技术特征:
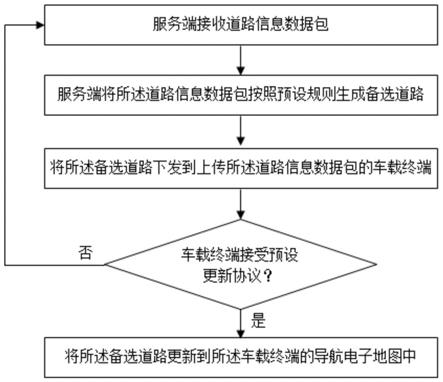
1.一种车载导航地图道路更新方法,其特征在于,包括:步骤1、服务端接收道路信息数据包;步骤2、服务端将所述道路信息数据包按照预设规则生成备选道路;步骤3、将所述备选道路下发到上传所述道路信息数据包的车载终端;步骤4、判断所述车载终端是否接受预设更新协议,是则将所述备选道路更新到所述车载终端的导航电子地图中,否则返回步骤1;所述道路信息数据包包括:上传所述信息的车辆识别码、gps数据、车辆抖动数据、车速信息、道路图像。2.根据权利要求1所述的车载导航地图道路更新方法,其特征在于,所述步骤1包括:步骤101、判断当前车辆是否位于导航电子地图中的未知道路,是则进入下一步;步骤102、控制所述车辆以预设周期获取并上传gps数据、车辆抖动数据、车速信息;步骤103、同步获取道路图像,并将gps数据嵌入所述道路图像后上传到服务端;步骤104、将所述gps数据、车辆抖动数据、车速信息、道路图像添加未知道路标签后以预设格式打包为道路信息数据包上传到服务端;步骤105、判断当前车辆是否已位于所述导航电子地图中的已知道路,是则停止上传所述道路信息数据包,否则返回步骤102。3.根据权利要求1所述的车载导航地图道路更新方法,其特征在于,所述步骤2包括:步骤201、判断所述车速信息、车辆抖动数据是否在预设范围内,是则进入下一步,否则判定所述道路信息数据包无效并丢弃;步骤202、将各gps坐标按照时间顺序连接得到道路主线;步骤203、解析所述道路图像,获取其中的gps时间、gps坐标,并对道路图像进行识别,得到车道线图,所述车道线图包括车道线、路面方向标识线、车道数量、车道宽度;步骤204、融合所述道路主线、车道线图,生成备选道路。4.根据权利要求3所述的车载导航地图道路更新方法,其特征在于,所述步骤202包括:步骤2021、以所述各gps坐标中任意相邻两点为第一端点、第二端点,连接所述第一端点、第二端点得到微路段;步骤2022、以所述第一端点、第二端点为中点、所述导航电子地图的误差范围为长度,分别向两侧做垂直于所述微路段的线段,得到第一延伸线段、第二延伸线段,分别连接所述第一延伸线段、第二延伸线段的同侧端点得到误差矩形;步骤2023、以所述第一端点、第二端点为圆心,以所述第一延伸线段、第二延伸线段为半径分别做第一半圆、第二半圆;步骤2024、将所述第一半圆、第二半圆、误差矩形组成的区域确定为所述微路段的影响区域;步骤2025、判断所述影响区域与相邻道路的影响区域是否重叠,是则对所述微路段进行标记;步骤2026、判断已标记的微路段占全部微路段数量的比值是否超过预设比值,是则判定所述各gps坐标为误差信号并丢弃,否则进入下一步;步骤2027、判断所有微路段的长度总和是否大于预设长度值,是则判定所述各gps坐标为有效并进入下一步,否则丢弃;
步骤2028、将所述各gps坐标按照时间顺序连接得到道路主线。5.根据权利要求4所述的车载导航地图道路更新方法,其特征在于,所述预设比值为50%。6.根据权利要求3所述的车载导航地图道路更新方法,其特征在于,步骤204包括:步骤2041、将所述道路主线、车道线图转换到同一坐标系中;步骤2042、将所述道路主线中的各微道路按照预设合并规则进行合并得到子道路,所述预设合并规则为:若相邻微道路之间的夹角不超过预设角度阈值,则所述相邻微道路合并为子道路,否则不进行合并;步骤2043、从所述子道路中读取任意一段作为当前子道路,确定所述子道路的走向;步骤2044、根据所述当前子道路的gps坐标,读取所述当前子道路对应的车道线图,获取对应的车道线、路面方向标识线、车道数量、车道宽度;步骤2045、将所述车道线图中路面方向标识线的方向与所述当前子道路的走向一致的车道确定为参考车道;步骤2046、旋转、平移所述车道线图直至所述参考车道的中心线与所述当前子道路重合,生成备选道路。7.根据权利要求6所述的车载导航地图道路更新方法,其特征在于,所述预设角度阈值为5
°
。8.根据权利要求3所述的车载导航地图道路更新方法,其特征在于,在所述步骤204之后还包括:步骤205、判断所述备选道路与所述导航电子地图中的现有道路是否存在交叉,是则获取交叉范围;步骤206、判断在所述交叉范围内所述导航电子地图中的现有道路的各点gps海拔与所述备选道路的对应各点gps海拔之差超过预设海拔阈值的坐标数量是否大于预设值,是则判定所述交叉范围为立体结构,否则判定所述交叉范围为平面结构;步骤207、若所述交叉范围为是平面结构,则将在所述交叉范围内将所述备选道路与所述现有道路联通,否则不与所述现有道路联通。9.根据权利要求8所述的车载导航地图道路更新方法,其特征在于,所述步骤205包括:若所述所述备选道路gps坐标中的经纬度与所述导航电子地图中的现有道路的gps坐标中的经纬度相同,则判断存在交叉。10.根据权利要求1所述的车载导航地图道路更新方法,其特征在于,在所述步骤4之后还包括:步骤5、设定所述备选道路的初始权值;步骤6、当再次接收到所述备选道路的道路信息数据包后,判断上传者是否为相同车辆,是则将所述初始权值递减第一数值,否则将所述初始权值递减第二数值,所述第一数值小于所述第二数值;步骤7、当所述初始权值为0时,将所述备选道路的属性设置为待现场确认模式,发出相应提示信息;步骤8、检测所述备选道路的属性是否变更为正式道路,是则将所述备选道路更新到云端地图。
技术总结
本发明提供车载导航地图道路更新方法,方法包括:步骤1、服务端接收道路信息数据包;步骤2、服务端将所述道路信息数据包按照预设规则生成备选道路;步骤3、将所述备选道路下发到上传所述道路信息数据包的车载终端;步骤4、判断所述车载终端是否接受预设更新协议,是则将所述备选道路更新到所述车载终端的导航电子地图中,否则返回步骤1。本发明通过用户上传的道路信息数据包生成实际存在但导航电子地图上不存在的道路,实现避免导航电子地图道路更新缓慢导致绕路或者到不了目的地的问题,提高了用户体验。了用户体验。了用户体验。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:惠州华阳通用智慧车载系统开发有限公司
技术研发日:2021.11.29
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。