1.本实用新型涉及晶圆切割技术领域,具体涉及一种晶圆切割机用上料机构。
背景技术:
2.在晶圆加工的过程中,从料仓取出晶圆后,需要先进行定位,之后再将其移动至工作位处。
3.在取料的过程中,通常利用工装将产品吸附住,然后拉升产品的高度,再由伺服丝杆导轨轴将产品从加工位移动至待料位;完成对产品的加工并取走产品后,便需要更换晶圆,即再次由工装将晶圆吸附住,然后拉升晶圆高度再由伺服丝杆导轨轴将晶圆从待料位移动至加工位,之后再次启动设备对晶圆进行加工。整个流程动作流程繁琐,且交互效率低。
技术实现要素:
4.有鉴于此,本实用新型针对现有技术的不足,提供一种晶圆切割机用上料机构,不仅能够完成对晶圆的上料过程和产品的下料过程,而且还能克服动作流程繁琐、交互效率低的缺陷。
5.为解决上述技术问题,本实用新型采用的技术方案是:一种晶圆切割机用上料机构,包括安装座、伺服电机、减速器、交叉臂、气缸、上料吸盘、下料吸盘、待料位和工作位;
6.所述减速器固定在安装座上,所述伺服电机设置在所述减速器的输入侧,所述交叉臂设置在所述减速器的输出侧,所述伺服电机带动所述交叉臂旋转运动,所述上料吸盘和所述下料吸盘通过两组所述的气缸和所述交叉臂连接在一起,所述气缸带动所述上料吸盘和所述下料吸盘进行升降运动,从而完成晶圆的上下料运动;
7.所述气缸固定在所述交叉臂的两端,从而将所述上料吸盘与所述下料吸盘连接在一起,所述待料位为晶圆抓取位置,所述工作位为晶圆切割位置。
8.进一步的,所述伺服电机通过螺栓设置在所述减速器的输入侧。
9.进一步的,所述交叉臂通过螺栓设置在所述减速器的输出侧。
10.进一步的,所述上料吸盘为真空吸盘。
11.进一步的,所述下料吸盘为真空吸盘。
12.进一步的,所述气缸控制取料机构升降。
13.进一步的,所述伺服电机配合减速器带动取料机构旋转。
14.与现有技术相比,本实用新型的有益效果在于:整体结构通过一组伺服电机和减速器进行驱动,使得上料吸盘、下料吸盘分别从待料位和工作位,同时进行抓取、旋转移位、下放晶圆等操作,且具备结构紧凑、维护容易、运行效率高的特点。
附图说明
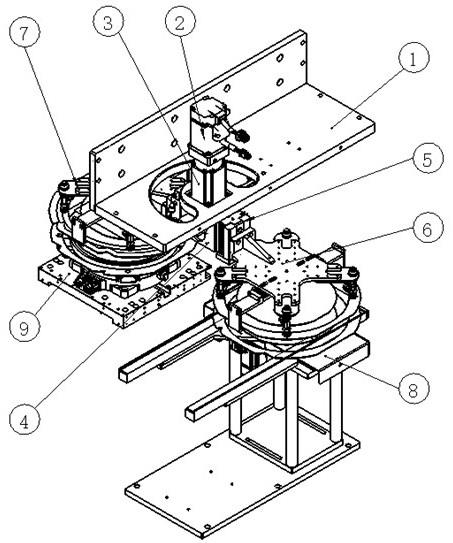
15.图1为本实用新型的整体结构示意图;
16.图2为本实用新型的侧视结构示意图;
17.图3为本实用新型的交叉臂、气缸的局部放大结构示意图。
18.图中:1、安装座;2、伺服电机;3、减速器;4、交叉臂;5、气缸;6、上料吸盘;7、下料吸盘;8、待料位;9、工作位。
具体实施方式
19.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.如图1-3所示,一种晶圆切割机用上料机构,包括安装座1、伺服电机2、减速器3、交叉臂4、气缸5、上料吸盘6、下料吸盘7、待料位8和工作位9;
21.所述减速器3固定在安装座1上,所述伺服电机2设置在所述减速器3的输入侧,所述交叉臂4设置在所述减速器3的输出侧,所述伺服电机2带动所述交叉臂4旋转运动,所述上料吸盘6和所述下料吸盘7通过两组所述的气缸5和所述交叉臂4连接在一起,所述气缸5带动所述上料吸盘6和所述下料吸盘7进行升降运动,从而完成晶圆的上下料运动;
22.所述气缸5固定在所述交叉臂4的两端,从而将所述上料吸盘6与所述下料吸盘7连接在一起,所述待料位8为晶圆抓取位置,所述工作位9为晶圆切割位置。
23.所述伺服电机2通过螺栓设置在所述减速器3的输入侧。
24.所述交叉臂4通过螺栓设置在所述减速器3的输出侧。
25.所述上料吸盘6为真空吸盘。
26.所述下料吸盘7为真空吸盘。
27.所述气缸5控制取料机构升降。
28.所述伺服电机2配合减速器3带动取料机构旋转。
29.与现有技术相比,本实用新型的有益效果在于:整体结构通过一组伺服电机2和减速器3进行驱动,使得上料吸盘6、下料吸盘7分别从待料位8和工作位9,同时进行抓取、旋转移位、下放晶圆等操作,且具备结构紧凑、维护容易、运行效率高的特点。
30.具体的,减速器3固定在安装座1上,伺服电机2通过螺栓固定在减速器3动力侧,为整套系统提供旋转运动,交叉臂4连接至减速器3的从动侧,气缸5固定在交叉臂4的两端连接上料吸盘6和下料吸盘7并提供升降运动完成取料动作,上料吸盘6从待料位8抓晶圆放至工作位9,下料吸盘7从工作位9b抓取加工完成的晶圆放至待料位8,从而完成一个加工流程。
31.动作流程:旋转机构先回初始位,然后旋转至程序设定位置,一个气缸5带动上料吸盘6下降从待料位8抓取晶圆并上升,同时另一个气缸5带动下料吸盘7下降放至工作位9抓取产品并上升,电机旋转交换上料吸盘6和下料吸盘7位置将产品和代加工晶圆更换位置,气缸5下降将将产品和晶圆放到指定位置,完成上下料动作。
32.整体结构通过一组伺服电机2和减速器3进行驱动,使得上料吸盘6、下料吸盘7分别从待料位8和工作位9,同时进行抓取、旋转移位、下放晶圆等操作,且具备结构紧凑、维护
容易、运行效率高的特点。
33.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种晶圆切割机用上料机构,其特征在于:包括安装座(1)、伺服电机(2)、减速器(3)、交叉臂(4)、气缸(5)、上料吸盘(6)、下料吸盘(7)、待料位(8)和工作位(9);所述减速器(3)固定在安装座(1)上,所述伺服电机(2)设置在所述减速器(3)的输入侧,所述交叉臂(4)设置在所述减速器(3)的输出侧,所述伺服电机(2)带动所述交叉臂(4)旋转运动,所述上料吸盘(6)和所述下料吸盘(7)通过两组所述的气缸(5)和所述交叉臂(4)连接在一起,所述气缸(5)带动所述上料吸盘(6)和所述下料吸盘(7)进行升降运动,从而完成晶圆的上下料运动;所述气缸(5)固定在所述交叉臂(4)的两端,从而将所述上料吸盘(6)与所述下料吸盘(7)连接在一起,所述待料位(8)为晶圆抓取位置,所述工作位(9)为晶圆切割位置。2.如权利要求1所述的晶圆切割机用上料机构,其特征在于:所述伺服电机(2)通过螺栓设置在所述减速器(3)的输入侧。3.如权利要求2所述的晶圆切割机用上料机构,其特征在于:所述交叉臂(4)通过螺栓设置在所述减速器(3)的输出侧。4.如权利要求3所述的晶圆切割机用上料机构,其特征在于:所述上料吸盘(6)为真空吸盘。5.如权利要求4所述的晶圆切割机用上料机构,其特征在于:所述下料吸盘(7)为真空吸盘。6.如权利要求5所述的晶圆切割机用上料机构,其特征在于:所述气缸(5)控制取料机构升降。7.如权利要求6所述的晶圆切割机用上料机构,其特征在于:所述伺服电机(2)配合减速器(3)带动取料机构旋转。
技术总结
本实用新型提供一种晶圆切割机用上料机构,包括安装座、伺服电机、减速器、交叉臂、气缸、上料吸盘、下料吸盘、待料位和工作位;减速器固定在安装座上,伺服电机设置在减速器的输入侧,交叉臂设置在减速器的输出侧,伺服电机带动交叉臂旋转运动,上料吸盘和下料吸盘通过两组所述的气缸和交叉臂连接在一起,气缸带动上料吸盘和下料吸盘进行升降运动,从而完成晶圆的上下料运动;气缸固定在所述交叉臂的两端,从而将上料吸盘与下料吸盘连接在一起,所述待料位为晶圆抓取位置,所述工作位为晶圆切割位置。通过本实用新型所述的晶圆切割机用上料机构,不仅能够完成对晶圆的上料过程和产品的下料过程,而且还能克服动作流程繁琐、交互效率低的缺陷。效率低的缺陷。效率低的缺陷。
技术研发人员:陶为银 巩铁建 蔡正道 乔赛赛
受保护的技术使用者:河南通用智能装备有限公司
技术研发日:2021.09.02
技术公布日:2022/4/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。