1.本发明涉及高铁消毒设备技术领域,具体涉及一种高铁车厢消毒机器人。
背景技术:
2.随着新型冠状病毒的发展,高速列车环境卫生状况日趋突出,对车厢的环境问题提出了严峻的挑战。而车厢内存在的病毒直接关系着人类的身体健康,因此,如何高效的对高速列车进行消毒是急需解决的问题。
3.目前,高速列车消毒方式仍然采用传统手工喷洒消毒,消毒严格规定了操作步骤和时间,其中仅车厢密闭静置就不得低于20分钟,最后还要完成接触面、座椅表面、座椅扶手等部位的擦拭,这种方式费时费力且效率低。随着客流量的增大,就需要增加消毒的频率,这样列车运营成本自然就升高。
4.随着消毒技术的发展,自动消毒技术开始用于列车消毒,如利用空调系统进行消毒。但这种方式消毒效率不高,并且在消毒过程中会对人体造成伤害。而且,由于传统手工喷洒消毒使用的消毒液腐蚀性强,可能会缩短座椅表面,接触面使用寿命,另外消毒液比例难以调配,这些成为高铁车厢传统手工喷洒消毒的难点。
5.在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
6.本发明的目的在于克服现有技术的不足,提供一种高铁车厢消毒机器人,本发明所要解决的技术问题是:消毒费时费力且效率低,并且消毒液腐蚀性强,可能会缩短座椅表面,接触面使用寿命。
7.本发明的目的是通过以下技术方案来实现的:
8.一种高铁车厢消毒机器人,包括机器人本体、控制单元、采集单元、信息识别模块、驱动行走组件、喷雾组件与电源单元,所述采集单元、喷雾组件均设在机器人本体上,同时电源单元、控制单元、信息识别模块均设在机器人本体内部主板上,所述机器人本体的底端面固定安装有底盘,同时驱动行走组件设在底盘的底端面,所述采集单元、信息识别模块、驱动行走组件、喷雾组件均与控制单元信号连接,同时控制单元与电源单元电连接,所述控制单元包括单片机,所述单片机信号连接有wifi模块、gps定位模块、故障检测模块与语音播放单元,所述机器人本体上设有操控屏。
9.在一个优选地实施方式中,所述驱动行走组件包括两个驱动轮、两个万向轮、减速机、驱动电机与运动控制器,两个所述驱动轮安装在底盘两侧,两个所述万向轮分别安置于底盘前后,所述驱动电机设在底盘上,减速机设在底盘上,同时驱动电机通过减速机与驱动轮传动连接。
10.在一个优选地实施方式中,所述喷雾组件包括升降杆、喷雾头与等离子消毒机,所述机器人本体的背面设有滑动槽,同时滑动槽的内部两侧均竖向固定安装有电动导轨,所
述升降杆设在滑动槽中,同时两侧均与电动导轨滑动连接,所述等离子消毒机设在机器人本体内部,所述喷雾头固定安装在升降杆的顶端面,同时喷雾头之间通过导管与等离子消毒机固定连接,所述喷雾头的外壁面依次开设有若干个呈圆形分布的喷孔。
11.在一个优选地实施方式中,所述采集单元包括红外测距传感器、采集探头,所述红外测距传感器设有两个,同时分别设在机器人本体的外壁面下端,所述采集探头设在机器人本体的上端面,所述采集探头包括视频拍摄探头、图片拍摄探头。
12.在一个优选地实施方式中,所述采集单元还包括光电传感器,所述光电传感器设有两个,同时两个光电传感器设在机器人本体的行进方向。
13.在一个优选地实施方式中,所述语音播放单元包括语音播放模块、扬声器,所述语音播放模块设在机器人本体内部主板上,所述扬声器设在机器人本体的上端侧面。
14.在一个优选地实施方式中,所述语音播放单元还包括预警模块、警报闪烁灯,同时预警模块、警报闪烁灯与单片机信号连接。
15.在一个优选地实施方式中,所述单片机信号连接有路线建模模块,同时路线建模模块信号连接有路线数据库。
16.在一个优选地实施方式中,所述机器人本体上设有保护机构,所述保护机构包括铁片与弹性垫体,所述铁片通过紧固螺钉固定绕在弹性垫圈的外部,所述机器人本体的内壁、外壁之间设有保护层,同时保护机构设在保护层中。
17.在一个优选地实施方式中,所述电源单元包括锂电池、电量显示模块,所述锂电池设在机器人本体内部主板上,同时电量显示模块与操控屏信号连接。
18.本发明的有益效果是:本发明高铁车厢消毒机器人,可以在列车行驶过程中在车厢内自主进行消毒工作,其中机器人通过使用无线定位方式来对机器人进行定位,可以精确地得知机器人目前的准确位置,当列车到站前5分钟,消毒机器人可以自主行走到列车上的停放位置以达到避开人流的目的;另外,本机器人采用等离子消毒的方式,使其可在人机共存的环境中移动使用,即此机器人能够高效的对高速列车进行消毒,解决背景技术中提到的问题。
附图说明
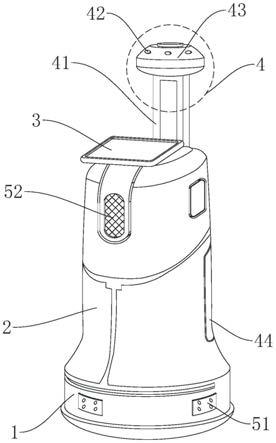
19.图1为本发明高铁车厢消毒机器人的整体结构示意图;
20.图2为本发明高铁车厢消毒机器人的仰视图;
21.图3为本发明万向轮的结构示意图;
22.图4为本发明图3中a处的局部放大图;
23.图5为本发明系统原理总框图;
24.图6为本发明控制单元、采集单元系统原理框图;
25.图7为本发明控制单元、语音播放单元系统原理框图;
26.图8为本发明控制单元、保护机构、电源单元系统原理框图;
27.附图标记为:1、底盘;110、驱动轮;120、万向轮;1201、安装轴;1202、连接轴;1203、中心圆盘;1204、环形滚动体;1205、支撑件;1206、辅助轮;1207、圆盘安装支架;1208、滚动体安装支架;1209、滑动槽;1210、滑动件;2、机器人本体;3、操控屏;4、喷雾组件;41、升降杆;42、喷孔;43、喷雾头;44、等离子消毒机;45、电动导轨;5、采集单元;51、红外测距传感
器;52、采集探头;521、视频拍摄探头;522、图片拍摄探头;53、光电传感器;6、语音播放单元;61、语音播放模块;62、扬声器;63、预警模块;64、警报闪烁灯;7、控制单元;71、单片机;8、电源单元;81、锂电池;82、电量显示模块;9、驱动行走组件;10、信息识别模块;11、wifi模块;12、gps定位模块;13、路线建模模块;14、保护机构;15、路线数据库;16、故障检测模块。
具体实施方式
28.下面结合附图进一步详细描述本发明的技术方案,但本发明的保护范围不局限于以下所述。
29.如图1~8所示,一种高铁车厢消毒机器人,包括机器人本体2、控制单元7、采集单元5、信息识别模块10、驱动行走组件9、喷雾组件4与电源单元8,采集单元5、喷雾组件4均设在机器人本体2上,同时电源单元8、控制单元7、信息识别模块10均设在机器人本体2内部主板上,机器人本体2的底端面固定安装有底盘1,同时驱动行走组件9设在底盘1的底端面,采集单元5、信息识别模块10、驱动行走组件9、喷雾组件4均与控制单元7信号连接,同时控制单元7与电源单元8电连接,控制单元7包括单片机71,单片机71信号连接有wifi模块11、gps定位模块12、故障检测模块16与语音播放单元6,机器人本体2上设有操控屏3。
30.驱动行走组件9包括两个驱动轮110、两个万向轮120、减速机、驱动电机与运动控制器,两个驱动轮110安装在底盘1中间两侧,两个万向轮120分别安置于底盘1前后两端,驱动电机设在底盘1上,减速机设在底盘1上,同时驱动电机的输出轴通过减速机传动与驱动轮110连接;优选地,所述万向轮120包括两个轮体、安装轴1201和连接轴1202,所述安装轴1201的顶端与底盘底部固定连接,所述安装轴1201的底端与连接轴1202的中部转动连接,所述轮体设置在连接轴1202的两端,轮体包括中心圆盘1203、环形滚动体1204、多个支撑件1205、以及至少一个辅助轮1206组件,所述中心圆盘1203设置环形滚动体1204内,且中心圆盘1203套设在连接轴1202端部,中心圆盘1203与连接轴1202转动连接,所述辅助轮1206组件包括倾斜设置的辅助轮1206,辅助轮1206、支撑件1205均位于中心圆盘1203和环形滚动体1204之间,且支撑件1205的两端分别与中心圆盘1203和环形滚动体1204连接。
31.具体地,所述辅助轮1206组件还包括圆盘安装支架1207、滚动体安装支架1208和限位轴,所述辅助轮1206套设在限位轴上,限位轴的一端通过圆盘安装支架1207与中心圆盘1203固定连接,限位轴的另一端通过滚动体安装支架1208与环形滚动体1204的内壁滑动连接。优选地,所述限位轴包括轴体和两个固定套设在轴体上的限位件,所述辅助轮1206位于两个限位件之间。优选地,所述安装支架位于轮体的外侧。优选地,所述限位轴或轴体与连接轴1202之间的夹角为45
°
。消毒机器人在车厢内需要避障时,万向轮120的轮体的外侧斜向分布着多个辅助轮1206,这些成45
°
角的辅助轮1206会把一部分的机轮转向力转化到万向轮120的法向力上,这些力最终合成在任何方向上的合力矢量,使消毒机器人任意方向上自由移动。
32.具体地,环形滚动体1204的内壁上设置有滑动槽1209,所述滑动槽1209内设置有与滑动槽1209配合的滑动件1210,所述滚动体安装支架1208与滑动件1210连接。
33.喷雾组件4包括升降杆41、喷雾头43与等离子消毒机44,机器人本体2的背面设有滑动槽,同时滑动槽的内部两侧均竖向固定安装有电动导轨45,升降杆41设在滑动槽中,同时两侧均与电动导轨45滑动连接,优选地,电动导轨45和升降杆41之间的配合可以选用现
有技术的电动丝杆传动控制喷雾头43完成升降动作;等离子消毒机44设在机器人本体2内部,喷雾头43固定安装在升降杆41的顶端面,同时喷雾头43之间通过导管与等离子消毒机44固定连接,优选地,所述导管为软管;喷雾头43的外壁面依次开设有若干个呈圆形分布的喷孔42,使用时,机器人本体2根据设定的程序进行消毒处理,即控制单元7利用电动导轨45带动升降杆41连同喷雾头高度43升高,那么控制单元7操作等离子消毒机44,并启动内部抽液泵将消毒液抽出至喷雾头43中,再从喷孔42中喷出消毒;优选地,消毒采用的消毒剂为浓度为3%的过氧化氢,浓度低,能自动分解,对物品伤害少,能有效对车厢环境进行消毒;采集单元5包括红外测距传感器51、采集探头52,红外测距传感器51设有两个,同时分别设在机器人本体2的外壁面下端,采集探头52设在机器人本体2的上端面,采集探头52包括视频拍摄探头521、图片拍摄探头522;采集单元5还包括光电传感器53,光电传感器53设有两个,同时两个光电传感器53设在机器人本体2的行进方向;语音播放单元6包括语音播放模块61、扬声器62,语音播放模块61设在机器人本体2内部主板上,扬声器62设在机器人本体2的上端侧面,安装的两个光电传感器53用于感知前方障碍物,使得机器人本体2在车厢过道内运动时需要检测前方是否有行人或障碍物,若有,则将高电平信号发送给控制单元7,即单片机71,那么单片机71操作驱动行走组件9及时停止进行避让,并利用语音播放模块61在扬声器62中进行播报;语音播放单元6还包括预警模块63、警报闪烁灯64,同时预警模块63、警报闪烁灯64与单片机71信号连接,当在行进操作的过程中,故障检测模块16检测到设备故障后,则发送信号给控制单元7,即单片机71,那么预警模块63将故障信息在扬声器62中进行播报,并开启警报闪烁灯64进行报警闪烁预示;单片机71信号连接有路线建模模块13,同时路线建模模块13信号连接有路线数据库15,在现场调试中,利用采集单元5中视频拍摄探头521、图片拍摄探头522,进行信息数据采集,并利用路线建模模块13建立模型储存于路线数据库15中,供机器人本体2进行操作使用;机器人本体2上设有保护机构14,保护机构14包括铁片与弹性垫体,铁片通过紧固螺钉固定绕在弹性垫圈的外部,机器人本体2的内壁、外壁之间设有保护层,同时保护机构14设在保护层中,设置的保护机构14,即铁片与弹性垫体,那么在安装之后,可以对机器人本体2内部元件进行保护,防止碰撞造成机器人本体2的损坏,提高使用寿命;电源单元8包括锂电池81、电量显示模块82,锂电池81设在机器人本体2内部主板上,同时电量显示模块82与操控屏3信号连接,锂电池81用于提供电源动力,电量显示模块82用于将锂电池81的电量显示于操控屏3上。
34.工作原理
35.一、组装阶段
36.先将喷雾组件4,即升降杆41、喷雾头43与等离子消毒机44安装于机器人本体2上,再将驱动行走组件9,即两个驱动轮110、两个万向轮120、减速机、驱动电机与运动控制器安装于机器人本体2上;
37.二、调试阶段
38.将采集单元5、语音播放单元6、信息识别模块10、路线数据库15、路线建模模块13、wifi模块11、故障检测模块16、gps定位模块12与控制单元7信号连接,并将控制单元7与电源单元8电连接,为设备提供电源动力,那么现场调试,再利用采集单元5中视频拍摄探头521、图片拍摄探头522,进行信息数据采集,并利用路线建模模块13建立模型储存于路线数据库15中,供机器人本体2进行操作使用;
39.三、操作阶段
40.按照设定程序,按下机器人本体2上的操作按钮,此时机器人本体2根据设定的程序进行消毒处理,即控制单元7利用电动导轨45带动升降杆41连同喷雾头高度43升高,那么控制单元7操作等离子消毒机44,并启动内部抽液泵将消毒液抽出至喷雾头43中,再从喷孔42中喷出消毒;
41.此过程中,安装的两个光电传感器53用于感知前方障碍物,使得机器人本体2在车厢过道内运动时需要检测前方是否有行人或障碍物,若有,则将高电平信号发送给控制单元7,即单片机71,那么单片机71操作驱动行走组件9及时停止进行避让,并利用语音播放模块61在扬声器62中进行播报;同时,由于万向轮120的轮体的外侧斜向分布着多个辅助轮1206,这些成45
°
角的辅助轮1206会把一部分的机轮转向力转化到万向轮120的法向力上,这些力最终合成在任何方向上的合力矢量,使消毒机器人任意方向上自由移动;
42.当在行进操作的过程中,故障检测模块16检测到设备故障后,则发送信号给控制单元7,即单片机71,那么预警模块63将故障信息在扬声器62中进行播报,并开启警报闪烁灯64进行报警闪烁预示;
43.而设置的两个红外测距传感器51,用于地面无线时候的转弯,当测试距离小于一个值便会向另一侧转弯;车前设有一对红外测距传感器51,起光电开关的作用;
44.而设置的保护机构14,即铁片与弹性垫体,那么在安装之后,可以对机器人本体2内部元件进行保护,防止碰撞造成机器人本体2的损坏,提高使用寿命。
45.以上所述仅是本发明的优选实施方式,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。