1.本发明属于拆包机领域,特别涉及一种自动翻转拆包机。
背景技术:
2.现代化生产中,生产规模不断提高,对于大型化、集约式的生产方式,单纯的人工作业已无法满足要求。为增强物料的投放速度、降低物料投放时的劳作强度,固体粉料的投放大多采用自动化设备,如拆包机。现有的拆包机一般对物料包装袋进行多次切割,以保证物料能够全部倒入出料底节内。包装袋只切割一次,一般切缝较小,物料容易在包装袋内残留。但是多次切割容易使包装袋出现碎屑,混入到物料中,造成污染。
技术实现要素:
3.本发明针对现有技术中存在的技术问题,提供一种自动翻转拆包机,在料仓内自动完成挂袋动作、倾倒动作和抛袋动作,减少物料外泄的可能性,减小投料者劳动强度,提高了工作效率,并在倾倒动作中增加了抖袋动作,确保了包装袋内不残留物料。
4.本发明采用的技术方案是:一种自动翻转拆包机,包括料仓、物料托架、转动气缸、连杆、主轴、主支架、翻转气缸和物料载具,所述料仓内固定有物料托架,所述物料托架下方设置有切割组件,所述切割组件固定于所述料仓内,所述转动气缸与所述料仓连接,所述转动气缸的活塞杆通过连杆与主轴连接,所述转动气缸用于驱动所述主轴转动,所述主支架与所述主轴固定连接,所述主支架通过翻转气缸与物料载具连接,所述物料载具上设置有挂钩组件。
5.进一步的,所述切割组件包括切割刀和两个切割气缸,所述切割刀两端分别与所述切割气缸连接,所述切割气缸与所述料仓固定连接。
6.进一步的,所述切割气缸采用直线气缸。
7.进一步的,所述挂钩组件包括挂钩气缸和一个以上的挂钩,所述挂钩均与所述挂钩气缸连接,所述挂钩气缸固定于物料载具上,所述物料载具上开设有供所述挂钩穿过的通孔。
8.进一步的,所述挂钩的数量为三个,等间距竖向排列。
9.进一步的,所述料仓内固定有导向柱,所述物料载具通过导向架与所述导向柱连接。
10.进一步的,所述导向架采用u型架。
11.进一步的,所述料仓内固定有与所述物料载具配合使用的缓冲器,所述物料载具位于所述缓冲器与物料托架之间。
12.进一步的,所述料仓上设置有机盖,所述机盖位于所述物料托架上方。所述料仓上设置有出料底节,所述出料底节位于所述物料托架下方。
13.进一步的,所述料仓外侧固定有控制盒,所述控制盒与所述切割组件、转动气缸和翻转气缸连接。
14.与现有技术相比,本发明所具有的有益效果是:本发明自动完成挂袋动作、倾倒动作和抛袋动作,减小投料者劳动强度,提高了工作效率,且上述动作均在料仓内进行,减少物料外泄的可能性。本发明在倾倒动作中增加了抖袋动作,确保了包装袋内不残留物料。本发明的切割组件从包装袋下方一次割开包装袋,方便物料的倾倒,最大程度避免物料中混入包装袋碎屑等杂质,破袋过程自动完成,省去人工使用利器的风险。
附图说明
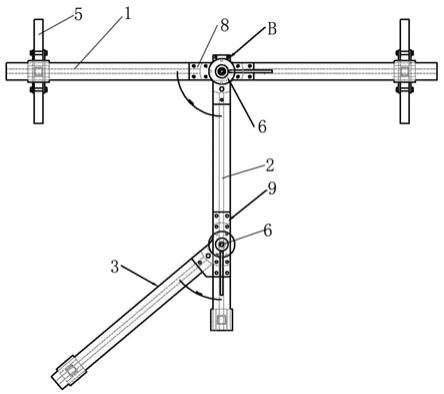
15.图1为本发明实施例的结构示意图;
16.图2为本发明实施例的另一角度的结构示意图。
17.图中1-料仓,2-机盖,3-出料底节,4-物料托架,5-转动气缸,6-连杆,7-主轴,8-主支架,9-翻转气缸,10-物料载具,11-切割刀,12-切割气缸,13-挂钩,14-挂钩气缸,15-导向柱,16-导向架,17-缓冲器,18-物料包装袋。
具体实施方式
18.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施例对本发明作详细说明。
19.本发明的实施例提供了一种自动翻转拆包机,如图1-2所示,其包括料仓1、机盖2、出料底节3、物料托架4、转动气缸5、连杆6、主轴7、主支架8、翻转气缸9、物料载具10、切割刀11、切割气缸12、挂钩13、挂钩气缸14、导向柱15、导向架16、缓冲器17。所述料仓1内固定有物料托架4。所述料仓1上设置有机盖2,所述机盖2位于所述物料托架4上方。所述料仓1上设置有出料底节3,所述出料底节3位于所述物料托架4下方。所述物料托架4和出料底节3之间设置有切割组件,所述切割组件包括切割刀11和两个切割气缸12,所述切割刀11两端分别与所述切割气缸12连接,所述切割气缸12与所述料仓1固定连接。所述切割气缸12采用直线气缸。所述料仓1的外部两侧对称设置有转动气缸5,两个所述转动气缸5的活塞杆分别通过连杆6与主轴7的两端连接,主轴7贯穿料仓1。转动气缸5与料仓1转动连接,转动气缸5的活塞杆与连杆6转动连接,连杆6与主轴7固定连接。所述转动气缸5驱动所述主轴7转动。所述主支架8的下端与所述主轴7固定连接,所述主支架8的上端通过翻转气缸9与物料载具10连接。翻转气缸9驱动物料载具10翻转。所述物料载具10的背面设置有挂钩组件。所述挂钩组件包括挂钩气缸14和三个挂钩13,所述挂钩13等间距竖向排列,所述挂钩13均与所述挂钩气缸14连接。所述挂钩气缸14固定于物料载具10上,所述物料载具10上开设有供所述挂钩13穿过的通孔。挂钩气缸14带动挂钩13转动,使挂钩13的前部穿过所述通孔,伸出至物料载具10的正面。所述料仓1的内侧壁上固定有导向柱15,所述物料载具10通过导向架16与所述导向柱15连接。所述物料载具10与导向架16固定连接。所述导向架16采用u型架,导向柱15插在u型架内。所述料仓1的两侧内侧壁上对称固定有与所述物料载具10配合使用的缓冲器17。所述物料载具10位于物料托架4和缓冲器17之间。导向架16、导向柱15和缓冲器17的设计,减少了物料载具10运动过程中出现故障的可能性。所述料仓1外侧固定有控制盒(图中未画出),所述控制盒与所述切割气缸12、转动气缸5和翻转气缸9连接。操作者可以在控制盒处进行预先设定,控制切割气缸12、转动气缸5和翻转气缸9的动作次数、时间间隔等,以实现连续自动的操作。例如挂钩13勾住物料包装袋18以后的稳定时间,切割刀11切割的速
度,物料包装袋18来回抖动的次数等。
20.使用时,工人将物料包装袋18放置在物料托架4上,再在控制盒的触摸屏上进行操作,控制转动气缸5、翻转气缸9等工作。具体为:转动气缸5的活塞杆伸长,带动主轴7转动,使主支架8的上端朝物料托架4方向移动;同时,翻转气缸9工作,使物料载具10的正面朝向物料托架4;最终使物料载具10的正面压在物料包装袋18上。挂钩气缸14工作,带动挂钩13转动,挂钩13前端穿过通孔,插入物料包装袋18内。切割气缸12工作,带动切割刀11移动,割破物料包装袋18的下部。转动气缸5的活塞杆小幅度的多次伸缩,通过连杆6、主轴7、主支架8、物料载具10带动物料包装袋18来回多次抖动,使物料包装袋18内的物料落于出料底节3内。抖动物料包装袋18可以保证物料包装袋18内的物料能够全部落于出料底节3内,物料包装袋18内不残留物料。转动气缸5的活塞杆收缩,带动主轴7转动,使主支架8的上端朝缓冲器17方向移动;同时,翻转气缸9工作,使物料载具10的正面朝向缓冲器17;最终使物料载具10的正面贴在缓冲器17上。挂钩气缸14带动挂钩13转动,挂钩13收于物料载具10的背面。物料包装袋18从物料载具10上滑落,落于料仓1外。
21.以上通过实施例对本发明进行了详细说明,但所述内容仅为本发明的示例性实施例,不能被认为用于限定本发明的实施范围。本发明的保护范围由权利要求书限定。凡利用本发明所述的技术方案,或本领域的技术人员在本发明技术方案的启发下,在本发明的实质和保护范围内,设计出类似的技术方案而达到上述技术效果的,或者对申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。