1.本发明涉及火力发电厂在役检查及维修的技术领域,特别涉及一种水冷壁爬壁机器人控制系统。
背景技术:
2.壁机器人作为一种特种机器人开始在各行各业大放异彩。国内,哈尔滨工业大学机器人研究所是最早研究爬壁机器人的科研机构,代表性产品有多功能履带式罐壁喷涂检测磁吸附爬壁机器人,美国、加拿大、印度等国则已经开发了专门应用于火电站锅炉清洗、检查的人工智能机器人并投入应用,但大多数都沿着管线行走无法跨越水冷壁管,检测效率较低。
3.水冷壁爬壁机器人是用于火电站锅炉在役检查和维修工作的特种机器人,大部分依靠永磁装置吸附在水冷壁上作业,吸附装置承载力较大的机器人可以搭载更多设备,但灵活性很低,难以控制,吸附力较小的机器人能够在壁面灵活爬行但负载能力不足功能十分单一。
技术实现要素:
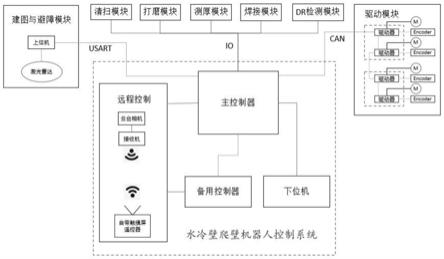
4.针对现有技术中存在的不足之处,本发明的目的是提供一种水冷壁爬壁机器人控制系统,实时控制机器人在壁面爬行以及滚刷清扫、壁面打磨、壁面喷涂、水冷壁管测厚等功能,实时查看视频以观测炉内情况,使炉膛检修工作更加简便安全智能化且可回溯查看。为了实现根据本发明的上述目的和其他优点,提供了一种水冷壁爬壁机器人控制系统,包括:控制模块、与所述控制模块信号连接的建图与避障模块与驱动模块及与所述控制模块信号连接的功能模块;
5.所述控制模块包括主控制模块、与所述主控制模块信号连接的远程控制模块与下位机及与所述远程控制模块信号连接的备用控制器,所述备用控制器与主控制模块信号连接;
6.所述功能模块包括清扫模块、打磨模块、测厚模块、焊接模块及or检测模块;
7.所述远程控制模块包括云台相机、与所述云台相机信号连接的接收机及自带触摸屏的遥控器。
8.优选的,所述主控制模块、云台相机及接收机均安装于机器人上,所述功能模块可拆卸安装于机器人上。
9.优选的,所述远程控制模块通过遥控器发出针对功能模块的指令,且远程控制模块通过接收机接收信息转发至主控制模块。
10.优选的,所述主控制模块用于解析接收机发送的数据,主控制模块依据不同指令对相应的功能模块发出信号。
11.优选的,反馈数据经由主控制模块网络通信回传至下位机,下位机若判断主控制器宕机则立即启动备用控制器令爬壁机器人返回地面进行问题排查。
12.优选的,所述接收机安装于爬壁机器人上接收通道值并通过sbus通信与主控制模块连接,同时接收机连接云台相机,将视频流远程传输到遥控器上进行显示,通过遥控器触摸屏调整镜头进行拍摄录像,所述云台相机用于保存图片和视频文件。
13.优选的,所述主控制模块安装有can通信参数、串口通信参数、io口参数、网络通信参数、sbus通信参数,所述驱动模块通过can总线连接主控制模块,所述建图与避障模块通过串口连接主控制模块,所述功能模块通过io口连接主控制模块,且所述主控制模块取接收机转发的信息进行解析,根据通道值判断当前动作的功能模块,发出控制指令。
14.本发明与现有技术相比,其有益效果是:
15.(1)控制系统实现了通过手持式遥控器实时控制机器人在壁面爬行以及滚刷清扫、壁面打磨、壁面喷涂、水冷壁管测厚等功能,并在遥控器的触摸屏上实时查看视频以观测炉内情况,调整镜头进行全方位观测,炉内数据通过网线传输到下位机进行保存和分析,使炉膛检修工作更加简便安全智能化且可回溯查看。
16.(2)操作简便,各功能控制方式集成化统一化,控制系统具有很好的鲁棒性,设计了备用控制功能,进一步提升系统鲁棒性,使控制系统更加安全可靠,解决主控制器宕机无法回收机器人问题。
17.(3)实现了炉膛信息回传,通过实时数据分析使机器人具备自主避险能力,降低事故风险,信息保存和回溯功能则为后续分析提供数据支持。
18.(4)设计了目前不常见的测厚模块、焊接模块和dr检测模块,且各个功能模块均可拆卸替换,接口统一,控制系统耦合性低,各个功能模块互不影响
附图说明
19.图1为根据本发明的水冷壁爬壁机器人控制系统的三结构框图;
20.图2为根据本发明的水冷壁爬壁机器人控制系统的方案流程图;
21.图3为根据本发明的水冷壁爬壁机器人控制系统的下位机软件流程图;
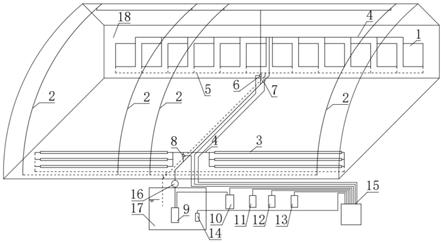
22.图4为根据本发明的水冷壁爬壁机器人控制系统的打磨模块的结构图;
23.图5为根据本发明的水冷壁爬壁机器人控制系统的测厚模块的结构图;
24.图6为根据本发明的水冷壁爬壁机器人控制系统的dr检测模块的结构图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.参照图1-6,一种水冷壁爬壁机器人控制系统,包括:控制模块、与所述控制模块信号连接的建图与避障模块与驱动模块及与所述控制模块信号连接的功能模块;所述控制模块包括主控制模块、与所述主控制模块信号连接的远程控制模块与下位机及与所述远程控制模块信号连接的备用控制器,所述备用控制器与主控制模块信号连接;所述功能模块包括清扫模块、打磨模块、测厚模块、焊接模块及or检测模块;所述远程控制模块包括云台相机、与所述云台相机信号连接的接收机及自带触摸屏的遥控器。
27.其中驱动模块包括四组磁性轮、直流电机和驱动器,通过can总线将四个驱动器与主控制器连接,使用的控制指令为can数据帧,机器人状态包括静止、上行、后退、左转和右转五种,在静止命令下四组磁性轮均不转动,遥控器推杆具备自动回中特性,设置推杆回中为静止状态。推杆有左右两个,根据习惯设置做推杆负责控制前后,右推杆负责控制左右,前进/后退根据左手推杆通道值计算所需速度然后保持四轮速度一致,推杆对应通道值数据变换范围是[282,1722],电机最大转速1800rpm,前进/后退速度不宜过快,经实验将速度限制在[-1080,1080]即可,由此设计左推杆通道值c与转速v的映射关系为:
[0028][0029]
左转右转利用差分速度的方法来实现,右手推杆通道值设为w,变换范围与c一致,由于本发明使用的机器人体型较大,同侧轮速度保持一致有利于机器人爬行,左侧速度设为leftv,右侧速度设为rightv,计算速度如式2。
[0030][0031]
转弯时最大转速为1080 (1722-1002)=1800rpm,即电机最大转速。
[0032]
进一步的,所述主控制模块、云台相机及接收机均安装于机器人上,所述功能模块可拆卸安装于机器人上,方便对不对功能需求时对不同的功能模块进行更换,方便快捷,而且在维修时也方便更换,不耽误时间。
[0033]
进一步的,所述远程控制模块通过遥控器发出针对功能模块的指令,且远程控制模块通过接收机接收信息转发至主控制模块。
[0034]
进一步的,所述主控制模块用于解析接收机发送的数据,主控制模块依据不同指令对相应的功能模块发出信号。
[0035]
进一步的,反馈数据经由主控制模块网络通信回传至下位机,下位机若判断主控制器宕机则立即启动备用控制器令爬壁机器人返回地面进行问题排查。
[0036]
进一步的,所述接收机安装于爬壁机器人上接收通道值并通过sbus通信与主控制模块连接,同时接收机连接云台相机,将视频流远程传输到遥控器上进行显示,通过遥控器触摸屏调整镜头进行拍摄录像,所述云台相机用于保存图片和视频文件。
[0037]
进一步的,所述主控制模块安装有can通信参数、串口通信参数、io口参数、网络通信参数、sbus通信参数,所述驱动模块通过can总线连接主控制模块,所述建图与避障模块通过串口连接主控制模块,所述功能模块通过io口连接主控制模块,且所述主控制模块取接收机转发的信息进行解析,根据通道值判断当前动作的功能模块,发出控制指令。
[0038]
所述清扫模块在驱动模块上安装有推拉杆1及设置于所述推拉杆1一侧的滚刷2,通过主控模块的io口控制滚刷2的供电开关,所述推拉杆1通过直流电机进行驱动,且推拉杆1将滚刷2放置于合适的位置,滚刷2进行清扫的功能,推拉杆1通过改变直流电机输入方向来控制推拉杆1进行拉伸的动作。
[0039]
所述打磨模块通过在驱动模块上安装有机械臂3以及安装于所述机械臂3上的打磨头,主控模块通过io口控制打磨模块的启停,而且调整机械臂3的位置即可调整打磨的位
置。
[0040]
所述测厚模块通过在机械臂3上安装超声波测厚探头4,且位于超声波测厚探头4上部设置有探测摄像头,通过调整机械臂3的位置对超声波测厚探头4的位置进行调整,而且机械臂3末端暗转有旋转夹具,所述超声波测厚探头4固定于所述旋转夹具上,超声波测厚需要在探头和壁面之间喷涂一层耦合剂,喷涂借助步进电机实现,通过主控模块io口连接步进电机驱动器的脉冲输入和方向输入端进行控制,测厚结果经过网络传输到下位机进行保存和分析。
[0041]
所述焊接模块通过在驱动模块上安装有机械臂3,在所述机械臂3上安装焊枪与送丝设备,通过主控模块的io口对送丝设备进行控制。
[0042]
所述dr检测模块通过在驱动模块上安装有dr检测设备5、支架和对焦调解装置6及激光雷达,所述dr检测设备5通过工业x射线机和平板探测器组成,其中x射线机安装在爬壁机器人上,成像平板置于炉膛外,通过支架和对焦调解装置6来调整dr检测设备5的聚焦,所述支架和对焦调解装置6包括丝杠,所述丝杆连接有步进电机,而且所述丝杆上安装有位置传感器,所述位置传感器用于工业x射线机超出范围移动。主控模块通过io与步进电机驱动器连接来对支架和对焦调解装置6升降进行控制,位置传感器使用的是npn型,需要经过单路继电器转为高低电平输入主控制器io口进行位置判断。
[0043]
所述建图与避障模块通过dr检测模块中的激光雷达获取炉膛内点云信息,经过上位机处理数据,通过串口与主控制器通信,若判断有障碍则主控制器做出停止命令并告知下位机,建图数据保存于上位机硬盘,后续可进行场景复现和分析。
[0044]
所述下位机与主控制器通过网线连接,主要负责数据接收和保存,同时用户可实时查看数据做出判断,为了降低功能模块的耦合性,下位机将测厚数据和机器人运行数据划分为两个软件分别进行保存和分析,且所述下位机首先创建客户端socket,然后与数据源socket建立连接,进行选择数据保存路径,接着进行判断监听连接是否有数据,当判断没有数据时进行判断监听连接是否有数据,当判断有数据时进行接收数据并保存,最后进行判断是否连接关闭,当判断关闭时下位机结束工作,当判断不关闭时继续进行判断监听连接是否有数据环节。
[0045]
所述备用控制器用于当机器人在爬行作业过程中出现问题,例如由于震动等原因导致失控,通过启用备用控制器来唤醒驱动器重新工作,设计思路是在地面放置一份备用控制器和备用遥控器,备用控制器接入can总线,网线为八根四对双绞线,实际网络通信只需要4根线即可,因此取其中一对双绞线作为can线,从而实现备用控制器与驱动器can通信。备用控制器只保留驱动功能,目的是尽快令爬壁机器人回到地面进行检查。
[0046]
这里说明的设备数量和处理规模是用来简化本发明的说明的,对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
[0047]
尽管本发明的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。