1.本实用新型属于自动化设备领域,更具体地,涉及一种用于自动化设备上的随动式开袋机构。
背景技术:
2.袋装物品在生产包装过程中,都需要先将袋子打开,再将物品放入袋子内封装。然而,随着人工成本的不断提升,越来越多的企业都采用自动化包装设备替代人工封装。
3.目前,用于封装袋装物品的自动化包装设备上都设置有开袋机构,现有的开袋机构基本都是与撑开机构一体,开袋的不良率偏高,这就容易导致后续工位在袋子没有打开的情况下就往里塞填装物,导致物料渗漏,严重时还可能导致设备故障;另外,现有的开袋机构缺少检测装置,后续工位无法判断袋子是否已经打开,需要人工观察袋子的打开情况,自动化程度偏低。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供一种用于自动化设备上的随动式开袋机构,并具体提供如下技术方案:
5.一种用于自动化设备上的随动式开袋机构,包括控制器、限位架和检测组件,所述限位架上设有第一吸附组件和第二吸附组件,所述检测组件、所述第一吸附组件和所述第二吸附组件分别与所述控制器相连,所述第一吸附组件用于吸附住袋子的一侧,所述第二吸附组件用于吸附住袋子远离所述第一吸附组件的一侧;所述检测组件分别与所述第一吸附组件和所述第二吸附组件相连,所述检测组件能够检测所述第一吸附组件和所述第二吸附组件的吸附力。
6.进一步地,所述限位架包括主固定板和联动板,所述主固定板上平行设有两条第一导轨,两条所述第一导轨上依次滑动设有第一滑动板和第二滑动板,所述联动板的两端分别与所述第一滑动板和所述第二滑动板连接;所述第一滑动板与所述第一吸附组件连接,所述第二滑动板与所述第二吸附组件连接。
7.进一步地,所述第一吸附组件包括第一气缸和第一吸附头,所述第一气缸和所述第一吸附头分别与所述控制器相连,所述第一气缸与所述第一滑动板连接,第一气缸的运动端与所述第一吸附头连接,所述第一吸附头分别与所述控制器和所述检测组件相连。
8.进一步地,所述第一吸附组件还包括第一气缸固定块、第一吸附头固定块和第一滑块,所述第一气缸固定块与所述第一滑动板连接,所述第一气缸与所述第一气缸固定块连接,第一气缸的运动端与所述第一滑块连接;所述第一吸附头与所述第一吸附头固定块连接,所述第一吸附头固定块与所述第一滑块连接,所述第一滑动板上设有第一气缸导轨,所述第一滑块与所述第一气缸导轨滑动连接。
9.进一步地,所述第二吸附组件包括第二气缸和第二吸附头,所述第二气缸和所述第二吸附头分别与所述控制器相连,所述第二气缸与所述第二滑动板连接,第二气缸的运
动端与所述第二吸附头连接,所述第二吸附头分别与所述控制器和所述检测组件相连。
10.进一步地,所述第二吸附组件还包括第二气缸固定块、第二吸附头固定块和第二滑块,所述第二气缸固定块与所述第二滑动板连接,所述第二气缸与所述第二气缸固定块连接,第二气缸的运动端与所述第二滑块连接;所述第二吸附头与所述第二吸附头固定块连接,所述第二吸附头固定块与所述第二滑块连接,所述第二滑动板上设有第二气缸导轨,所述第二滑块与所述第二气缸导轨滑动连接。
11.进一步地,所述第一吸附组件数量有两个,且两个所述第一吸附组件平行设置在所述第一滑动板上;所述第二吸附组件数量有两个,且所述第二吸附组件与所述第一吸附组件的位置关系一一对应。
12.进一步地,所述检测组件包括至少两个真空检测表,所述真空检测表分别与控制器相连,每个真空检测表分别与一个第一吸附头或一个第二吸附头相连。
13.进一步地,还包括驱动装置,所述驱动装置与所述控制器相连,所述驱动装置用于驱动所述第一吸附组件和所述第二吸附组件运动,所述驱动装置与所述第一滑动板或所述第二滑动板连接。
14.进一步地,所述驱动装置包括驱动电机和滑动丝杆模组,所述驱动电机与所述控制器相连,所述驱动电机与所述滑动丝杆模组连接,所述滑动丝杆模组上滑动设有驱动滑块,所述驱动滑块远离所述滑动丝杆模组的一端设有浮动接头,所述浮动接头远离所述驱动滑块的一端与所述第一滑动板或所述第二滑动板连接。
15.与现有技术相比,本实用新型实施例具备以下有益效果:
16.1、通过设置第一吸附组件和第二吸附组件能够稳定的吸附住待打开袋子的两侧,能够实现稳定打开袋子,提高了开袋的良品率;能够降低物料渗漏的可能性,有效地降低了设备的故障率。
17.2、检测组件能够检测出第一吸附组件和第二吸附组件的吸附力,并反馈给控制器,从而判断是否开袋成功;工作过程不需要人工参与,提升了设备的自动化程度。
附图说明
18.为了更清楚地说明本技术或现有技术中的方案,下面将对实施例或现有技术描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
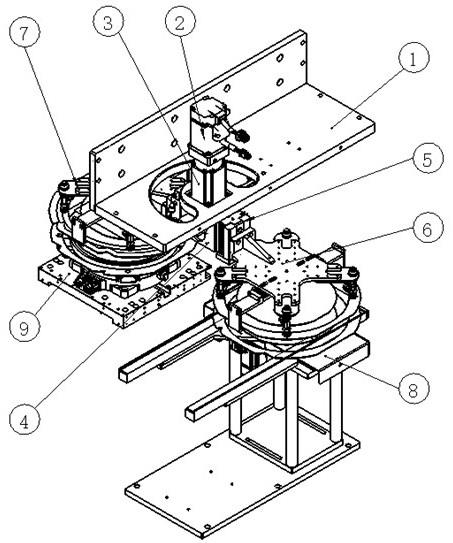
19.图1是本实用新型实施例整体结构示意图;
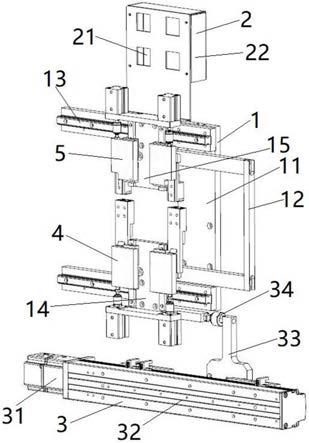
20.图2是本实用新型实施例局部结构示意图;
21.图3是本实用新型实施例另一局部结构示意图。
具体实施方式
22.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术;本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本技术的说明
书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。
23.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
24.为了使本技术领域的人员更好地理解本技术方案,下面将结合附图,对本技术实施例中的技术方案进行清楚、完整地描述。
25.如图1-3所示,本技术实施例提供一种用于自动化设备上的随动式开袋机构,包括控制器、限位架1、检测组件2和驱动装置3,限位架1上设有第一吸附组件4和第二吸附组件5,检测组件2、驱动装置3、第一吸附组件4和第二吸附组件5分别与控制器相连,第一吸附组件4用于吸附住袋子的一侧,第二吸附组件5用于吸附住袋子远离第一吸附组件4的一侧。
26.限位架1用于安装和限位该开袋机构的各个部件,保障了该开袋机构的结构稳定性。驱动装置3用于驱动第一吸附组件4和第二吸附组件5沿自动化设备的送料方向来回运动;从而将已打开的袋子移送到自动化设备上的下一个工位。工作时,控制器控制第一吸附组件4 和第二吸附组件5分别吸住袋子的两侧,之后控制器控制第一吸附组件4和第二吸附组件5分别往两个不同的方向运动,从而打开袋子;提高了开袋的成功率和准确度。
27.检测组件2分别与第一吸附组件4和第二吸附组件5相连,通过检测组件2能够检测出第一吸附组件4和第二吸附组件5的吸附力大小,并反馈给控制器;从而判断第一吸附组件4和第二吸附组件5的吸附力是否合格,进而判断出袋子是否被打开,整个过程无需人工参与,提升了设备的自动化程度。
28.限位架1包括主固定板11和联动板12,主固定板11上平行设有两条第一导轨13,第一导轨13的朝向与自动化设备的送料方向相同,两条第一导轨13上依次滑动设有第一滑动板14和第二滑动板 15,联动板12的两端分别与第一滑动板14和第二滑动板15固定连接。第一滑动板14与第一吸附组件4连接,第二滑动板15与第二吸附组件5连接。联动板12将第一滑动板14和第二滑动板15固定在一起,能够保证工作时,第一吸附组件4和第二吸附组件5同步运动,且运动方向受第一导轨13限位,与自动化设备的送料方向相同。
29.驱动装置3包括驱动电机31和滑动丝杆模组32,驱动电机31 与控制器相连,驱动电机31与滑动丝杆模组32连接,滑动丝杆模组 32上滑动设有驱动滑块33,驱动滑块33远离滑动丝杆模组32的一端设有浮动接头34,浮动接头34远离驱动滑块33的一端与第一滑动板14固定连接。在其他实施例中,浮动接头34远离驱动滑块33 的一端也可以与第二滑动板15固定连接。滑动丝杆模组32采用现有任意一种常规的丝杆模组即可,用于带动驱动滑块33运动。
30.该开袋机构安装到自动化设备上时,滑动丝杆模组32固定在自动化设备的机台上,且滑动丝杆模组32的运动方向与自动化设备的送料方向平行;工作时,控制器控制驱动电机31转动,带动驱动滑块33在滑动丝杆模组32上滑动,驱动滑块33带着第一滑动板14和第二滑动板15在第一导轨13上滑动,第一滑动板14和第二滑动板15带着第一吸附组件4和第二吸附组件5同步移动,从而将已打开的袋子移送到自动化设备的下一工位上。
31.在本实施例中,第一吸附组件4的数量有两个,且两个第一吸附组件4平行设置在
第一滑动板14上;第二吸附组件5数量有两个,且第二吸附组件5与第一吸附组件4的位置关系一一对应。该开袋机构在工作时,可以同时完成两个袋子的开袋工作,提高了开袋效率。在其他实施例中,第一吸附组件4和第二吸附组件5也可以是其他任意数量,只需保证第一吸附组件4和第二吸附组件5的位置关系一一对应即可。
32.第一吸附组件4包括第一气缸41、第一气缸固定块42、第一吸附头43、第一吸附头固定块44和第一滑块45;且第一气缸41和第一吸附头43分别与控制器相连,控制器能够控制第一气缸41运动和控制第一吸附头43吸住袋子的下表面。第一气缸固定块42固定在第一滑动板14上,第一气缸41固定在第一气缸固定块42上,第一气缸41的运动端与第一滑块45固定连接;第一气缸41的驱动方向与第一滑动板14的运动方向垂直。第一吸附头43与第一吸附头固定块 44固定连接,第一吸附头43上设有下真空吸盘46,第一吸附头固定块44与第一滑块45固定连接,第一滑动板14上设有第一气缸导轨 16,第一滑块45与第一气缸导轨16滑动连接。该开袋机构工作时,下真空吸盘46能够与袋子的下表面无缝贴合,提高开袋的成功率。
33.第二吸附组件5包括第二气缸51、第二气缸固定块52、第二吸附头53、第二吸附头固定块54和第二滑块55;且第二气缸51和第二吸附头53分别与控制器相连,控制器能够控制第二气缸51运动和控制第二吸附头53吸住袋子的上表面。第二气缸固定块52固定在第二滑动板15上,第二气缸51固定在第二气缸固定块52上,第二气缸51的运动端与第二滑块55固定连接;第二气缸51的驱动方向与第二滑动板15的运动方向垂直。第二吸附头53与第二吸附头固定块 54固定连接,第二吸附头53上设有上真空吸盘56,第二吸附头固定块54与第二滑块55固定连接,第二滑动板15上设有第二气缸导轨 17,第二滑块55与第二气缸导轨17滑动连接。该开袋机构工作时,上真空吸盘56能够与袋子的上表面无缝贴合,提高开袋的成功率。
34.检测组件2包括两个以上的真空检测表21,且真空检测表21的数量与第一吸附头43和第二吸附头53数量的总和相同。在本实施例中,真空检测表21共计有四个,每个真空检测表21分别与控制器相连,每个真空检测表21分别与一个第一吸附头43或一个第二吸附头 53相连,用于检测对应吸附头上的真空度。真空检测表21分别限位固定在检测表支架22上,检测表支架22固定在主固定板11上。工作时,真空检测表21能够检测出与之相连的第一吸附头43或第二吸附头53的真空度,进而判断吸附力是否合格,当出现不合格的情况时,真空检测表21会将信息反馈给控制器,控制器控制自动化设备作出相应处置。
35.工作原理:该开袋机构安装到自动化设备上工作时,当自动化设备的送料机构将袋子送到第一吸附头43与第二吸附头53之间的合适位置时;控制器控制第一气缸41和第二气缸往51相向方向运动,分别带动第一滑块45和第二滑块55相向运动;从而驱动第一吸附头固定块44和第二吸附头固定块54往相向的方向运动,使得第一吸附头 43上的下真空吸盘46和第二吸附头53上的上真空吸盘56分别吸附住袋子的下表面和上表面。接着控制器控制第一气缸41和第二气缸 51复位,带动第一吸附头43和第二吸附头53复位,使得袋子的上表面和下表面分离,完成开袋的整个过程。开袋完成后,控制器控制驱动电机31工作,带动驱动滑块33在滑动丝杆模组32上滑动,驱动滑块33带着第一滑动板14和第二滑动板15在第一导轨13上滑动,第一滑动板14和第二滑动板15带着第一吸附组件4和第二吸附组件 5同步移动,从而将已打开的袋子移送到自动化设备的下一工位上。
36.显然,以上所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例,附图中给出了本技术的较佳实施例,但并不限制本技术的专利范围。本技术可以以许多不同的形式来实现,相反地,提供这些实施例的目的是使对本技术的公开内容的理解更加透彻全面。尽管参照前述实施例对本技术进行了详细的说明,对于本领域的技术人员来而言,其依然可以对前述各具体实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等效替换。凡是利用本技术说明书及附图内容所做的等效结构,直接或间接运用在其他相关的技术领域,均同理在本技术专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。