1.本发明涉及喷漆设备技术领域,具体是一种工业机器人制造用喷漆设备。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.工业机器人需要多种零件组装形成,零件在加工完成之后,防止零件的表面被腐蚀,需要对零部件的表面以及内部进行喷漆处理,能够延长零件的使用寿命。
4.现有的工业机器人制造用喷漆设备存在无法多角度调节喷漆阀的问题,导致喷涂效果差和喷涂效率低。
技术实现要素:
5.本发明实施例的目的在于提供一种工业机器人制造用喷漆设备,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种工业机器人制造用喷漆设备,包括承载机构和喷涂组件,还包括:位于承载机构上的旋转机构,所述喷涂组件安装在旋转机构上;以及位于承载机构上的升降机构,所述升降机构内设置有活动套设在旋转机构上的活动杆;位于活动杆与喷涂组件之间的联动组件。
7.作为本发明进一步的方案:所述喷涂组件包括喷阀、转轴、第一轴承、伸缩杆、套管、凸块、弹性管、泵体和漆料箱,所述伸缩杆的一端连接有第一轴承,所述第一轴承内安装有转轴,所述转轴设计为中空结构,所述喷阀安装在转轴上远离伸缩杆的一端,所述转轴上连接有套管,所述套管与转轴连通,所述套管通过弹性管连接泵体的出液端,所述泵体的进液端连接漆料箱,所述套管侧壁连接有凸块。
8.作为本发明再进一步的方案:所述旋转机构包括转动管、传动齿轮、第二驱动部和转动盘,所述转动管内壁开设有沿着轴线方向延伸的限位槽,所述活动杆活动套设于转动管内,且活动杆表面连接有与限位槽插合连接的限位筋,所述转动管上连接有传动齿轮和转动盘,所述第二驱动部包括第二驱动马达和第二驱动齿轮,所述第二驱动马达通过第二驱动齿轮连接传动齿轮,所述漆料箱安装在转动盘上,所述伸缩杆的另一端连接在转动管上。
9.作为本发明再进一步的方案:所述升降机构包括第一驱动部、齿条板、安装板和固定板,所述第一驱动部包括第一驱动马达和第一驱动齿轮,所述第一驱动马达通过第一驱动齿轮连接齿条板,所述齿条板上安装有安装板,所述活动杆的一端安装在安装板上,所述
固定板安装在活动杆的另一端。
10.作为本发明再进一步的方案:所述联动组件包括第一万向节、连杆和第二万向节,所述第一万向节安装在固定板上,所述第二万向节安装在凸块上,所述连杆连接在第一万向节和第二万向节之间。
11.作为本发明再进一步的方案:所述承载机构包括固定架和移动轮组,所述移动轮组安装在固定架上,所述转动管转动连接在固定架上。
12.作为本发明再进一步的方案:所述升降机构还包括固定杆和弹簧,所述固定杆固定连接在固定架上,所述齿条板活动套设在固定杆上,所述齿条板与固定架之间连接有弹簧,所述弹簧套设在固定杆上。
13.作为本发明再进一步的方案:所述转动盘表面设置有若干个滚珠,所述若干个滚珠滚动连接在固定架表面。
14.与现有技术相比,本发明的有益效果是:旋转机构和升降机构之间的相互配合,既能够带动活动杆做旋转运动,又能够带动活动杆做升降运动,活动杆通过联动组件既能够带动喷涂组件做围绕旋转机构的轴线的旋转运动,又能够做围绕自身的轴线的旋转运动,实现了不断调节喷涂组件在两个方向上的角度的功能,从而使喷涂组件能够更加均匀和快速的对工业机器人表面进行喷涂,提高了喷涂效果和喷涂效率,解决了现有的工业机器人制造用喷漆设备存在喷涂效果差的问题。
附图说明
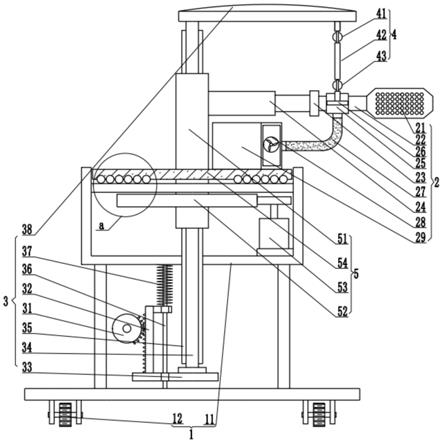
15.图1为本发明实施例一种工业机器人制造用喷漆设备的结构示意图。
16.图2为本发明中喷涂组件的立体图。
17.图3本发明图1中a的局部放大图。
18.图中:1-承载机构、11-固定架、12-移动轮组、2-喷涂组件、21-喷阀、22-转轴、23-第一轴承、24-伸缩杆、25-套管、26-凸块、27-弹性管、28-泵体、29-漆料箱、3-升降机构、31-第一驱动部、32-齿条板、33-安装板、34-活动杆、35-限位筋、36-固定杆、37-弹簧、38-固定板、4-联动组件、41-第一万向节、42-连杆、43-第二万向节、5-旋转机构、51-转动管、52-传动齿轮、53-第二驱动部、54-转动盘、541-滚珠。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
20.请参阅图1至图3,本实施例提供了一种工业机器人制造用喷漆设备,包括承载机构1和喷涂组件2,还包括:位于承载机构1上的旋转机构5,所述喷涂组件2安装在旋转机构5上;以及位于承载机构1上的升降机构3,所述升降机构3内设置有活动套设在旋转机构5上
的活动杆34;位于活动杆34与喷涂组件2之间的联动组件4。
21.进一步的,所述承载机构1包括固定架11和移动轮组12,所述移动轮组12安装在固定架11上,所述转动管51转动连接在固定架11上,具备便于移动的特点。
22.以上技术方案中,旋转机构5和升降机构3之间的相互配合,既能够带动活动杆34做旋转运动,又能够带动活动杆34做升降运动,活动杆34通过联动组件4既能够带动喷涂组件2做围绕旋转机构5的轴线的旋转运动,又能够做围绕自身的轴线的旋转运动,实现了不断调节喷涂组件2在两个方向上的角度的功能,从而使喷涂组件2能够更加均匀和快速的对工业机器人表面进行喷涂,提高了喷涂效果和喷涂效率,解决了现有的工业机器人制造用喷漆设备存在喷涂效果差的问题。
23.请参阅图1至图3,作为本发明一种实施例,所述喷涂组件2包括喷阀21、转轴22、第一轴承23、伸缩杆24、套管25、凸块26、弹性管27、泵体28和漆料箱29,所述伸缩杆24的一端连接有第一轴承23,所述第一轴承23内安装有转轴22,所述转轴22设计为中空结构,所述喷阀21安装在转轴22上远离伸缩杆24的一端,所述转轴22上连接有套管25,所述套管25与转轴22连通,所述套管25通过弹性管27连接泵体28的出液端,所述泵体28的进液端连接漆料箱29,所述套管25侧壁连接有凸块26。
24.以上技术方案中,伸缩杆24设计为电动伸缩杆或液压伸缩杆,能够调节喷阀21的径向距离,从而扩大了喷阀21的喷洒半径,进一步提高了喷漆效率,活动杆34通过联动组件4将力传递给凸块26,由于该力偏离于套管25的中心位置,因此就能够带动套管25和转轴22在第一轴承23内旋转。
25.请参阅图1至图3,,作为本发明一种实施例,所述旋转机构5包括转动管51、传动齿轮52、第二驱动部53和转动盘54,所述转动管51内壁开设有沿着轴线方向延伸的限位槽,所述活动杆34活动套设于转动管51内,且活动杆34表面连接有与限位槽插合连接的限位筋35,所述转动管51上连接有传动齿轮52和转动盘54,所述第二驱动部53包括第二驱动马达和第二驱动齿轮,所述第二驱动马达通过第二驱动齿轮连接传动齿轮52,所述漆料箱29安装在转动盘54上,所述伸缩杆24的另一端连接在转动管51上,所述转动盘54表面设置有若干个滚珠541,所述若干个滚珠541滚动连接在固定架11表面。
26.以上技术方案中,第二驱动部53能够同时带动转动管51和活动杆34旋转。
27.请参阅图1至图3,作为本发明一种实施例,所述升降机构3包括第一驱动部31、齿条板32、安装板33和固定板38,所述第一驱动部31包括第一驱动马达和第一驱动齿轮,所述第一驱动马达通过第一驱动齿轮连接齿条板32,所述齿条板32上安装有安装板33,所述活动杆34的一端安装在安装板33上,所述固定板38安装在活动杆34的另一端,所述升降机构3还包括固定杆36和弹簧37,所述固定杆36固定连接在固定架11上,所述齿条板32活动套设在固定杆36上,所述齿条板32与固定架11之间连接有弹簧37,所述弹簧37套设在固定杆36上。
28.以上技术方案中,第一驱动部31通过齿条板32带动活动杆34做升降运动。
29.请参阅图1至图3,作为本发明一种实施例,所述联动组件4包括第一万向节41、连杆42和第二万向节43,所述第一万向节41安装在固定板38上,所述第二万向节43安装在凸块26上,所述连杆42连接在第一万向节41和第二万向节43之间。
30.以上技术方案中,第一万向节41、连杆42和第二万向节43之间的相互配合,既能够起到传递立的作用,又能够根据活动杆34的高度和角度变化而发生形变,具备灵活性好的特点。
31.本发明使用时,第二驱动部53能够同时带动转动管51和活动杆34旋转,第一驱动部31通过齿条板32带动活动杆34做升降运动,第一万向节41、连杆42和第二万向节43之间的相互配合,既能够起到传递立的作用,又能够根据活动杆34的高度和角度变化而发生形变,旋转机构5和升降机构3之间的相互配合,既能够带动活动杆34做旋转运动,又能够带动活动杆34做升降运动,活动杆34通过联动组件4既能够带动喷涂组件2做围绕旋转机构5的轴线的旋转运动,又能够做围绕自身的轴线的旋转运动,实现了不断调节喷涂组件2在两个方向上的角度的功能。
32.综上所述,旋转机构5和升降机构3之间的相互配合,既能够带动活动杆34做旋转运动,又能够带动活动杆34做升降运动,活动杆34通过联动组件4既能够带动喷涂组件2做围绕旋转机构5的轴线的旋转运动,又能够做围绕自身的轴线的旋转运动,实现了不断调节喷涂组件2在两个方向上的角度的功能,从而使喷涂组件2能够更加均匀和快速的对工业机器人表面进行喷涂,提高了喷涂效果和喷涂效率,解决了现有的工业机器人制造用喷漆设备存在喷涂效果差的问题。
33.需要特别说明的是,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式,以上所述实施例仅表达了本技术方案的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术方案专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变性、改进及替代,这些都属于本技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。