1.本实用新型属于飞行器技术领域,具体涉及一种适用于多平台投放的可变体海空两栖探测系统。
背景技术:
2.海空两栖飞行器是指既能在空中飞行,又能依靠自身的浮力停留在水面上的一类飞行器。依靠强大的飞行能力和水面停留能力,这种飞行器不仅能在空中进行侦查探测作业,还能够在复杂的水面进行载荷装置的吊放与回收。在海洋军事及工程需求中,能够对重点区域的空中、水面和水下目标等进行侦查,在海洋勘测侦查、战场支援以及海洋救援等领域有着巨大的应用潜力。
3.海空两栖飞行器的主要特点在于能够实现空中、水面及水下作业需求。目前已有的两栖飞行器多数采用一体化设计,无法既满足作业需求又具备灵活便捷的折叠能力,因此无法实现快速和远距离投放。
技术实现要素:
4.针对现有技术存在的缺陷,本实用新型提供一种适用于多平台投放的可变体海空两栖探测系统,可有效解决上述问题。
5.本实用新型采用的技术方案如下:
6.本实用新型提供一种适用于多平台投放的可变体海空两栖探测系统,包括:控制系统、机身(1)、旋翼系统、分布式异形浮筒(2)和载荷投放系统;
7.所述旋翼系统包括旋翼收放动力装置、旋翼折叠展开机构和旋翼机构;
8.所述旋翼收放动力装置包括:上封装体(3)、收放步进电机(4)、丝杠(5)、十字螺母滑块(6a)和十字导向槽(6b);所述上封装体(3)固定安装于所述机身(1)的上方;所述上封装体(3)的顶部圆心轴线方向固定安装垂直设置的所述十字导向槽(6b),所述十字导向槽(6b)的内部同轴安装所述丝杠(5),所述丝杠(5)的外部螺纹旋合安装所述十字螺母滑块(6a),当所述丝杠(5)旋转时,带动所述十字螺母滑块(6a)沿所述十字导向槽(6b)进行升降运动;所述上封装体(3)的内部固定安装所述收放步进电机(4),并且,所述收放步进电机(4)的动力输出轴垂直穿过所述上封装体(3)的顶部圆心而与所述丝杠(5)的底部固定,用于驱动所述丝杠(5)旋转;
9.其中,所述十字螺母滑块(6a)具有四个呈十字形对称的螺母滑块铰接部;
10.所述旋翼折叠展开机构包括四个呈十字形对称分布的旋翼折叠展开单元;各个所述旋翼折叠展开单元沿所述上封装体(3)的顶部周向平均分布,并且,各个所述旋翼折叠展开单元的结构相同,均包括:主连接臂(7)、副连接臂(8)、浮筒拉杆(9)和动力拉杆(10);
11.在与对应的一个所述螺母滑块铰接部径向延长线平行的方向,在所述上封装体(3)的顶部边缘位置固定安装主连接臂安装孔(3-1),在所述主连接臂安装孔(3-1)的外部且低于所述主连接臂安装孔(3-1)的位置,固定安装副连接臂安装孔(3-2);
12.所述主连接臂(7)的内端通过所述主连接臂安装孔(3-1)与所述上封装体(3)铰接,所述主连接臂(7)的外端与浮筒拉杆(9)的上端铰接,所述副连接臂(8)位于所述主连接臂(7)的下方,并且与所述主连接臂(7)平行,所述副连接臂(8)的内端通过所述副连接臂安装孔(3-2)与所述上封装体(3)铰接,所述副连接臂(8)的外端与所述浮筒拉杆(9)的下端铰接,从而形成平行四边形结构;
13.所述浮筒拉杆(9)的下端固定安装所述分布式异形浮筒(2);在所述主连接臂(7)的中部设有动力拉杆铰接孔(7-1),所述动力拉杆(10)的上端与所述十字螺母滑块(6a)的一个螺母滑块铰接部铰接,所述动力拉杆(10)的下端通过所述动力拉杆铰接孔(7-1)与所述主连接臂(7)铰接;
14.当所述十字螺母滑块(6a)沿所述十字导向槽(6b)向上运动时,驱动所述动力拉杆(10)带动所述平行四边形结构绕所述主连接臂安装孔(3-1)向内旋转,从而使所述旋翼折叠展开机构实现折叠,使所述主连接臂(7)和所述副连接臂(8)形成竖直状态;同时,当折叠到位后,各个分布式异形浮筒(2)围在所述主连接臂(7)和所述副连接臂(8)的外部,并拼接形成筒形形状;
15.当所述十字螺母滑块(6a)沿所述十字导向槽(6b)向下运动时,驱动所述动力拉杆(10)带动所述平行四边形结构绕所述主连接臂安装孔(3-1)向外旋转,从而使所述旋翼折叠展开机构展开,使所述主连接臂(7)和所述副连接臂(8)形成水平状态,同时,当展开到位后,使各个分布式异形浮筒(2)为垂直向下状态;
16.在每个所述主连接臂(7)的外端部,位于对应的分布式异形浮筒(2)的正上方,设置所述旋翼机构;所述旋翼机构包括旋翼电机(11)和固定在所述旋翼电机(11)上面的旋翼桨(12),所述旋翼电机(11)驱动所述旋翼桨(12)旋转,从而产生升力;
17.所述机身(1)的下部,安装所述载荷投放系统。
18.优选的,所述十字导向槽(6b)为十字方形滑槽,其结构为:四个矩形柱各布置于正方形的四个角位置,四个矩形柱的顶部通过限位机构(6c)固定;通过限位机构(6c)的作用,使相邻两个矩形柱之间的间隙形成一个稳固的导向滑槽,由此形成具有四个导向滑槽的所述十字导向槽(6b);限位机构(6c)还具有对旋翼折叠展开单元折叠到位的限位作用;
19.所述十字螺母滑块(6a)包括四个呈十字形布置的滑块单元,每个所述滑块单元,与对应的一个所述导向滑槽相适配。
20.优选的,所述上封装体(3)、所述机身(1)和所述下封装体(13)均为圆筒形结构,且自上而下依次固定密封安装。
21.优选的,所述圆筒形结构的直径为d,所述主连接臂(7)的长度大于0.5d。
22.优选的,所述旋翼桨(12)为一对正反桨,且桨径大小相同。
23.优选的,所述分布式异形浮筒(2)使用eps材料,在保证轻量化的同时提供额外的浮力,在所述旋翼折叠展开机构完全折叠时,所述分布式异形浮筒(2)的外围直径小于直径d。
24.优选的,所述载荷投放系统包括下封装体(13)、探测任务载荷(14)和绳轮装置;
25.所述下封装体(13)固定安装于所述机身(1)的下方;所述下封装体(13)的内部安装所述探测任务载荷(14)和所述绳轮装置;
26.其中:所述绳轮装置包括载荷投放步进电机(15)、绕线轮(16)、导向轮(17)、瓷导
轮(18)和线缆(19);
27.所述下封装体(13)具有相互隔离密封的上部腔体平台和下部腔体平台;所述载荷投放步进电机(15)固定于所述下封装体(13)的上部腔体平台,所述载荷投放步进电机(15)的动力输出轴垂直穿过所述下封装体(13)的上部腔体平台并与所述绕线轮(16)的上端固定连接,所述导向轮(17)和所述瓷导轮(18)均固定安装于所述下封装体(13)的下部腔体平台,所述线缆(19)的一端绕在所述绕线轮(16)上,所述线缆(19)的另一端通过所述导向轮(17)和所述瓷导轮(18)后,系在所述探测任务载荷(14)的上端;
28.当所述载荷投放步进电机(15)工作时,驱动所述绕线轮(16)顺时针方向旋转,从而使所述线缆(19)的一端不断缠绕于所述绕线轮(16),进而提升所述探测任务载荷(14);当所述载荷投放步进电机(15)驱动所述绕线轮(16)逆时针方向旋转,从而不断释放所述线缆(19),进而释放所述探测任务载荷(14)。
29.优选的,所述载荷投放系统还包括载荷保险装置;
30.所述载荷保险装置包括上保持架(20)、下保持架(21)、舵机(22)和曲柄(23);
31.所述上保持架(20)和所述下保持架(21)固定安装于所述下封装体(13)的腔体内部,并且,所述上保持架(20)和所述下保持架(21)均设有探测任务载荷限位孔,所述上保持架(20)和所述下保持架(21)通过各自的探测任务载荷限位孔,套于所述探测任务载荷(14)的外面,以限制所述探测任务载荷(14)在所述下封装体(13)的腔体内的晃动;
32.所述下保持架(21)的下方设置所述曲柄(23),所述曲柄(23)与所述舵机(22)的输出轴连接,所述舵机(22)和所述曲柄(23)形成开关结构,当所述探测任务载荷(14)需要投放时,所述舵机(22)驱动所述曲柄(23)转动打开,使得所述探测任务载荷(14)自由落下;当所述探测任务载荷(14)完成提升到位时,所述舵机(22)驱动所述曲柄(23)转动关闭,使所述曲柄(23)支撑所述探测任务载荷(14),避免所述探测任务载荷(14)脱落,从而对所述探测任务载荷(14)起到保险作用。
33.本实用新型提供的适用于多平台投放的可变体海空两栖探测系统具有以下优点:
34.本实用新型提供一种适用于多平台投放的可变体海空两栖探测系统,该系统可在水面长期栖息,通过载荷投放系统进行水下目标的侦测,并具有一定的短途快速迁徙能力,能够保证短时间对于水下移动目标的持续追踪,此外,系统可基于任务工况进行自主变体,具有便于携带,机动灵活,使用方便,安全高效,海空两栖,环境适应性强等特点。
附图说明
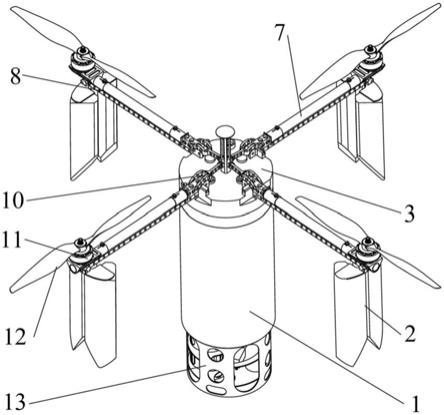
35.图1是本实用新型完全展开状态下的结构示意图;
36.图2是本实用新型完全折叠状态下的结构示意图;
37.图3是旋翼折叠展开机构的结构示意图;
38.图4是上封装体和十字导向槽的结构示意图;
39.图5是载荷投放系统在探测任务载荷回收状态的结构示意图;
40.图6是载荷投放系统的绳轮装置的结构示意图;
41.图7是载荷投放系统的载荷保险装置的结构示意图;
42.图8是载荷投放系统的探测任务载荷进行水下侦测的状态示意图;
43.图9是本实用新型水面栖停、水上展开和水上起飞的状态变化示意图;
44.图10是本实用新型工作的流程图。
45.其中:
46.1.机身;2.分布式异形浮筒;3.上封装体;3-1.主连接臂安装孔;3-2.副连接臂安装孔;4.收放步进电机;5.丝杠;6a.十字螺母滑块;6b.十字导向槽;6c.限位机构;7.主连接臂;7-1.动力拉杆铰接孔;8.副连接臂;9.浮筒拉杆;10.动力拉杆;11.旋翼电机;12.旋翼桨;13.下封装体;14.探测任务载荷;15.载荷投放步进电机;16.绕线轮;17.导向轮;18.瓷导轮;19.线缆;20.上保持架;21.下保持架;22.舵机;23.曲柄。
具体实施方式
47.为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
48.本实用新型提供一种适用于多平台投放的可变体海空两栖探测系统,该系统可在水面长期栖息,通过载荷投放系统进行水下目标的侦测,并具有一定的短途快速迁徙能力,能够保证短时间对于水下移动目标的持续追踪,此外,系统可基于任务工况进行自主变体,具有便于携带,机动灵活,使用方便,安全高效,海空两栖,环境适应性强等特点。
49.本实用新型提供一种适用于多平台投放的可变体海空两栖探测系统,具有完全折叠状态和完全展开状态,如图1所示,为完全展开状态图;如图2所示,为完全折叠状态图,包括:控制系统、机身1、旋翼系统、分布式异形浮筒2和载荷投放系统。
50.下面对旋翼系统、分布式异形浮筒和载荷投放系统分别详细介绍:
51.(一)旋翼系统
52.旋翼系统包括旋翼收放动力装置、旋翼折叠展开机构和旋翼机构。
53.(1.1)旋翼收放动力装置
54.参考图3和图4,旋翼收放动力装置包括:上封装体3、收放步进电机4、丝杠5、十字螺母滑块6a和十字导向槽6b;
55.上封装体3固定安装于机身1的上方;上封装体3的顶部圆心轴线方向固定安装垂直设置的十字导向槽6b,十字导向槽6b的内部同轴安装丝杠5,丝杠5的外部螺纹旋合安装十字螺母滑块6a,以使丝杠5和十字螺母滑块6a形成丝杠螺母结构,当丝杠5旋转时,带动十字螺母滑块6a沿十字导向槽6b进行升降运动;上封装体3的内部固定安装收放步进电机4,收放步进电机4可采用型号为42bygh40s的步进电机,并且,收放步进电机4的动力输出轴垂直穿过上封装体3的顶部圆心而与丝杠5的底部固定,用于驱动丝杠5旋转;其中,十字螺母滑块6a具有四个呈十字形对称的螺母滑块铰接部;
56.作为一种具体实现方式,十字导向槽6b为十字方形滑槽,其结构为:四个矩形柱各布置于正方形的四个角位置,四个矩形柱的顶部通过限位机构6c固定;通过限位机构6c的作用,使相邻两个矩形柱之间的间隙形成一个稳固的导向滑槽,由此形成具有四个导向滑槽的十字导向槽6b;限位机构6c还具有对旋翼折叠展开单元折叠到位的限位作用;
57.十字螺母滑块6a包括四个呈十字形布置的滑块单元,每个滑块单元,与对应的一个导向滑槽相适配。
58.(1.2)旋翼折叠展开机构
59.旋翼折叠展开机构包括四个呈十字形对称分布的旋翼折叠展开单元;各个旋翼折叠展开单元沿上封装体3的顶部周向平均分布,并且,各个旋翼折叠展开单元的结构相同,均包括:主连接臂7、副连接臂8、浮筒拉杆9和动力拉杆10;
60.在与对应的一个螺母滑块铰接部径向延长线平行的方向,在上封装体3的顶部边缘位置固定安装主连接臂安装孔3-1,在主连接臂安装孔3-1的外部且低于主连接臂安装孔3-1的位置,固定安装副连接臂安装孔3-2;
61.主连接臂7的内端通过主连接臂安装孔3-1与上封装体3铰接,主连接臂7的外端与浮筒拉杆9的上端铰接,副连接臂8位于主连接臂7的下方,并且与主连接臂7平行,副连接臂8的内端通过副连接臂安装孔3-2与上封装体3铰接,副连接臂8的外端与浮筒拉杆9的下端铰接,从而形成平行四边形结构;
62.浮筒拉杆9的下端固定安装分布式异形浮筒2;其中,分布式异形浮筒2使用eps材料,在保证轻量化的同时提供额外的浮力,在旋翼折叠展开机构完全折叠时,分布式异形浮筒2的外围直径小于直径d。
63.在主连接臂7的中部设有动力拉杆铰接孔7-1,动力拉杆10的上端与十字螺母滑块6a的一个螺母滑块铰接部铰接,动力拉杆10的下端通过动力拉杆铰接孔7-1与主连接臂7铰接;
64.当十字螺母滑块6a沿十字导向槽6b向上运动时,驱动动力拉杆10带动平行四边形结构绕主连接臂安装孔3-1向内旋转,从而使旋翼折叠展开机构实现折叠,使主连接臂7和副连接臂8形成竖直状态;同时,当折叠到位后,各个分布式异形浮筒2围在主连接臂7和副连接臂8的外部,并拼接形成筒形形状;
65.当十字螺母滑块6a沿十字导向槽6b向下运动时,驱动动力拉杆10带动平行四边形结构绕主连接臂安装孔3-1向外旋转,从而使旋翼折叠展开机构展开,使主连接臂7和副连接臂8形成水平状态,同时,当展开到位后,使各个分布式异形浮筒2为垂直向下状态。
66.(1.3)旋翼机构
67.在每个主连接臂7的外端部,位于对应的分布式异形浮筒2的正上方,设置旋翼机构;旋翼机构包括旋翼电机11和固定在旋翼电机11上面的旋翼桨12,旋翼电机11驱动旋翼桨12旋转,从而产生升力;作为一种具体实现方式,旋翼桨12为一对正反桨,且桨径大小相同。
68.因此,本实用新型中,共设置四个旋翼,四个旋翼沿上封装体3的周向平均分布;在机臂折叠展开机构完全展开时,四个旋翼呈十字水平形态,当四个旋翼工作时,旋翼电机11驱动旋翼桨12旋转,从而产生升力。
69.(二)分布式异形浮筒
70.分布式异形浮筒属于本实用新型独创设计,一共设置4个分布式异形浮筒;每个分布式异形浮筒的形状相同,均包括左右对称的左侧异形浮筒和右侧异形浮筒,左侧异形浮筒和右侧异形浮筒的表面为弧形曲面。
71.在完全折叠状态时,四个分布式异形浮筒被同步带动收回,一方面,将旋翼折叠展开机构包围在分布式异形浮筒围成的内部空间中;另一方面,四个分布式异形浮筒正好围成筒形形状,并且,筒形形状的直径,小于机身主体直径。
72.在完全展开状态时,四个分布式异形浮筒各位于一个主连接臂的末端,并且,分布
式异形浮筒为垂直向下结构。
73.采用以上设计方式的优点为:
74.1、在完全折叠状态时,主要用于探测系统的投放过程,因此,由于四个分布式异形浮筒围成筒形形状,并且,小于机身主体直径,因此,不会增加投放过程的阻力,保证探测系统精准投放。
75.2、在完全展开状态时,分布式异形浮筒在四角呈垂直向下结构,通过分布式异形浮筒提供的浮力,可实现对探测系统整体稳定支撑作用。
76.3、异形浮筒下端采用楔形形式,一方面能够保证探测系统入水初始阶段受到的阻力更小,同时楔形形式可以保证探测系统在入水时,浮筒提供的浮力呈近似线性增长趋势,避免了由于四周浮力突变进而给探测系统入水时的稳定性带来的不利影响。同样,对于探测系统出水阶段,能够一定程度上降低浮筒出水瞬间的浮力突变,降低控制系统所需补偿不确定变量的幅值,减轻控制系统负担,保证系统良好响应。
77.(三)载荷投放系统
78.机身1的下部,安装载荷投放系统。参考图5、图6和图8,载荷投放系统包括下封装体13、探测任务载荷14和绳轮装置;
79.下封装体13固定安装于机身1的下方;下封装体13的内部安装探测任务载荷14和绳轮装置;
80.探测任务载荷14核心传感器采用低噪声矢量传感器,低噪声矢量传感器内嵌一个地磁传感器,可以实时监控矢量传感器本身随水流而产生的航向角变化。
81.其中:绳轮装置包括载荷投放步进电机15、绕线轮16、导向轮17、瓷导轮18和线缆19;
82.下封装体13具有相互隔离密封的上部腔体平台和下部腔体平台;载荷投放步进电机15固定于下封装体13的上部腔体平台,载荷投放步进电机15可采用型号:spt5535lv-360的电机,载荷投放步进电机15的动力输出轴垂直穿过下封装体13的上部腔体平台并与绕线轮16的上端固定连接,导向轮17和瓷导轮18均固定安装于下封装体13的下部腔体平台,线缆19的一端绕在绕线轮16上,线缆19的另一端通过导向轮17和瓷导轮18后,系在探测任务载荷14的上端;
83.当载荷投放步进电机15工作时,驱动绕线轮16顺时针方向旋转,从而使线缆19的一端不断缠绕于绕线轮16,进而提升探测任务载荷14;当载荷投放步进电机15驱动绕线轮16逆时针方向旋转,从而不断释放线缆19,进而释放探测任务载荷14。
84.载荷投放系统还包括载荷保险装置;
85.参考图7,载荷保险装置包括上保持架20、下保持架21、舵机22和曲柄23;
86.上保持架20和下保持架21固定安装于下封装体13的腔体内部,并且,上保持架20和下保持架21均设有探测任务载荷限位孔,上保持架20和下保持架21通过各自的探测任务载荷限位孔,套于探测任务载荷14的外面,以限制探测任务载荷14在下封装体13的腔体内的晃动;
87.下保持架21的下方设置曲柄23,曲柄23与舵机22的输出轴连接,舵机22可采用型号omg-r4pro-40bf的舵机,舵机22和曲柄23形成开关结构,当探测任务载荷14需要投放时,舵机22驱动曲柄23转动打开,使得探测任务载荷14自由落下;当探测任务载荷14完成提升
到位时,舵机22驱动曲柄23转动关闭,使曲柄23支撑探测任务载荷14,避免探测任务载荷14脱落,从而对探测任务载荷14起到保险作用。
88.本实用新型中,上封装体3、机身1和下封装体13均为圆筒形结构,且自上而下依次固定密封安装。圆筒形结构的直径为d,主连接臂7的长度大于0.5d。
89.本实用新型还提供一种适用于多平台投放的可变体海空两栖探测系统的方法,参考图9和图10,包括以下步骤:
90.步骤1,可变体海空两栖探测系统在运输过程呈初始状态,为完全折叠状态的圆筒形;
91.其中,完全折叠状态的圆筒形是指:旋翼折叠展开机构为完全折叠状态,此时,各个分布式异形浮筒2将旋翼折叠展开机构完全包围在内部,各个分布式异形浮筒2拼合在一起,形成筒状,并同轴位于机身1的正上方,并且,分布式异形浮筒2拼合形成的筒状直径,小于机身1直径;因此,可变体海空两栖探测系统整体呈圆筒形;
92.步骤2,当将可变体海空两栖探测系统运输到指定地点后,将可变体海空两栖探测系统投放;其中,在可变体海空两栖探测系统下落投放的过程中,可变体海空两栖探测系统维持完全折叠状态;
93.步骤3,当可变体海空两栖探测系统投落到水面时,呈漂浮状态;其中,漂浮状态是指:可变体海空两栖探测系统的轴线与水面平行,或者,可变体海空两栖探测系统与水面呈一定角度的倾斜状态;
94.步骤4,当控制系统检测到可变体海空两栖探测系统已属于水面漂浮状态时,向收放步进电机4发送展开指令,令收放步进电机4进行特定步数的转动,从而使旋翼折叠展开机构完全展开,同时,分布式异形浮筒2呈垂直状态,通过分布式异形浮筒2在四角的支撑作用,以及机身1在中心点的支撑作用,使可变体海空两栖探测系统浮在水面上,至此,可变体海空两栖探测系统完成从完全折叠状态到展开状态的变体;
95.步骤5,可变体海空两栖探测系统在水面稳定漂浮后,控制系统发出指令,启动载荷投放系统,使载荷投放步进电机15驱动探测任务载荷14到达预定深度后,进行探测数据的采集,并将采集到的探测数据实时回传;
96.步骤6,在完成特定探测任务后,控制系统发出指令,使载荷投放步进电机15驱动探测任务载荷14回收复位;
97.步骤7,然后,控制系统启动旋翼电机11,旋翼电机11带动旋翼桨12旋转,从而产生升力,使可变体海空两栖探测系统起飞返回基地,或向新的地点飞行,重复下落、探测、起飞的过程。
98.本实用新型提供一种适用于多平台投放的可变体海空两栖探测系统及方法,具有以下优点:
99.(1)本实用新型通过特殊的分布式异形浮筒设计,使得探测系统可在水面长期栖停,通过探测任务载荷的投放与回收实现水下目标的侦测,同时基于平行四边形机构原理设计独特的旋翼收放机构,采用收放步进电机驱动实现旋翼系统的展开与折叠,使其便于通过岸基、海上和空中等平台进行发射和部署,极大的增强了探测系统的环境适应性,拓展了探测系统的适用范围。
100.(2)具有便于携带,机动灵活,使用方便,安全高效,海空两栖,环境适应性强等特
点。
101.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
