管料自动套帽装置及管料包装装置
【技术领域】
1.本发明涉及管料加工装置领域,尤其涉及管料自动套帽装置及管料包装装置。
背景技术:
2.管料制作完成后需要进行打包处理,需要对管料进行探伤、刻字、套帽、包装,最后才能进行运输。在上述的一些过程中,很多步骤需要人工进行,员工劳动强度高、工作效率低。
3.为了减少人力投入,需要能够一套能够自动化进行管料处理的设备。
4.管料处理完成后,便可以对管料进行打包,为了使管料保持洁净,需要避免灰尘等在管料运输或包装阶段进入到管料内部。
技术实现要素:
5.本发明所要解决的技术问题在于克服现有技术的不足而提出管料自动套帽装置,实现自动化的向管料的两端塞入直管内塞,降低人力投入。
6.为解决上述技术问题,本发明采用如下技术方案:
7.管料自动套帽装置,包括三台径向管料转移装置和两台管料塞帽装置,所述径向管料转移装置之间设有固定装置,用于在对管料进行塞帽作业时保持管料的固定,两台管料塞帽装置分别用于对管料的两端进行塞帽作业,两台管料塞帽装置分别对应两组固定装置设置,所述径向管料转移装置用于横向传送管料,所述径向管料转移装置包括横向传送机架、设置于所述横向传送机架上的拨料杆件,所述横向传送机架上设有用于驱动所述拨料杆件横向拨动管料的动力装置,所述管料塞帽装置包括装置本体,所述装置本体上设有四轴机器人、位于所述四轴机器人下方的推帽臂,所述装置本体内设有储料组件,直管内塞存放于储料组件内,所述四轴机器人包括用于夹持直管内塞对机械夹臂,所述推帽臂将机械夹臂夹持的直管内塞推入管料端部,所述固定装置包括固定机架、设于固定机架上用于夹紧管料的夹紧机构和检测管料上直管内塞的探测头。
8.在上述方案的基础上,所述动力装置包括动力电机、与所述动力电机传动连接的传动装置,所述传动装置通过连接块连接所述拨料杆件,所述连接块一端连接传动装置,另一端转动连接拨料杆件,所述横向传送机架上还设有圆形滑块,所述拨料杆件上设有与所述圆形滑块滑动配合的导向滑槽。
9.在上述方案的基础上,所述拨料杆件包括拨料杆体,所述拨料杆体的一端设有拨料挂钩,所述拨料挂钩在拨料杆件自管料下方复位时将管料定位在拨料杆体上。
10.在上述方案的基础上,所述传动装置包括传动支座、转动安装在所述传动支座上的皮带轮,所述动力电机通过传送皮带与所述皮带轮传动连接,所述皮带轮通过传动杆连接所述连接块。
11.在上述方案的基础上,所述横向传送机架上沿管料长度方向设置多个拨料杆件,所述横向传送机架上还设有贯穿所述多个拨料杆件的连接杆体。
12.在上述方案的基础上,所述四轴机器人包括机器人本体,所述机械夹臂通过伸缩杆连接在所述机器人本体上,所述机械夹臂包括夹臂基座和设置于所述夹臂基座下方的一对夹板,所述机械夹臂将直管内塞夹持在夹板之间。
13.在上述方案的基础上,所述推帽臂包括设于所述装置本体上的安装座体、设于所述安装座体上的推动气缸,所述推动气缸的端部设有推压板,所述推压板对应两片夹板间的中心部位设置。
14.在上述方案的基础上,所述储料组件包括物料桶、位于所述物料桶上方的输送机、位于所述物料桶下方的振料盘,所述物料桶上端对应所述输送机敞开设置,所述物料桶的下端对应所述振料盘敞开设置,所述物料桶的底壁朝向振料盘方向倾斜设置。
15.在上述方案的基础上,所述夹紧装置包括夹紧支架,所述夹紧支架上端设有v形卡槽,所述夹紧支架侧部设有夹紧气缸,所述夹紧气缸连接于所述v形卡槽适配的v形卡块,所述拨料杆件驱动管料沿v形卡块表面上升并越过v形卡块。
16.管料包装装置,包括上述的管料自动套帽装置。
17.本发明的有益效果:
18.本发明公开了管料自动套帽装置,包括三台径向管料转移装置、两台管料塞帽装置、两台固定装置,径向管料转移装置用于径向传送管料,使管料能够从一台固定装置横向移动至另一台固定装置上,管料塞帽装置对应固定装置设置,在管料传送至固定装置上后对管料进行塞帽作业,两台管料塞帽装置分别对管料的两端进行塞帽,以将管料的内部进行密封,当管料的一端完成塞帽后,通过探测头对管料进行检测,若是塞帽成功,则将管料传送至另一台固定装置上继续进行塞帽,若是塞帽未成功,便可以将这根管料筛选出来,避免送入到固定装置上,从而可以保证管料的处理效率,在进行塞帽时,利用夹紧机构夹紧管料,使管料保持静止,这样一来在塞帽过程中,管料不会在外力作用下出现位置变化而增大塞帽难度。
19.进一步的,所述动力装置包括动力电机、与所述动力电机传动连接的传动装置,所述传动装置通过连接块连接所述拨料杆件,所述连接块一端连接传动装置,另一端转动连接拨料杆件,所述横向传送机架上还设有圆形滑块,所述拨料杆件上设有与所述圆形滑块滑动配合的导向滑槽。进行管料的横向移动时,动力电机启动将动力传递至传动装置上,传动装置驱动连接块转动,连接块转动过程中推动拨料杆件朝向管料方向移动,同时连接块还驱动拨料杆件向下移动以使拨料杆件移动至管料下方,圆形滑块在导向滑槽内滑动,对拨料杆件进行定位,防止拨料杆件自主地相对连接块转动而影响管料的传送,随着连接块继续转动,驱动拨料杆件复位,拨料杆件复位时带动管料向上活动,使得管料落入至拨料杆件上,并沿着拨料杆件表面移动,实现管料的径向传送。
20.进一步的,所述拨料杆件包括拨料杆体,所述拨料杆体的一端设有拨料挂钩,所述拨料挂钩在拨料杆件自管料下方复位时将管料定位在拨料杆体上。拨料挂钩凸出于拨料杆体上,随着拨料杆件向上移动,可以带动管料一同移动,以传送管料,位于拨料杆体上的管料在拨料挂钩的限位作用下,得以保持在拨料杆体上,当拨料杆件复位后,拨料杆件上设置了拨料挂钩的一端高度高于另一端,使管料能够从拨料杆件的另一端滑落,完成管料的横向转移。
21.进一步的,所述传动装置包括传动支座、转动安装在所述传动支座上的皮带轮,所
述动力电机通过传送皮带与所述皮带轮传动连接,所述皮带轮通过传动杆连接所述连接块。动力电机启动后通过传送皮带驱动皮带轮转动,皮带轮转动时通过传动杆驱动连接块转动,从而驱动拨料杆件移动。
22.进一步的,所述横向传送机架上沿管料长度方向设置多个拨料杆件,所述横向传送机架上还设有贯穿所述多个拨料杆件的连接杆体。通过连接杆体同时连接多个拨料杆件,这样一来只需要其中一个拨料杆件与传动装置传动连接,即可实现所有的拨料杆件同步运动,使管料的运动可以保持平稳,不易出现位置偏移,使管料的横向转移得以顺利进行。
23.进一步的,所述四轴机器人包括机器人本体,所述机械夹臂通过伸缩杆连接在所述机器人本体上,所述机械夹臂包括夹臂基座和设置于所述夹臂基座下方的一对夹板,所述机械夹臂将直管内塞夹持在夹板之间。在伸缩杆的作用下机械夹臂在竖直方向的位置可以进行调节,以下降在振料盘上夹持直管内塞,同时也可以根据管料规格调整机械夹臂的位置,以使直管内塞可以对准管料轴心,避免塞帽过程中出现未对齐而导致直管内塞破损或塞帽失败的现象。
24.进一步的,所述推帽臂包括设于所述装置本体上的安装座体、设于所述安装座体上的推动气缸,所述推动气缸的端部设有推压板,所述推压板对应两片夹板间的中心部位设置。推动气缸可以驱动推压板移动,以向管料方向推动被夹板夹持的直管内塞,使直管内塞塞入至管料内,推压板可以覆盖较大的范围,即使处理不同尺寸的管料,也可以顺利地将直管内塞推入。
25.进一步的,所述储料组件包括物料桶、位于所述物料桶上方的输送机、位于所述物料桶下方的振料盘,所述物料桶上端对应所述输送机敞开设置,所述物料桶的下端对应所述振料盘敞开设置,所述物料桶的底壁朝向振料盘方向倾斜设置。物料桶内存放的直管内塞的数量有限,通过输送机可以将直管内塞从物料桶上部的敞开处送入到物料桶内,再通过物料桶下部的敞开处送入至振料盘上。
26.进一步的,所述夹紧装置包括夹紧支架,所述夹紧支架上端设有v形卡槽,所述夹紧支架侧部设有夹紧气缸,所述夹紧气缸连接于所述v形卡槽适配的v形卡块,所述拨料杆件驱动管料沿v形卡块表面上升并越过v形卡块。v形卡槽对管料具有定位作用,当管料传送至夹紧支架上后,便可以自然地沿着v形卡槽的内壁滚动至v形卡槽的中心部位,以对应机械夹臂,夹紧气缸驱动v形卡块下降以夹紧管料,当管料完成塞帽后,拨料杆件带动管料向上移动,管料接触到v形卡块后可以沿着v形卡块外侧的斜面移动而越过v形卡块。
27.本发明还公开了管料包装装置,用于对成品的管料进行处理并打包,采用了上述中的管料自动套帽装置自动化的对管料进行塞帽作业,塞帽不成功的管料会被筛除,从而保证了良品率。
28.本发明的这些特点和优点将会在下面的具体实施方式、附图中详细的揭露。
【附图说明】
29.下面结合附图对本发明做进一步的说明:
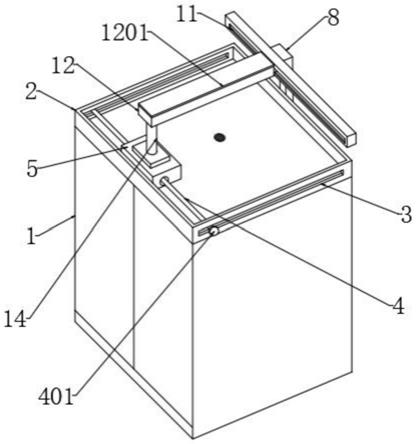
30.图1为本发明实施例中管料自动套帽装置的结构示意图;
31.图2为图1中a处的放大示意图;
32.图3为本发明实施例中径向管料转移装置的结构示意图;
33.图4为图3中c处的放大示意图;
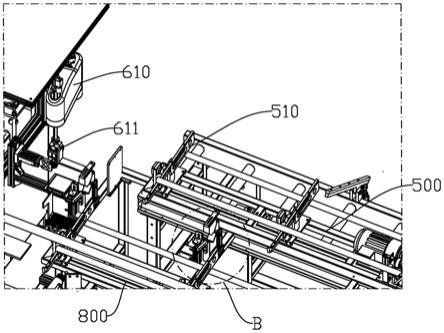
34.图5为本发明实施例中管料塞帽装置的结构示意图;
35.图6为图5中d处的放大示意图;
36.图7为图2中b处的放大示意图。
37.附图标记:
38.横向传送机架500、拨料杆件510、拨料杆体511、拨料挂钩512、硅胶摩擦件513、动力装置520、动力电机521、连接块522、传动支座523、皮带轮524、传送皮带525、圆形滑块530、导向滑槽531、连接杆体540;
39.装置本体600、视觉探头601、四轴机器人610、机械夹臂611、机器人本体612、伸缩杆613、夹臂基座614、夹板615、推帽臂620、安装座体621、推动气缸622、推压板623、物料桶630、振料盘631、输送机631、限位挡板632;
40.固定机架800、夹紧机构810、夹紧支架811、v形卡槽812、夹紧气缸813、v形卡块814。
【具体实施方式】
41.下面结合本发明实施例的附图对本发明实施例的技术方案进行解释和说明,但下述实施例仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其他实施例,都属于本发明的保护范围。
42.下文中出现的诸如“示例性”“一些实施例”等词意为“用作例子、实施例或说明性”,作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。为了更好的说明本发明,在下文的具体实施方式中给出了众多的具体细节,本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。
43.参照图1至图7,本发明实施例公开了管料自动套帽装置,包括三台径向管料转移装置、两台管料塞帽装置、两台固定装置,固定装置设于相邻两台径向管料转移装置之间,径向管料转移装置用于径向传送管料,使管料能够从一台固定装置横向移动至另一台固定装置上,管料塞帽装置对应固定装置设置,在管料传送至固定装置上后对管料进行塞帽作业,固定装置用于在对管料进行塞帽作业时保持管料的固定,两台管料塞帽装置分别对管料的两端进行塞帽,以将管料的内部进行密封。
44.固定装置包括固定机架800、设于固定机架800上用于夹紧管料的夹紧机构810和检测管料上直管内塞的探测头,夹紧机构810用于夹紧管料,使管料保持静止,这样一来在塞帽过程中,管料不会在外力作用下出现位置变化而增大塞帽难度,当管料的一端完成塞帽后,通过探测头对管料进行检测,若是塞帽成功,则将管料传送至另一台固定装置上继续进行塞帽,若是塞帽未成功,便可以将这根管料筛选出来,避免送入到固定装置上,从而可以保证管料的处理效率。
45.其中,管料塞帽装置包括装置本体600,装置本体600上设有四轴机器人610、位于四轴机器人610下方的推帽臂620,装置本体600内设有储料组件,储料组件包括物料桶630、位于物料桶630下方的振料盘631,直管内塞存放于物料桶630并由物料桶630传送至振料盘631上,四轴机器人610包括机械夹臂611,用于夹持振料盘631上的直管内塞,推帽臂620将
机械夹臂611夹持的直管内塞推入管料端部。
46.管料塞帽装置用于将直管内塞塞入至管料的端部内,以将管料进行封闭,避免灰尘进入到管料内部,直管内塞放置在储料组件内,进行塞帽作业时,直管内塞掉落至振料盘631上,振料盘631产生震动将直管内塞振动直至直管内塞倾倒,通过四轴机器人610将机械夹臂611移动至振料盘631上方以夹持直管内塞,随后四轴机器人610带动机械夹臂611复位以使直管内塞正对管料中心,最后推帽臂620将直管内塞推入至管料端部内。
47.其中,四轴机器人610包括机器人本体612,机械夹臂611通过伸缩杆613连接在机器人本体612上,机械夹臂611包括夹臂基座614和设置于夹臂基座614下方的一对夹板615,机械夹臂611将直管内塞夹持在夹板615之间。在伸缩杆613的作用下机械夹臂611在竖直方向的位置可以进行调节,以下降在振料盘631上夹持直管内塞,同时也可以根据管料规格调整机械夹臂611的位置,以使直管内塞可以对准管料轴心,避免塞帽过程中出现未对齐而导致直管内塞破损或塞帽失败的现象。
48.推帽臂620包括设于装置本体600上的安装座体621、设于安装座体621上的推动气缸622,推动气缸622的端部设有推压板623,推压板623对应两片夹板615间的中心部位设置。推动气缸622可以驱动推压板623移动,以向管料方向推动被夹板615夹持的直管内塞,使直管内塞塞入至管料内,推压板623可以覆盖较大的范围,即使处理不同尺寸的管料,也可以顺利地将直管内塞推入。
49.装置本体600上设有对应振料盘631设置的视觉探头601,用于设备振料盘631上翻倒的直管内塞。视觉探头601可以识别位于振料盘631上的直管内塞的状态,使机械夹臂611可以夹持倾倒的直管内塞,以顺利进行塞帽操作。
50.储料组件还包括位于物料桶630上方的输送机631,物料桶630上端对应输送机631敞开设置,物料桶630的下端对应振料盘631敞开设置,物料桶630的底壁朝向振料盘631方向倾斜设置。物料桶630内存放的直管内塞的数量有限,通过输送机631可以将直管内塞从物料桶630上部的敞开处送入到物料桶630内,再通过物料桶630下部的敞开处送入至振料盘631上。
51.振料盘631上沿其周向设有限位挡板632。振料盘631的产生的振动能使直管内塞在振料盘631上振动、移动,通过设置限位挡板632可以将直管内塞限位至振料盘631上,以避免直管内塞从振料盘631上掉落。
52.径向管料转移装置包括横向传送机架500、设置于横向传送机架500上的拨料杆件510,横向传送机架500上设有用于驱动拨料杆件510的动力装置520,动力装置520包括动力电机521、与动力电机521传动连接的传动装置,传动装置通过连接块522连接拨料杆件510,连接块522一端连接传动装置,另一端转动连接拨料杆件510,传动装置驱动连接块522转动,横向传送机架500上还设有圆形滑块530,拨料杆件510上设有与圆形滑块530滑动配合的导向滑槽531。
53.进行管料的横向移动时,动力电机521启动将动力传递至传动装置上,传动装置驱动连接块522转动,连接块522转动过程中推动拨料杆件510朝向管料方向移动,同时连接块522还驱动拨料杆件510向下移动以使拨料杆件510移动至管料下方,圆形滑块530在导向滑槽531内滑动,对拨料杆件510进行定位,防止拨料杆件510自主地相对连接块522转动而影响管料的传送,随着连接块522继续转动,驱动拨料杆件510复位,拨料杆件510复位时带动
管料向上活动,使得管料落入至拨料杆件510上,并沿着拨料杆件510表面移动,实现管料的径向传送。
54.其中,拨料杆件510包括拨料杆体511,拨料杆体511的一端设有拨料挂钩512,拨料挂钩512在拨料杆件510自管料下方复位时将管料定位在拨料杆体511上。拨料挂钩512凸出于拨料杆体511上,随着拨料杆件510向上移动,可以带动管料一同移动,以传送管料,位于拨料杆体511上的管料在拨料挂钩512的限位作用下,得以保持在拨料杆体511上,当拨料杆件510复位后,拨料杆件510上设置了拨料挂钩512的一端高度高于另一端,使管料能够从拨料杆件510的另一端滑落,完成管料的横向转移。
55.传动装置包括传动支座523、转动安装在传动支座523上的皮带轮524,动力电机521通过传送皮带525与皮带轮524传动连接,皮带轮524通过传动杆连接连接块522。动力电机521启动后通过传送皮带525驱动皮带轮524转动,皮带轮524转动时通过传动杆驱动连接块522转动,从而驱动拨料杆件510移动。
56.横向传送机架500上沿管料长度方向设置多个拨料杆件510,横向传送机架500上还设有贯穿多个拨料杆件510的连接杆体540。通过连接杆体540同时连接多个拨料杆件510,这样一来只需要其中一个拨料杆件510与传动装置传动连接,即可实现所有的拨料杆件510同步运动,使管料的运动可以保持平稳,不易出现位置偏移,使管料的横向转移得以顺利进行。
57.为了保持管料的稳定,降低管料的位置偏移,拨料杆体511上表面设有硅胶摩擦件513。硅胶摩擦件513与管料之间具有较大的摩擦系数,管料在传送过程中,通过与硅胶摩擦件513之间的摩擦力可以对管料进行轴向定位。
58.夹紧装置810包括夹紧支架811,夹紧支架811上端设有v形卡槽812,夹紧支架811侧部设有夹紧气缸813,夹紧气缸813连接于v形卡槽812适配的v形卡块814,拨料杆件510驱动管料沿v形卡块814表面上升并越过v形卡块814。v形卡槽812对管料具有定位作用,当管料传送至夹紧支架811上后,便可以自然地沿着v形卡槽812的内壁滚动至v形卡槽812的中心部位,以对应机械夹臂611,夹紧气缸813驱动v形卡块814下降以夹紧管料,当管料完成塞帽后,拨料杆件510带动管料向上移动,管料接触到v形卡块814后可以沿着v形卡块814外侧的斜面移动而越过v形卡块814,朝径向方向移动。
59.本发明还公开了管料包装装置,用于对成品的管料进行处理并打包,采用了上述中的管料自动套帽装置自动化的对管料进行塞帽作业,塞帽不成功的管料会被筛除,从而保证了良品率。
60.本发明实施例可应用于即热式热水器、家用饮水机等产品。
61.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。