1.本发明涉及半导体技术领域,尤其涉及一种晶圆方向判定系统及方法。
背景技术:
2.随着半导体制造领域的技术革新,晶圆键合在半导体异质集成制造领域的作用日渐突出。例如,铌酸锂、钽酸锂等铁电单晶作为一种性能优异的铁电单晶半导体,因其具有良好的光电、声光、压电、双折射、非线性等物理特性及耐高温、抗腐蚀、机械性能稳定等特性,被广泛应用于滤波器、光电调制器、光波导、倍频转换器、全息存储等方面。随着近年来,稀土掺杂工程、畴工程、近化学计量比生长和加工技术的完善,有关铌酸锂光电子器件如全光信号处理、光学数据存储、光学传感等领域更是迅猛发展。
3.而目前晶圆在键合前需要进行清洗处理,然后将晶圆的正面与衬底层进行键合处理,这就需要对晶圆的正反面作出区分,如果将晶圆的反面误以为是晶圆的正面,将导致键合失败,影响工作效率以及晶圆的成品良率。
4.现有技术是通过人工对晶圆大小切边的位置来判定晶圆的正反面,但由于量产时晶圆的数量过多,如果还通过人工区分的话,一方面工作量大,增加劳动成本,另一方面还会出现区分错误的现象,造成生产晶圆的良率低的问题。
技术实现要素:
5.本发明提供一种晶圆方向判定系统及方法,以解决当晶圆生产数量过多时,通过人工区分晶圆方向,不仅增加劳动成本,而且还会出现人工区分出现错误的情况,最终导致晶圆成品良率低的问题。
6.第一方面,本技术实施例提供了一种晶圆方向判定系统,所述系统包括:光源控制器、工控机和视觉检测装置;
7.所述光源控制器用于将光源打开并照射在位于黑色非反光背景台面上的晶圆;
8.所述工控机与所述视觉检测装置电连接,所述工控机用于控制相机对所述晶圆拍摄,并将拍摄的晶圆图片传输至所述视觉检测装置;
9.所述视觉检测装置用于自动识别所述晶圆图片中所述晶圆大切边的中垂线位置,从中垂线位置开始顺时针旋转计算与所述晶圆小切边中垂线之间的夹角角度,得到角度值;
10.根据所述角度值与预设角度值比较,若等于则判定所述晶圆为正面;
11.若不等于,则判定所述晶圆为反面。
12.进一步地,所述系统还包括报警装置,所述报警装置与所述视觉检测装置电连接,所述报警装置用于在所述视觉检测装置判断出现所述角度值与预设角度值不等于的情况下,发出报警信号。
13.进一步地,所述预设角度值根据所述晶圆的尺寸自动设置相应数值。
14.进一步地,所述相机位于晶圆的正上方,所述相机的镜头与所述晶圆的距离为
226mm至246mm。
15.进一步地,所述光源控制器的光源与所述晶圆的距离为222mm至242mm。
16.第二方面,本技术实施例提供了一种晶圆方向判定方法,所述方法包括:
17.将放有晶圆的盒体放置在黑色非反光背景台面上,并利用光源照射所述晶圆;
18.通过工控机操控相机对所述晶圆拍摄,获取晶圆的图像;
19.视觉检测通过对所述图像判断所述晶圆大切边的中垂线位置,从中垂线位置开始顺时针旋转计算与所述晶圆小切边中垂线之间的夹角角度,得到角度值;
20.根据所述角度值与预设角度值比较,若等于则判定所述晶圆为正面;
21.若不等于,则判定所述晶圆为反面。
22.进一步地,当判断出现所述角度值与预设角度值不等于的情况下,视觉检测发出报警信号。
23.进一步地,所述预设角度值根据所述晶圆的尺寸自动设置相应数值。
24.进一步地,所述相机位于晶圆的正上方,所述相机的镜头与所述晶圆的距离为226mm至246mm。
25.进一步地,所述光源与所述晶圆的距离为222mm至242mm。
26.本技术提供的一种晶圆方向判定系统及方法,通过将放有晶圆的盒体放置在黑色非反光背景台面上,并利用光源照射所述晶圆,实现最佳的照射光源,使得相机拍摄的图片更加清晰,以便后面对晶圆进行检测。通过工控机操控相机对所述晶圆拍摄,获取最佳的晶圆图像;视觉检测通过对所述图像判断所述晶圆大切边的中垂线位置,从中垂线位置开始顺时针旋转计算与所述晶圆小切边中垂线之间的夹角角度,得到角度值;根据所述角度值与预设角度值比较,若等于则判定所述晶圆为正面;若不等于,则判定所述晶圆为反面。本技术实现了对晶圆正反面的快速判定,节省了检测时间,同时能够避免因人为判别晶圆方向有误的情况,不仅提高判别晶圆方向的效率还能提高晶圆的成品良率。
附图说明
27.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
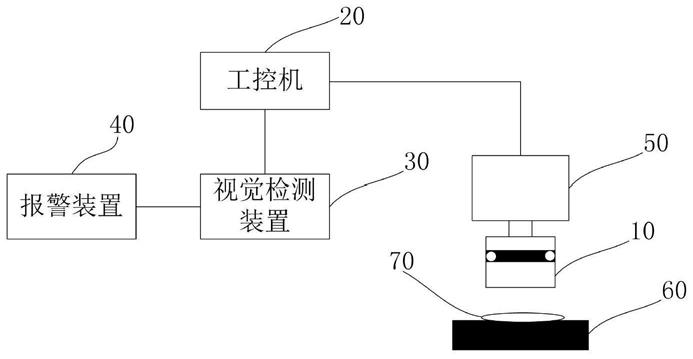
28.图1为本技术实施例提供的一种晶圆方向判定系统的结构示意图;
29.图2为本技术实施例提供的一种晶圆方向判定方法的流程示意图;
30.图3为本技术实施例提供的三英寸晶圆的检测示意图;
31.图4为本技术实施例提供的四英寸晶圆的检测示意图;
32.图5为本技术实施例提供的六英寸晶圆的检测示意图。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.目前晶圆在键合前需要进行清洗处理,然后将晶圆的正面与衬底层进行键合处理,这就需要对晶圆的正反面作出区分,如果将晶圆的反面误以为是晶圆的正面,将导致键合失败,影响工作效率以及晶圆的成品良率。为解决当晶圆生产数量过多时,通过人工区分晶圆方向,不仅增加劳动成本,而且还会出现人工区分出现错误的情况,最终导致晶圆成品良率低的问题。因此,为解决上述问题,本技术实施例提供一种晶圆方向判定系统及方法。下面结合实施例和附图对本发明技术方案进行详细说明。
35.参见图1,为本技术提供的一种晶圆方向判定系统的结构示意图;
36.由图1可知,为本技术实施例提供的一种晶圆方向判定系统,所述系统包括:光源控制器10、工控机20和视觉检测装置30;
37.所述光源控制器10用于将光源打开并照射在位于黑色非反光背景台面60上的晶圆70,使用黑色非反光背景台面60更有利于突显晶圆70,形成明显的颜色区分;若将晶圆70放在白色或其他颜色的台面上,造成晶圆70的颜色不明显或者台面背景颜色比晶圆70的颜色更加的浓重,都会影响对晶圆70的拍摄效果,只有黑色才能更好的突显晶圆70,并且能够保证晶圆70的拍摄效果。
38.所述光源控制器10的光源与所述晶圆70的最佳距离为222mm至242mm。光源控制器10是安装在相机50上用于控制光源开关的控制器,由于光源照射的距离会影响到拍摄图片的效果,因此应将光源的照射距离和角度都调整最佳的距离和范围,才能有助于拍摄晶圆70达到最佳的效果,更加有利于检测晶圆70的正反面。
39.所述工控机20与所述视觉检测装置30电连接,所述工控机20用于控制相机50对所述晶圆70进行拍摄,所述工控机20可以操控相机50,使得相机50位于晶圆70的正上方的同时将相机50调整至最佳的拍摄距离以便拍出最佳的晶圆图片,有利于所述视觉检测装置30进行检测。所述相机50位于晶圆70的正上方,所述相机50的镜头与所述晶圆70的最佳距离为226mm至246mm。所述工控机20将拍摄好的晶圆图片传输至所述视觉检测装置30。
40.当晶圆图片传输至所述视觉检测装置30时,所述视觉检测装置30将自动识别所述晶圆图片中所述晶圆70大切边的中垂线位置,从大切边的中垂线位置开始顺时针旋转计算与所述晶圆70小切边中垂线之间的夹角角度,得到角度值;
41.根据所述角度值与预设角度值比较,所述预设角度值是根据所述晶圆70的尺寸自动设置相应的角度数值。若等于则判定所述晶圆70为正面;若不等于,则判定所述晶圆70为反面。
42.针对不同的晶圆尺寸,对应不同的预设角度值,通过更加快速的完成晶圆方向的判别,不仅提高检测效率,还减轻人工劳动力,同时也提高了晶圆的生产良率。
43.所述系统还包括报警装置40,所述报警装置40与所述视觉检测装置30电连接,所述报警装置40用于在所述视觉检测装置30判断出现所述角度值与预设角度值不等于的情况下,发出报警信号。
44.通过报警的形式来提醒工人需要注意这是晶圆的反面,由于晶圆的反面不能与衬底层进行键合处理,员工因没有注意到使用的是晶圆的反面就与衬底层进行键合,这样会影响晶圆的生产良率并且也会降低工作效率。通过产生报警的形式可以有效的提醒员工,避免在生产晶圆过程中产生差错。
45.参见图2,为本技术提供的一种晶圆方向判定方法的流程图。由于上文已经详细讨
论根据本发明的实施例的晶圆方向判定系统及其操作,下面仅结合图2简单描述相应的晶圆方向判定方法的步骤,更多细节可以参考上文的讨论。
46.由图2可知,本技术还提供了一种晶圆方向判定方法,所述方法包括:
47.s1:将放有晶圆的盒体放置在黑色非反光背景台面上,并利用光源照射所述晶圆。
48.使用黑色非反光背景台面更有利于突显晶圆,形成明显的区分;若将晶圆放在白色或其他颜色的台面上,造成晶圆的颜色不突显或者背景颜色比晶圆的颜色更突显,都会影响对晶圆的拍摄效果,只有黑色才能更好的突显晶圆,并且能够保证晶圆的拍摄效果。
49.光源照射的距离会影响到拍摄图片的效果,因此应将光源的照射距离和角度都调整最佳的距离和范围,其最佳距离为222mm至242mm,才能有助于拍摄晶圆达到最佳的效果,更加有利于检测晶圆的正反面。
50.s2:通过工控机操控相机对所述晶圆拍摄,获取晶圆的图像。
51.所述工控机用于控制相机对所述晶圆进行拍摄,所述工控机可以操控相机,使得相机位于晶圆的正上方的同时将相机调整至最佳的拍摄距离以便拍出最佳的晶圆图片,有利于视觉检测进行检测。所述相机位于晶圆的正上方,所述相机的镜头与所述晶圆的最佳距离为226mm至246mm。
52.s3:视觉检测通过对所述图像判断所述晶圆大切边的中垂线位置,从中垂线位置开始顺时针旋转计算与所述晶圆小切边中垂线之间的夹角角度,得到角度值。
53.s4:根据所述角度值与预设角度值比较,若等于则判定所述晶圆为正面;若不等于,则判定所述晶圆为反面。
54.所述预设角度值取决于晶圆的尺寸,针对不同的晶圆尺寸,对应不同的预设角度值。通过更加快速的完成晶圆方向的判别,不仅提高检测效率,还减轻人工劳动力,同时也提高了晶圆的生产良率。
55.当判断出现所述角度值与预设角度值不等于的情况下,视觉检测发出报警信号。通过报警的形式来提醒工人需要注意这是晶圆的反面,由于晶圆的反面不能与衬底层进行键合处理,员工因没有注意到使用的是晶圆的反面就与衬底层进行键合,这样会影响晶圆的生产良率并且也会降低工作效率。通过产生报警的形式可以有效的提醒员工,避免在生产晶圆过程中产生差错。
56.为进一步说明本技术中的技术方案,本技术实施例进一步公开了以下具体实施例,由图3至图5所示。
57.实施例1
58.1)将放有3英寸铌酸锂晶圆的盒体放置在黑色非反光背景台面上。
59.2)通过光源控制器打开光源,使光源与晶圆的距离为222mm至242mm。
60.3)打开相机,相机镜头向下垂直对准晶圆。
61.4)通过操作工控机来控制相机的镜头与晶圆的距离控制在226mm至246mm,然后进行拍摄,将拍摄好的图片传输至视觉检测。
62.5)视觉检测自动识别晶圆大切边的中垂线位置,自大切边中垂线的位置开始顺时针计算与小切边中垂线之间的夹角角度,与在视觉检测内预先设定的夹角角度135
°
进行比较,若计算角度等于设定角度则为晶圆的正面,视觉检测不发出报警信号,若计算角度不等于设定角度则为晶圆的反面,则视觉检测发出报警信号。
63.实施例2
64.1)将放有4英寸铌酸锂晶圆的盒体放置在黑色非反光背景台面上。
65.2)通过光源控制器打开光源,使光源与晶圆的距离为222mm至242mm。
66.3)打开相机,相机镜头向下垂直对准晶圆。
67.4)通过操作工控机来控制相机的镜头与晶圆的距离控制在226mm至246mm,然后进行拍摄,将拍摄好的图片传输至视觉检测。
68.5)视觉检测自动识别晶圆大切边的中垂线位置,自大切边中垂线的位置开始顺时针计算与小切边中垂线之间的夹角角度,与在视觉检测内预先设定的夹角角度90
°
进行比较,若计算角度等于设定角度则为晶圆的正面,视觉检测不发出报警信号,若计算角度不等于设定角度则为晶圆的反面,则视觉检测发出报警信号。
69.实施例3
70.1)将放有6英寸铌酸锂晶圆的盒体放置在黑色非反光背景台面上。
71.2)通过光源控制器打开光源,使光源与晶圆的距离为222mm至242mm。
72.3)打开相机,相机镜头向下垂直对准晶圆。
73.4)通过操作工控机来控制相机的镜头与晶圆的距离控制在226mm至246mm,然后进行拍摄,将拍摄好的图片传输至视觉检测。
74.5)视觉检测自动识别晶圆大切边的中垂线位置,自大切边中垂线的位置开始顺时针计算与小切边中垂线之间的夹角角度,与在视觉检测内预先设定的夹角角度135
°
进行比较,若计算角度等于设定角度则为晶圆的正面,视觉检测不发出报警信号,若计算角度不等于设定角度则为晶圆的反面,则视觉检测发出报警信号。
75.本技术提供的一种晶圆方向判定系统及方法,通过将放有晶圆的盒体放置在黑色非反光背景台面上,并利用光源照射所述晶圆,实现最佳的照射光源,使得相机拍摄的图片更加清晰,以便后面对晶圆进行检测。通过工控机操控相机对所述晶圆拍摄,获取最佳的晶圆图像;视觉检测通过对所述图像判断所述晶圆大切边的中垂线位置,从中垂线位置开始顺时针旋转计算与所述晶圆小切边中垂线之间的夹角角度,得到角度值;根据所述角度值与预设角度值比较,若等于则判定所述晶圆为正面;若不等于,则判定所述晶圆为反面。本技术实现了对晶圆正反面的快速判定,节省了检测时间,同时能够避免因人为判别晶圆方向有误的情况,不仅提高判别晶圆方向的效率还能提高晶圆的成品良率。
76.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由所附的权利要求指出。
77.应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。