体顶部的一侧,所述控制屏固定在搬运车主体的一侧,所述连接槽设置在搬运车主体远离控制屏的一侧,所述升降板滑动连接在连接槽的内侧,所述顶出板滑动连接在升降板的顶部,所述插头固定在顶出板上表面远离控制屏的一侧,所述驱动升降机
构固定在连接槽的内壁,用于驱动升降板升降,所述顶出机构固定在连接槽的内壁,用于在升降板上升的过程中将顶出板向连接槽的外侧顶出;
8.所述驱动升降机构包括固定块、螺杆和电机,所述固定块固定在连接槽底部内壁的中部,所述螺杆通过轴承转动连接在固定块的中部,且螺杆远离固定块的一端与连接槽的内壁通过轴承转动连接,所述电机固定在连接槽内壁的一侧,且螺杆靠近电机的一端穿过固定块与电机的输出端固定。
9.优选的,所述驱动升降机构还包括移动块和驱动连杆,所述移动块通过螺纹孔螺纹连接在螺杆外壁的一端,且移动块与连接槽的内壁滚动连接,所述驱动连杆通过轴销转动连接在移动块的顶部,且驱动连杆远离移动块的一端通过轴销与升降板的底部转动连接。
10.优选的,所述顶出机构包括驱动斜板、拉块、弹簧和避让槽,所述驱动斜板固定在连接槽内部的中部,且驱动斜板靠近顶出板一侧的下端呈斜面设置,所述顶出板靠近驱动斜板的一侧与驱动斜板的表面挤压接触,所述拉块固定在升降板顶部的一侧所述弹簧固定在顶出板靠近拉块的一侧,所述弹簧远离顶出板的一端与拉块固定,所述避让槽开设在升降板靠近驱动斜板的一侧,所述避让槽与驱动斜板的位置相对应。
11.优选的,所述连接槽内壁的中部固定有滑轨,所述升降板靠近滑轨的一侧固定有第一滑条,所述第一滑条与滑轨的外壁滑动连接。
12.优选的,所述升降板顶部的一侧对称开设有滑槽,所述顶出板的底部对称固定有第二滑条,所述第二滑条与滑槽的内壁滑动连接。
13.优选的,所述移动块的底部通过轴销转动连接有滚轮,所述滚轮与连接槽的内壁滚动连接。
14.优选的,所述搬运车主体远离连接槽的一侧固定有防撞网。
15.优选的,所述电机为减速电机。
16.与相关技术相比较,本实用新型提供的具有自动抓取功能的智能搬运设备具有如下有益效果:
17.本实用新型提供一种具有自动抓取功能的智能搬运设备,通过将搬运车主体的充电用的插头固定在顶出板上,进而通过设置的驱动升降机构能够调节顶出板的高度,从而能够便于根据墙壁上的插座的高度来调节插头的高度,从而能够便于完成搬运车主体的自动充电工作,从而不需要单独设置一个放置在地上的充电接口装置,极大的方便了人们使用,且在升降板下降至最低位置时,插头能够收缩进入连接槽内,从而能够避免在搬运车主体移动的时候受到撞击造成插头损坏的现象发生,而在升降板上升的初期即能够通过顶出机构将插头从连接槽内向外侧顶出,便于完成充电工作。
附图说明
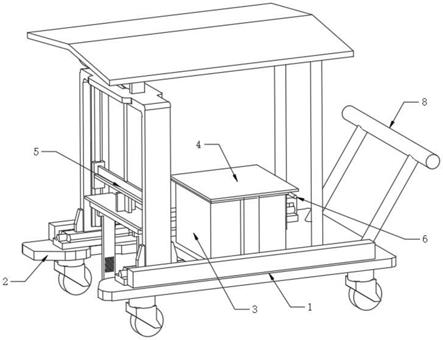
18.图1为本实用新型提供的整体结构示意图;
19.图2为本实用新型提供的插头位置结构示意图;
20.图3为本实用新型提供的驱动升降机构结构示意图;
21.图4为本实用新型提供的顶出机构结构示意图;
22.图5为本实用新型提供的a处放大图;
23.图6为本实用新型提供的避让槽位置结构示意图。
24.图中标号:1、搬运车主体;2、机械臂夹爪;3、控制屏;4、连接槽;5、升降板;6、顶出板;7、插头;8、驱动升降机构;81、固定块;82、螺杆;83、电机;84、移动块;85、驱动连杆;9、顶出机构;91、驱动斜板;92、拉块;93、弹簧;94、避让槽;10、滑轨;11、第一滑条;12、滑槽;13、第二滑条;14、滚轮;15、防撞网。
具体实施方式
25.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
26.以下结合具体实施例对本实用新型的具体实现进行详细描述。
27.请参阅图1、图2和图3,本实用新型实施例提供一种具有自动抓取功能的智能搬运设备,包括搬运车主体1、机械臂夹爪2、控制屏3、连接槽4、升降板5、顶出板6、插头7、驱动升降机构8和顶出机构9,所述机械臂夹爪2固定在搬运车主体1顶部的一侧,所述控制屏3固定在搬运车主体1的一侧,所述连接槽4设置在搬运车主体1远离控制屏3的一侧,所述升降板5滑动连接在连接槽4的内侧,所述顶出板6滑动连接在升降板5的顶部,所述插头7固定在顶出板6上表面远离控制屏3的一侧,所述驱动升降机构8固定在连接槽4的内壁,用于驱动升降板5升降,所述顶出机构9固定在连接槽4的内壁,用于在升降板5上升的过程中将顶出板6向连接槽4的外侧顶出;
28.所述驱动升降机构8包括固定块81、螺杆82和电机83,所述固定块81固定在连接槽4底部内壁的中部,所述螺杆82通过轴承转动连接在固定块81的中部,且螺杆82远离固定块81的一端与连接槽4的内壁通过轴承转动连接,所述电机83固定在连接槽4内壁的一侧,所述电机83为减速电机,且螺杆82靠近电机83的一端穿过固定块81与电机83的输出端固定。
29.请参阅图3,所述驱动升降机构8还包括移动块84和驱动连杆85,所述移动块84通过螺纹孔螺纹连接在螺杆82外壁的一端,且移动块84与连接槽4的内壁滚动连接,所述驱动连杆85通过轴销转动连接在移动块84的顶部,且驱动连杆85远离移动块84的一端通过轴销与升降板5的底部转动连接。
30.需要说明的是,通过将搬运车主体1的充电用的插头7固定在顶出板6上,进而通过设置的驱动升降机构8能够调节顶出板6的高度,从而能够便于根据墙壁上的插座的高度来调节插头7的高度,从而能够便于完成搬运车主体1的自动充电工作,从而不需要单独设置一个放置在地上的充电接口装置,极大的方便了人们使用。
31.请参阅图4、图5和图6,所述顶出机构9包括驱动斜板91、拉块92、弹簧93和避让槽94,所述驱动斜板91固定在连接槽4内部的中部,且驱动斜板91靠近顶出板6一侧的下端呈斜面设置,所述顶出板6靠近驱动斜板91的一侧与驱动斜板91的表面挤压接触,所述拉块92固定在升降板5顶部的一侧所述弹簧93固定在顶出板6靠近拉块92的一侧,所述弹簧93远离顶出板6的一端与拉块92固定,所述避让槽94开设在升降板5靠近驱动斜板91的一侧,所述避让槽94与驱动斜板91的位置相对应。
32.需要说明的是,在升降板5下降至最低位置时,插头7能够收缩进入连接槽4内,从而能够避免在搬运车主体1移动的时候受到撞击造成插头7损坏的现象发生,而在升降板5
上升的初期即能够通过顶出机构9将插头7从连接槽4内向外侧顶出,便于完成充电工作。
33.请参阅图4和图5,所述连接槽4内壁的中部固定有滑轨10,所述升降板5靠近滑轨10的一侧固定有第一滑条11,所述第一滑条11与滑轨10的外壁滑动连接,能够便于升降板5稳定的滑动。
34.请参阅图5,所述升降板5顶部的一侧对称开设有滑槽12,所述顶出板6的底部对称固定有第二滑条13,所述第二滑条13与滑槽12的内壁滑动连接,能够便于顶出板6滑动。
35.请参阅图3,所述移动块84的底部通过轴销转动连接有滚轮14,所述滚轮14与连接槽4的内壁滚动连接,能够便于移动块84更顺畅的移动。
36.请参阅图1,所述搬运车主体1远离连接槽4的一侧固定有防撞网15,能够有效地保护搬运车主体1,一定程度上避免其在运动的时候受到损坏。
37.本实用新型提供的具有自动抓取功能的智能搬运设备的工作原理如下:
38.使用的时候,当需要进行充电的时候,搬运车主体1自动移动至厂区墙壁上的插座前侧,进而通过驱动电机83转动,从而能够带动螺杆82转动,进而能够带动移动块84向靠近固定块81的一侧移动,进而能够推动驱动连杆85翻转,从而使得驱动连杆85远离移动块84的一侧向上移动,从而能够推动升降板5沿着滑轨10向上滑动,而在升降板5向上移动的初期,由于顶出板6受到了驱动斜板91斜面的推动,从而能够使得驱动斜板91沿着滑槽12向远离驱动斜板91的一侧滑动,直至将插头7的一端伸出连接槽4外侧,进而继续驱动电机83转动,调节插头7的位置与墙壁上的插座位置相对应,当插头7到达插座的位置时,通过驱动搬运车主体1向靠近墙体的一侧移动,将插头7插入到插座内进行充电工作;
39.充电结束后通过驱动搬运车主体1向远离墙面的一侧移动,从而将插头7从插座内拔出,进而通过驱动电机83反向转动,从而能够带动升降板5下降,直至将升降板5移动至最低位置,而在升降板5下降的过程中,在弹簧93回弹力的作用下能够拉动顶出板6移动至复位,从而将插头7拉动进连接槽4内侧,从而完成插头7的收缩工作;
40.本实用新型能够便于根据厂区内墙壁上的插座的位置高度调节搬运车主体1上的插头7的高度,从而不需要单独在地面上设置相应的插座装置来完成充电工作,极大的方便人们使用。
41.本实用新型中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
42.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。