技术特征:
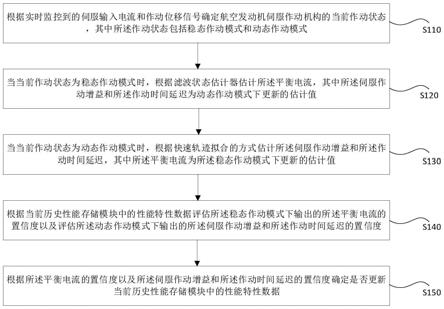
1.一种航空发动机伺服控制系统组合状态自适应估计方法,其特征在于,用于实现伺服特性参数的估计,所述伺服特性参数包括伺服作动增益、平衡电流和作动时间延迟,所述方法包括:根据实时监控到的伺服输入电流和作动位移信号确定航空发动机伺服作动机构的当前作动状态,其中所述作动状态包括稳态作动模式和动态作动模式;当当前作动状态为稳态作动模式时,根据滤波状态估计器估计所述平衡电流,其中所述伺服作动增益和所述作动时间延迟为动态作动模式下更新的估计值;当当前作动状态为动态作动模式时,根据快速轨迹拟合的方式估计所述伺服作动增益和所述作动时间延迟,其中所述平衡电流为所述稳态作动模式下更新的估计值;根据当前历史性能存储模块中的性能特性数据评估所述稳态作动模式下输出的所述平衡电流的置信度以及评估所述动态作动模式下输出的所述伺服作动增益和所述作动时间延迟的置信度;根据所述平衡电流的置信度以及所述伺服作动增益和所述作动时间延迟的置信度确定是否更新当前历史性能存储模块中的性能特性数据。2.根据权利要求1所述的方法,其特征在于,所述根据实时监控到的伺服输入电流和作动位移信号确定航空发动机伺服作动机构的当前作动状态,包括:实时监控伺服输入电流和作动位移信号;根据所述作动位移信号的累计阈值确定稳态模式判定条件和动态模式判定条件;若航空发动机伺服作动机构的当前作动状态满足稳态模式判定条件,则确定当前作动状态为稳态作动模式;若航空发动机伺服作动机构的当前作动状态满足动态模式判定条件,则确定当前作动状态为动态作动模式。3.根据权利要求2所述的方法,其特征在于,所述根据所述作动位移信号的累计阈值确定稳态模式判定条件和动态模式判定条件,包括:统计航空发动机伺服作动机构在稳态作动模式下的作动位移信号的测量噪声,并用信号标准差σ
z,0
表示,计算最近m
z
个采用周期内作动位移信号的标准差σ
z
;将所述标准差σ
z
与准稳态阈值λ
s
σ
z,0
进行比较,当σ
z
<λ
s
σ
z,0
时确定航空发动机伺服作动机构的当前作动状态处于稳态作动模式;将所述标准差σ
z
与动态阈值λ
d
σ
z,0
进行比较,当σ
z
>λ
d
σ
z,0
时确定航空发动机伺服作动机构的当前作动状态处于动态作动模式;其中,m
z
,λ
s
,λ
d
均表示常数,且λ
s
<λ
d
。4.根据权利要求1所述的方法,其特征在于,所述当当前作动状态为稳态作动模式时,根据滤波状态估计器估计所述平衡电流,包括:建立伺服作动机构非线性模型;根据对称采样算法设计用于估计所述平衡电流的ukf滤波器;将所述ukf滤波器应用至所述伺服作动机构非线性模型,以实现估计所述平衡电流。5.根据权利要求4所述的方法,其特征在于,所述将所述ukf滤波器应用至所述伺服作动机构非线性模型,包括:滤波器运动模型载入伺服作动增益k
v
和作动时间延迟t
delay
,并确定待估计的平衡电流
的初始值i
bal,0
;计算sigma点并确定权重:并确定权重:并确定权重:并确定权重:并确定权重:并确定权重:其中,λ,α,β均表示调整因子,表示矩阵(1 λ)p
x
的平方根矩阵的第i行或第i列;时间更新:时间更新:时间更新:时间更新:测量更新,根据当前时刻测量值y
k
对预测状态和估计误差协方差进行修正:进行修正:进行修正:进行修正:进行修正:进行修正:对待估计的平衡电流的估计值进行收敛性判断,当待估计的平衡电流的估计值满足收敛条件时,输出待估计的平衡电流的估计值,其中ε表示设置的平衡电流估计收敛阈值;返回更新待估计的平衡电流的初始值,重复上述步骤。6.根据权利要求5所述的方法,其特征在于,所述当当前作动状态为稳态作动模式时,
根据滤波状态估计器估计所述平衡电流,还包括:当输出的平衡电流的估计值趋近收敛后,将所述平衡电流的估计值分别传递至动态参数估计模块、置信度评估模块和历史性能存储模块。7.根据权利要求1所述的方法,其特征在于,所述当当前作动状态为动态作动模式时,所述根据快速轨迹拟合的方式估计所述伺服作动增益和所述作动时间延迟,包括:初始化,并载入平衡电流i
bal
,设置2m 1个bfgs优化器的伺服作动增益初始值k
v,0
和作动时间延迟初始值t
delay,0
;进行bfgs优化,其中2m 1个bfgs优化器各自进行一次拟牛顿迭代优化,获取2m 1个损失函数f
i
(x
k
),i=1
……
2m 1;通过最小损失函数选择器获取f
i
(x
k
)中最小损失函数f
min
(x
k
)对应的bfgs优化器的伺服作动增益预测值和梯度信息f
′
(x
k
),传递给每组bfgs优化器作为更新初值;通过最小损失函数选择器获取f
i
(x
k
)中最小损失函数对应的bfgs优化器的伺服作动延时预测值以此更新每组bfgs优化器的时间延迟设置[t
delay,k 1-m,
…
,t
delay,k 1
,
…
,t
delay,k 1
m],其中t
delay,k 1
的更新公式为:其中,δt
max
和δt
min
分别表示单次延迟周期更新的最大限制和最小限制,t
max
和t
min
分别表示作动延迟周期估计值的最大限制和最小限制;优化收敛与结束判断,其中判断条件为:(a)最小损失函数f
min
(x
k
)满足收敛条件|f
min
(x
k
)-f
min
(x
k-1
)|<ε
f
,(b)优化估计参数满足收敛条件:(c)优化估计参数满足收敛条件:若同时满足(a)、(b)和(c)所示的收敛条件,且迭代次数k<k
max
,则结束迭代优化计算并输出作为本次伺服作动增益的估计值以及输出作为本次作动时间延迟的估计值;若k>k
max
则结束迭代优化计算且不输出估计值;其他情况均返回初始化后重新迭代计算。8.根据权利要求7所述的方法,其特征在于,还包括:将满足收敛条件的伺服作动增益的估计值和作动时间延迟的估计值分别传递至稳态参数估计模块、置信度评估模块和历史性能存储模块。9.根据权利要求1所述的方法,其特征在于,所述根据当前历史性能存储模块中的性能特性数据评估所述稳态作动模式下输出的所述平衡电流的置信度以及评估所述动态作动模式下输出的所述伺服作动增益和所述作动时间延迟的置信度,包括:
分别构造平衡电流趋势阈值范围伺服作动增益趋势阈值范围和作动时间延迟趋势阈值范围其中,其中,分别表示伺服系统在相同工况下进行多次辨识记录结果的均值,为基于工程经验设计的阈值偏差;将估计得到的平衡电流的估计值与所述平衡电流趋势阈值范围进行比较,将估计得到的伺服作动增益的估计值与所述伺服作动增益趋势阈值范围进行比较,以及将估计得到的作动时间延迟的估计值与作动时间延迟趋势阈值范围进行比较;若平衡电流的估计值在所述平衡电流趋势阈值范围内,则确定平衡电流的估计值具有高置信度,若伺服作动增益的估计值在所述伺服作动增益趋势阈值范围内,则确定伺服作动增益具有高置信度,若作动时间延迟的估计值在所述作动时间延迟趋势阈值范围内,则确定作动时间延迟具有高置信度。10.根据权利要求9所述的方法,其特征在于,所述根据所述平衡电流的置信度以及所述伺服作动增益和所述作动时间延迟的置信度确定是否更新当前历史性能存储模块中的性能特性数据,包括:将具有高置信度的所述平衡电流、所述伺服作动增益和所述作动时间延迟均更新至所述历史性能存储模块中。
技术总结
本发明涉及航空发动机伺服系统技术领域,具体公开了一种航空发动机伺服控制系统组合状态自适应估计方法,其中,包括:根据实时监控到的伺服输入电流和作动位移信号确定航空发动机伺服作动机构的当前作动状态;当当前作动状态为稳态作动模式时,根据滤波状态估计器估计平衡电流;当当前作动状态为动态作动模式时,根据快速轨迹拟合的方式估计伺服作动增益和作动时间延迟;根据当前历史性能存储模块中的性能特性数据评估稳态作动模式下输出的平衡电流的置信度以及评估动态作动模式下输出的伺服作动增益和作动时间延迟的置信度。本发明提供的航空发动机伺服控制系统组合状态自适应估计方法能够提高发动机控制安全性。适应估计方法能够提高发动机控制安全性。适应估计方法能够提高发动机控制安全性。
技术研发人员:王元 季春生 卢俊杰
受保护的技术使用者:中国航发控制系统研究所
技术研发日:2021.12.07
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。