1.本发明涉及机械手技术领域,更具体地说,涉及一种模具加工用直线机械手及应用方法。
背景技术:
2.注塑模具是一种较为常见的加工模具,通常由上模座和下模座构成,上模座由啤机控制升降以及注塑,在注塑完成待工件冷却后开模,人工取出工件;
3.常规注塑模具的下料方式,由人工进行操作,存在一定的安全隐患,现有的一些下料机械手,大都与模具分体设置,成本较高,且难以进行与模具进行同步协调控制,需要一种与注塑模具相融合的模具加工用直线机械手。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种模具加工用直线机械手,还提供了一种模具加工用直线机械手应用方法。
5.本发明解决其技术问题所采用的技术方案是:
6.构造一种模具加工用直线机械手,其中,包括升降架,所述升降架由注塑模具的啤机带动升降,所述升降架上设置有连接上模座的连接座以及带动所述连接座升降的升降单元;所述升降架上设置有左活动臂和右活动臂;所述左活动臂包括左夹持块和带动其横向移动的单向丝杆,所述右活动臂包括右夹持块和带动其横向移动的往复丝杆;所述升降架上设置有联动组件和为所述连接座导向的导柱导套;所述连接座升降时通过所述联动组件带动所述单向丝杆和所述往复丝杆同步同向转动,所述往复丝杆运行至所述右夹块抵紧工件后达到换向临界点;所述左夹持块和所述右夹持块均为橡胶块。
7.本发明所述的模具加工用直线机械手,其中,所述升降架呈倒凹型,所述升降单元设置在所述升降架的倒凹型的内底部,所述左活动臂和所述右活动臂分别设置在所述升降架的倒凹型的两端。
8.本发明所述的模具加工用直线机械手,其中,所述联动组件包括设置在所述连接座的左右两端的纵向齿条、两个与所述纵向齿条一一对应啮合的输入齿轮、两个增速齿轮箱和两个输出齿轮;所述增速齿轮箱的输入端与所述输入齿轮同轴连接,所述增速齿轮箱的输出端与所述输出齿轮同轴连接;两个所述输出齿轮分别驱动所述单向丝杆和所述往复丝杆。
9.本发明所述的模具加工用直线机械手,其中,所述增速齿轮箱设置在所述升降架的倒凹型的内壁。
10.本发明所述的模具加工用直线机械手,其中,所述左活动臂和所述右活动臂均包括滑轨、沿所述滑轨滑动的横向杆和丝杆安装座;两个所述横向杆分别与所述单向丝杆和所述往复丝杆横向并排分布,且两个所述横向杆的端部分别连接有所述左夹持块和所述右夹持块;所述单向丝杆和所述往复丝杆上设置有与所述输出齿轮啮合的从动齿轮。
11.本发明所述的模具加工用直线机械手,其中,所述左夹持块和所述右夹持块用于夹持的表面设置有杂纹。
12.本发明所述的模具加工用直线机械手,其中,所述模具加工用直线机械手还包括位于所述往复丝杆下方的移料带单元。
13.一种模具加工用直线机械手应用方法,应用如上述的模具加工用直线机械手,其特征在于,实现方法如下:
14.模具注塑时,升降架和连接座均处于其行程的最低点,左夹持块和右夹持块分别位于注塑模具的左右两侧且与注塑模具开模处相正对;
15.模具注塑完成后,升降单元带动连接座上行,连接座带动上模座上行开模的同时,通过联动组件带动单向丝杆和往复丝杆同步同向转动,使得左夹持块和右夹持块伸入开模的模具内并夹持工件,此时往复丝杆到达换向临界点;
16.啤机带动升降架上行,进而带动左夹持块和右夹持块同步上行并将工件从下模座内取出;
17.升降单元带动连接座继续上行,此时往复丝杆越过换向临界点带动右夹持块反向移动,左夹持块继续沿原来的方向移动,进而将工件夹持移出注塑模具,完成下料。
18.本发明的有益效果在于:模具注塑时,升降架和连接座均处于其行程的最低点,左夹持块和右夹持块分别位于注塑模具的左右两侧且与注塑模具开模处相正对;模具注塑完成后,升降单元带动连接座上行,连接座带动上模座上行开模的同时,通过联动组件带动单向丝杆和往复丝杆同步同向转动,使得左夹持块和右夹持块伸入开模的模具内并夹持工件,此时往复丝杆到达换向临界点;啤机带动升降架上行,进而带动左夹持块和右夹持块同步上行并将工件从下模座内取出;升降单元带动连接座继续上行,此时往复丝杆越过换向临界点带动右夹持块反向移动,左夹持块继续沿原来的方向移动,进而将工件夹持移出注塑模具,完成下料;将下料机械手与注塑模具进行融合,结构简洁,成本低,避免了人工下料存在的安全隐患,同时与注塑模具同步性好,安装调试方便,下料效率能够得到提升。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
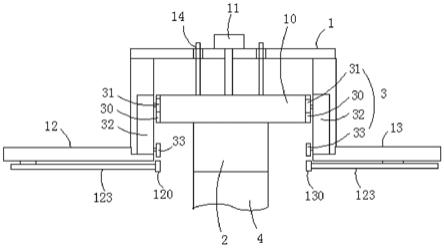
20.图1是本发明较佳实施例的模具加工用直线机械手结构示意图;
21.图2是本发明较佳实施例的模具加工用直线机械手左活动臂底面视图;
22.图3是本发明较佳实施例的模具加工用直线机械手应用方法流程图。
具体实施方式
23.为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
24.本发明较佳实施例的模具加工用直线机械手,如图1所示,同时参阅图2,包括升降
架1,升降架1由注塑模具的啤机带动升降,升降架1上设置有连接上模座2的连接座10以及带动连接座10升降的升降单元11;升降架1上设置有左活动臂12和右活动臂13;左活动臂12包括左夹持块120和带动其横向移动的单向丝杆121,右活动臂13包括右夹持块130和带动其横向移动的往复丝杆;升降架1上设置有联动组件3和为连接座10导向的导柱导套14;连接座10升降时通过联动组件3带动单向丝杆121和往复丝杆同步同向转动,往复丝杆运行至右夹块130抵紧工件后达到换向临界点;左夹持块和右夹持块均为橡胶块;
25.模具注塑时,升降架1和连接座10均处于其行程的最低点,左夹持块120和右夹持块130分别位于注塑模具的左右两侧且与注塑模具开模处相正对;模具注塑完成后,升降单元11带动连接座10上行,连接座10带动上模座2上行开模的同时,通过联动组件3带动单向丝杆121和往复丝杆同步同向转动,使得左夹持块120和右夹持块130伸入开模的模具内并夹持工件(注塑模具开模时,下模4会通过顶杆顶升工件脱模),此时往复丝杆到达换向临界点;啤机带动升降架1上行,进而带动左夹持块120和右夹持块130同步上行并将工件从下模座内取出;升降单元11带动连接座10继续上行,此时往复丝杆越过换向临界点带动右夹持块130反向移动,左夹持块120继续沿原来的方向移动,进而将工件夹持移出注塑模具,取下被夹持的工件完成下料;
26.将下料机械手与注塑模具进行融合,结构简洁,成本低,避免了人工下料存在的安全隐患,同时与注塑模具同步性好,安装调试方便,下料效率能够得到提升。
27.优选的,升降架1呈倒凹型,升降单元11设置在升降架1的倒凹型的内底部,左活动臂12和右活动臂13分别设置在升降架1的倒凹型的两端;结构合理且紧凑,可靠性好,且易于装配调试。
28.优选的,联动组件3包括设置在连接座10的左右两端的纵向齿条30、两个与纵向齿条30一一对应啮合的输入齿轮31、两个增速齿轮箱32和两个输出齿轮33;增速齿轮箱32的输入端与输入齿轮31同轴连接,增速齿轮箱32的输出端与输出齿轮33同轴连接;两个输出齿轮33分别驱动单向丝杆121和往复丝杆;
29.连接座10上升时,带动纵向齿条30上行,进而带动两个输入齿轮31转动,增速齿轮箱32将该输入的转速进行适应性增大,并由输出齿轮33进行输出并带动丝杆运行,结构合理且紧凑,可靠性好,精度高,整体体积较小且同步性好;此外,应用增速齿轮箱来进行增速,可以将连接座小幅度的高度上升进行快速转换成左夹持块和右夹持块的较大幅度的横向移动动作,具体的转换率可根据实际需要进行设置。
30.优选的,增速齿轮箱3设置在升降架1的倒凹型的内壁;设置简洁,安装方便。
31.优选的,左活动臂12和右活动臂13均包括滑轨122、沿滑轨滑动的横向杆123和丝杆安装座124;两个横向杆123分别与单向丝杆121和往复丝杆横向并排分布,且两个横向杆123的端部分别连接有左夹持块120和右夹持块130;单向丝杆121和往复丝杆上设置有与输出齿轮啮合的从动齿轮125;将横向杆和丝杆进行并排设置,能够有效的进行节省空间,且稳定性好;整体设置结构合理且紧凑;
32.右活动臂的设置结构与左活动臂设置一致,区别在于丝杆类型不同,此处不再赘述。
33.优选的,左夹持块120和右夹持块130用于夹持的表面设置有杂纹;便于保障夹持的可靠性。
34.优选的,模具加工用直线机械手还包括位于往复丝杆下方的移料带单元(图中未显示);方便进行下料。
35.一种模具加工用直线机械手应用方法,应用如上述的模具加工用直线机械手,如图2所示,实现方法如下:
36.s01:模具注塑时,升降架和连接座均处于其行程的最低点,左夹持块和右夹持块分别位于注塑模具的左右两侧且与注塑模具开模处相正对;
37.s02:模具注塑完成后,升降单元带动连接座上行,连接座带动上模座上行开模的同时,通过联动组件带动单向丝杆和往复丝杆同步同向转动,使得左夹持块和右夹持块伸入开模的模具内并夹持工件,此时往复丝杆到达换向临界点;
38.s03:啤机带动升降架上行,进而带动左夹持块和右夹持块同步上行并将工件从下模座内取出;
39.s04:升降单元带动连接座继续上行,此时往复丝杆越过换向临界点带动右夹持块反向移动,左夹持块继续沿原来的方向移动,进而将工件夹持移出注塑模具,完成下料;
40.将下料机械手与注塑模具进行融合,结构简洁,成本低,避免了人工下料存在的安全隐患,同时与注塑模具同步性好,安装调试方便,下料效率能够得到提升。
41.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
