1.本发明是一种纯机械式行星轮系自动限滑差速器,使得车辆不但具有在良好路面正常差速行驶的能力,而且还具有在全地形、泥泞湿滑、冰雪路面等极端恶劣的全天候工况下,机械自动控制限滑、驱动扭力全时达到最大值且正常差速行驶的能力,它适用于所有需要差速传动的车辆。
背景技术:
2.普通汽车对称式圆锥行星齿轮差速器由行星齿轮、行星架、差速器壳、半轴齿轮等零件组成;发动机的动力经传动轴输入差速器,直接驱动行星架,再由行星轮带动左、右两半轴齿轮,分别驱动左、右车轮;差速器的设计要求满足:(左半轴转速n1) (右半轴转速n2)=(两倍行星架转速2n0);当汽车直行时,左、右车轮和行星架三者的转速相等处于平衡状态,这时驱动力达到最大值。而在汽车转弯时,内侧车轮转速降低,外侧车轮转速增加,正常差速行驶;但是当汽车行驶在泥泞、冰雪路面上时,两侧车轮转速变化可能会超过正常差速的范围,或者更为极端的情况出现,即当一侧驱动轮打滑空转时,另一驱动轮的转速为零,驱动力为零,车辆停止前进,故它必须在良好的环境条件下工作才能保持最大工作效率和行驶通过性能。
3.目前已出现的自锁式差速器虽都有较好的自动防滑能力,但无论是机械式还是电子式差速防滑技术,一般均采用高摩擦扭矩控制方式,存在摩擦发热效应,扭矩控制力有限,对于全地形工作,全天候的使用环境适应性差,更不能应用于大扭矩车辆,大部分仅限于小型车辆。其次对于电子控制的防滑差速系统来说,均存在高寒、高热、高盐湿、电磁干扰等较为恶劣环境的适应性差和可靠性差,以及成本居高不下的缺点。
技术实现要素:
4.为了解决上述现有技术存在的问题,本发明提出一种行星轮系自动限滑差速器,采用纯机械式结构,具有全时自动控制左右车轮最大转速差、防止车轮打滑的功能,使得左右驱动轮均能在全地形、全天候工况下驱动扭力达到最大值,同时确保正常差速转向功能,即使在松软的泥土或沙地、泥泞、冰雪路面上行驶,甚至在行驶中车轮单侧悬空无附着力时,依然能自动平稳地保证车辆及时脱离打滑状态,无需任何人工干预,正常行驶通过。
5.为达到目的,本发明采用如下技术方案:一种行星轮系自动限滑差速器,其特征在于:由主差速器、行星轮系差速控制器、左驱动半轴、右驱动半轴、离合器五部分组成;所述主差速器由差速器壳体、销轴、行星齿轮、左半轴齿轮、右半轴齿轮组成;差速器壳体与主减速器被动轮通过螺栓连接;行星轮系差速控制器由第一行星轮系差速控制器单元和第二行星轮系差速控制器单元组成,第一行星轮系差速控制器单元由第一行星轮系和与之相连接的第一超越离合器构成,第二行星轮系差速控制器单元由第二行星轮系和与之相连接的第二超越离合器构成,行星轮系差速控制器布置在主差速器右侧的右驱动半轴上,离合器由左离合器和右离
合器两部分组成,左离合器和右离合器通过牙嵌联结在一起或者脱开,第一超越离合器的内圈及第二超越离合器的内圈均与左离合器通过花键连接为一体,右离合器与右驱动半轴通过花键连接在一起;通过上述机构保证,第一行星轮系差速控制器单元控制右车轮的转速不低于设定的最小转速n
min
,第二行星轮系差速控制器单元控制右车轮的转速不高于设定的最大转速n
max
。
6.进一步地,第一行星轮系包括第一支架、第一大太阳轮、第一行星齿轮、第一小太阳轮、第一行星架,第二行星轮系包括第二支架、第二大太阳轮、第二行星齿轮、第二小太阳轮、第二行星架。
7.进一步地,第一行星轮系的第一大太阳轮通过螺栓与第一支架连接在一起,第一支架通过螺栓与差速器壳体连接,第一小太阳轮通过螺栓固定在桥壳体上,第一行星轮系的第一行星架与第二行星轮系的第二行星架通过花键空心轴连接为一体,第二行星架与第一超越离合器的外圈通过螺栓连接为一体,转速为n
min
,第一超越离合器的内圈和左离合器通过花键连接在一起,右离合器和右驱动半轴通过花键连接在一起,车辆前进时,离合器处于常连接状态,第一超越离合器的内圈的转速和右半轴及车轮的转速均为 n2,当转速n2大于第一超越离合器的外圈的转速n
min
时,第一超越离合器处于超越状态,互不影响;而当转速n2小于或等于外圈的转速n
min
时,第一超越离合器处于契合状态,第一超越离合器的内、外圈一起旋转,转速均为n
min
,从而达到了限制转速n2不能低于转速n
min
的目的。
8.进一步地,第二行星轮系的第二小太阳轮通过螺栓固定在桥壳体上,第二行星轮系的第二行星架与第一行星轮系的第一行星架连接为一体,第二大太阳轮与第二支架通过螺栓联结在一起,第二支架与第二超越离合器的外圈通过螺栓连接为一体,转速为 n
max
,第二超越离合器的内圈和左离合器通过花键连接在一起,车辆前进时,离合器处于常连接状态,第二超越离合器的内圈的转速和右驱动半轴及车轮的转速均为n2,当转速n2小于第一超越离合器的外圈的转速n
max
时,第二离合器处于超越状态,互不影响;而当转速n2大于或等于外圈的转速n
max
时,第二超越离合器处于契合状态,内外圈一起旋转,转速均为n
max
,从而达到了限制转速n2不能大于转速n
max
的目的。
9.本发明中,第一超越离合器和第二超越离合器在正常差速的情况下,均处于超越状态,非正常差速状态即车轮打滑时,仅有一个超越离合器处于契合状态,另一个处于超越状态,互不干扰;这样通过2个行星轮系差速控制器单元,使得左右车轮的转速被限定在设计允许的差速范围n
min-n
max
之间,从而使得差速器既可以满足转弯时最大差速要求,又可以达到车辆打滑时自动限滑的目的。
10.本发明中,当车辆倒车时,离合器分离,行星轮系差速控制器不起作用。
11.本发明的有益效果是:本发明中的主差速器与现有的圆锥齿轮差速器相同,关键核心技术是增设了一套行星轮系差速控制器,该控制机构在保证正常差速转向功能的情况下,具有全时自动控制左右车轮最大转速差的功能,使得左右驱动轮均能在全地形、全天候工况下驱动扭力达到最大值,即使在松软的泥土或沙地、泥泞湿滑的冰雪路面上行驶、甚至行驶中车轮单侧悬空无附着力时,依然能自动平稳地保证车辆无打滑正常高效行驶通过。该控制机构既可以用于驱动桥差速器,又可以用于转向桥差速器以及中间差速器,通过纯机械式结构实现车辆的全时全驱功能,具有高通过性、大扭矩、高可靠、低成本等特点;该系统与车辆其他安全控制系统abs、tcs、scs等完全相容,相互独立,互不影响,市场应用前景
广阔。
附图说明
12.图1是本发明一种行星轮系自动限滑差速器的结构示意图。
13.图2是本发明一种行星轮系自动限滑差速器的工作原理图。
14.图3是本发明一种行星轮系自动限滑差速器控制左、右车轮转速变化曲线图。
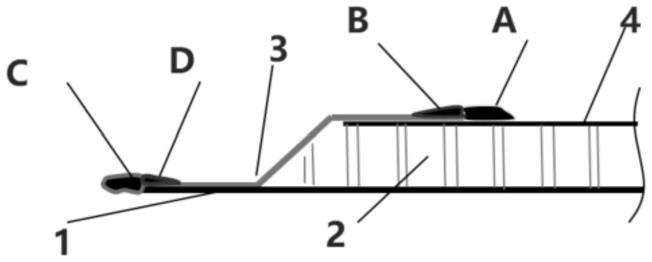
15.图4是本发明一种行星轮系自动限滑差速器的结构简图(实体模型)。
16.图5是本发明中行星轮系小太阳轮固定的结构简图(实体模型)。
17.图6是本发明中第一行星轮系的结构图(实体模型)。
18.图7是本发明中第二行星轮系的结构图(实体模型)。
19.图8是本发明中第一支架的结构图(实体模型)。
20.图9是本发明中第二支架的结构图(实体模型)。
21.图10是本发明中离合器的结构图(实体模型)。
22.图11是本发明中第一支架的主视图。
23.图12是图11中沿a-a剖视图。
24.图13是本发明中第一大太阳轮的主视图。
25.图14是图13中沿a-a剖视图。
26.图15是本发明中第一行星齿轮的主视图。
27.图16是图15中沿a-a剖视图。
28.图17是本发明中第一小太阳轮的主视图。
29.图18是图17中沿a-a剖视图。
30.图19是本发明中第一行星架的主视图。
31.图20是图19中沿a-a剖视图。
32.图21是本发明中空心芯轴的结构图。
33.图22是本发明中第二大太阳轮的主视图。
34.图23是图22中沿a-a剖视图。
35.图24是本发明中第二行星齿轮的主视图。
36.图25是图24中沿a-a剖视图。
37.图26是本发明中第二小太阳轮的主视图。
38.图27是图26中沿a-a剖视图。
39.图28是本发明中第二行星架的主视图。
40.图29是图28中沿a-a剖视图。
41.图30是本发明中第二支架的主视图。
42.图31是图30中沿a-a剖视图。
43.图32是本发明中第一超越离合器的主视图。
44.图33是本发明中第一超越离合器的左视图(剖视图)。
45.图34是本发明中第二超越离合器的主视图。
46.图35是本发明中第二超越离合器的左视图(剖视图)。
47.图36是本发明中(离合器的)左离合器的结构图。
48.图37是本发明中(离合器的)右离合器的结构图。
具体实施方式
49.下面结合附图对本发明的实施方式做进一步的说明。
50.结合图1-图37所示,其中,图4至图10是本发明涉及的主要零部件实体模型参考图,本发明的一种行星轮系自动限滑差速器,由主差速器1、行星轮系差速控制器 2、左驱动半轴3、右驱动半轴4、离合器5五部分组成,它适用于所有装备差速器的各种大小轮式车辆;所述主差速器1与现有技术中的对称式圆锥齿轮差速器原理相同,在结构上有所差别,主要由与主被动圆锥齿轮相连接的差速器壳体1-1、销轴1-2、行星齿轮1-3、左半轴齿轮1-4、右半轴齿轮1-5等零件组成。差速器壳体1-1、销轴1-2通过螺栓连接在一起,行星齿轮1-3安装在销轴1-2上,行星齿轮1-3与左半轴齿轮1-4和右半轴齿轮1-5对称常啮合,左半轴齿轮1-4和右半轴齿轮1-5在内孔设有内花键,分别与左驱动半轴3 和右驱动半轴4的外花键相连;所述行星轮系差速控制器2布置在主差速器右侧,右驱动半轴上,它们是由2个行星轮系差速控制单元组成,定义为第一行星轮系差速控制器单元、第二行星轮系差速控制器单元;第一行星轮系差速控制器单元由第一行星轮系和与之相连接的第一超越离合器构成,第二行星轮系差速控制器单元由第二行星轮系和与之相连接的第二超越离合器构成;第一行星轮系包括第一支架2-1、第一大太阳轮2-2、第一行星齿轮2-3、第一小太阳轮 2-4、第一行星架2-5,第二行星轮系包括第二支架2-13、第二大太阳轮2-9、第二行星齿轮2-10、第二小太阳轮2-11、第二行星架2-12;第一支架2-1与主差速器壳体1-1通过螺栓连接在一起,第一大太阳轮2-2通过螺栓固定在第一支架2-1上,第一太小阳轮2-4通过螺栓2-7固定在桥壳上;第一行星架2-5 和第二行星架2-12通过花键空心轴2-6连接为一体,第二行星架2-12与第一超越离合器2-14的外圈通过螺栓连接为一体,转速为n
min
;第一超越离合器2-14的内圈和左离合器5-1通过花键连接在一起,右离合器5-2和右驱动半轴4通过花键连接在一起,当离合器5处于连接状态时,第一超越离合器2-14内圈的转速和右驱动半轴4及车轮的转速均为n2,此时,当第一超越离合器2-14的内圈的转速n2大于外圈的转速n
min
时,第一超越离合器2-14处于超越状态,互不影响;而当一超越离合器内圈的转速n2小于或等于外圈的转速n
min
时,第一超越离合器2-14处于契合状态,第一超越离合器的内、外圈一起旋转,转速均为n
min
,从而达到了限制转速n2不能低于转速n
min
的目的;第二小太阳轮2-11通过螺栓2-8固定在桥壳体上,第二大太阳轮2-9通过螺栓与第二支架2-13连接在一起,第二支架2-13与第二超越离合器2-15的外圈通过螺栓连接为一体,转速为n
max
,第二超越离合器2-15的内圈和左离合器5-1通过花键连接在一起,右离合器5-2和右驱动半轴4通过花键连接在一起,当离合器处于连接状态时,第二超越离合器2-15的内圈的转速和右驱动半轴4及车轮的转速均为n2,此时,当第二超越离合器2-15的内圈的转速n2小于外圈的转速n
max
时,第二离合器2-15处于超越状态,互不影响;而当第二超越离合器2-15的内圈的转速n2大于或等于外圈的转速n
max
时,第二超越离合器处于契合状态,第二超越离合器的内、外圈一起旋转,转速均为n
max
,从而达到了限制转速n2不能大于转速n
max
的目的。
52.本发明通过2个行星轮系差速控制器单元控制着左右车轮的转速被限定在设计允
许的差速范围n
min-n
max
之间,从而达到了自动限滑的目的。
53.本发明中,当第一超越离合器2-14的外圈转速小于内圈转速时,处于超越状态,反之,处于契合状态;当第二超越离合器2-15的外圈转速大于内圈转速时,处于超越状态,反之,处于契合状态。
54.本发明所述的离合器5的输入端5-1与离合器的输出端5-2通过牙嵌结合接在一起,离合器的输出端5-2内侧设有花键,可滑动地套在右半驱动轴上。在倒车时,拨动拨叉环使得离合器的输出端5-2沿右半驱动轴4滑动,离合器的输入端5-1和离合器的输出端5-2连接的牙嵌分开,使得第一超越离合器2-14和第二超越离合器2-15与右半轴脱开,实现车辆正常的倒车行驶。
55.本发明中,图11-图37是本发明涉及的主要零部件的结构示意图(二维线条图),以进一步直观表达本发明。
56.本发明的工作原理如下描述。
57.本发明一种行星轮系自动限滑差速器的工作原理如图2所示,本发明中主差速器 1的工作原理与常规差速器工作原理相同,发动机动力通过变速箱输入到主差速器,主差速器的动力分两路,一路通过行星轮将动力分配到左、右半轴,驱动车辆正常行驶;另一路通过差速器壳输入到行星轮系差速器控制单元,正常差速情况下,该部分空转不消耗功率,只有在车轮发生打滑超出正常差速范围的情况下,控制器才发挥控制转速的作用。
58.下面结合图2、图3所示,就其工作原理进行详细说明如下文:主差速器转速满足公式:n1 n2=2n0第一行星轮系差速器控制单元转速比的关系有:设因为齿轮3固定桥壳上,齿轮5与差速器行星架连为一体,所以n3=0,n5=n0,则有:第二行星轮系差数器控制单元转速比的关系有:设因为两个差速控制器行星轮系的行星架是固定连接在一起,所以转速相同,齿轮8固定在桥壳上,n8=0,则有:设n1、n2在最小转弯半径时,相对于n0的最大极限差速比为k,那么:n
min
=nh=(1-k)
·
n0,此转速与第一超越离合器外圈转速一致;n
max
=n6=(1 k)
·
n0,此转速与第二超越离合器外圈转速一致;β=2α;或车辆在最小转弯半径时候,左右差速最大,为了方便说明问题,假设某一车型k=30%为例,那么n
min
=0.7n0,n
max
=1.3n0。
59.当汽车直线行驶时,n1=n2=n0,nh=0.7n0,n6=1.3n0,由于第一、二行星轮系差速控制单元的行星架h与第一超越离合器的外圈连接为一体,转速nh小于和右驱动半轴连接在一起的内圈转速n2,所以第一超越离合器处于超越脱开状态;第二行星轮系差速控制单元的内太阳轮6与第二超越离合器的外圈连接在一起,外圈转速n6大于与右驱动半轴连接在一起的内圈转速n2,所以第二超越离合器也是处于超越脱开状态,汽车正常行驶。
60.当汽车以大于或等于最小转弯半径左转弯时,n1≥0.7n0,n2≤1.3n0,此时,第一行星轮系差速控制单元的第一超越离合器外圈的转速nh=0.7n0小于或等于内圈的转速n2,第一超越离合器处于超越脱开状态或内外圈以同一转速旋转,不影响右驱动半轴n2的转速;与此同时,第二行星轮系差速控制单元的第二超越离合器的外圈转速 n6=1.3n0大于或等于内圈的转速n2,第二超越离合器也处于超越脱开状态或内外圈以同一转速旋转,也不影响右驱动半轴n2的转速,汽车以正常差速左转弯。
61.当汽车以大于或等于最小转弯半径右转弯时,n1≤1.3n0,n2≥0.7n0,此时,第一行星轮系差速控制单元的第一超越离合器外圈的转速nh=0.7n0小于或等于内圈的转速n2,第一超越离合器处于超越脱开状态或内外圈以同一转速旋转,不影响右驱动半轴n2的转速;与此同时,第二行星轮系差速控制单元的第二超越离合器的外圈转速 n6=1.3n0大于或等于内圈的转速n2,第二超越离合器处于超越脱开状态或内外圈以同一转速旋转,也不影响右驱动半轴n2的转速,汽车以正常差速右转弯。
62.假设汽车左侧车轮打滑,超出正常差速范围,即当n1>1.3n0时,因为 n1 n2=2n0,那么必然有n2<0.7n0,此时第一行星轮系差速控制单元的第一超越离合器外圈的转速nh=0.7n0大于内圈的转速n2,第一超越离合器处于契合状态,使得右半轴n2的转速不能低于nh=0.7n0转速,限制了n1的转速继续增加,从而达到了限滑的目的,保证车辆正常行驶通过;与此同时,第二行星轮系差速控制单元的第二超越离合器的外圈转速n6=1.3n0大于内圈的转速n2,第二超越离合器处于超越脱开状态,不影响右半轴 n2的转速。
63.假设汽车右侧车轮打滑,当n2>1.3n0时,此时第一行星轮系差速控制单元的第一超越离合器外圈的转速nh=0.7n0小于内圈的转速n2,第一超越离合器处于超越脱开状态,不影响右半轴转速;与此同时,第二行星轮系差速控制单元的第二超越离合器的外圈转速n6=1.3n0小于内圈的转速n2,第二超越离合器处于契合状态,从而限制右驱动半轴n2的转速继续增加,达到了限滑的目的,保证车辆正常行驶通过。
64.综上所述,无论左、右车轮处于直线行驶、左右最小转弯半径还是打滑状态,该行星轮系差速控制器既能满足左右车轮最小转弯半径的最大差速要求,又能够在车辆即将超出正常差速,发生打滑时,及时自动限滑,从而保证车辆正常行驶通过。
65.进一步地,左右车轮转速变化曲线如图3所示;从图3可以看出,当车轮转速在设定的上下限阈值范围(1-k)n0———(1 k)n0的时候,车轮正常差速,满足最小转弯半径要求;当车轮打滑超出上下限阈值范围时,第一超越离合器、第二超越离合器限定了右车轮转速nh≤n2≤n6,或者(1-k)n0≤n2≤(1 k)n0,从而达到限滑目的,使得车辆自动防滑,及时脱困,正常行驶通过。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。