技术特征:
1.一种轨道交通智能装卸系统,其特征在于,包括:站台输送系统,设置在站台上、用于输送轨道车辆的集装器;所述轨道车辆,所述轨道车辆包括:车门处输送系统,与所述站台输送系统对接、用于输送集装器;货架系统,用于对集装器进行存储;堆垛系统,用于对所述车门处输送系统或所述货架系统上的集装器进行抓取和扫描,并将扫描集装器得到的集装器信息发送至总控系统;所述总控系统,用于根据接收到的车门启动信号控制所述车门处输送系统和所述站台输送系统对接;用于根据所述集装器信息控制所述堆垛系统动作、对所述集装器进行取放。2.根据权利要求1所述的一种轨道交通智能装卸系统,其特征在于,所述堆垛系统具体用于对所述车门处输送系统的待入库的集装器进行抓取和扫描,得到待入库的集装器的集装器信息;用于根据分配的堆垛位将所述待入库的集装器移送至所述货架系统上进行存储;所述总控系统还用于根据所述集装器信息为所述待入库的集装器分配堆垛位,并将所述集装器与其分配的堆垛位进行绑定并存储。3.根据权利要求2所述的一种轨道交通智能装卸系统,其特征在于,所述货架系统包括:堆垛位状态检测装置,与所述总控系统连接,所述堆垛位状态检测装置用于检测到集装器入库时,发送集装器到位指令至所述总控系统;所述总控系统还用于接收到堆垛位的集装器到位指令后,更新堆垛位列表信息,所述堆垛位列表信息包括所述集装器与其对应的堆垛位的绑定关系。4.根据权利要求3所述的一种轨道交通智能装卸系统,其特征在于,所述堆垛系统包括堆垛机,所述堆垛机包括:堆垛机机架;货叉,位于所述堆垛机机架上,所述货叉用于对集装器进行取放;堆垛机行走驱动装置,位于所述堆垛机机架上,用以带动所述堆垛机在轨道车辆内行走;控制装置,用于与所述总控系统连接,且所述控制装置分别与所述货叉和所述堆垛机行走驱动装置连接,所述控制装置用于控制所述堆垛机行走驱动装置行走至与所述货架系统的对应位置处,并控制所述货叉动作、对集装器进行取放。5.根据权利要求4所述的一种轨道交通智能装卸系统,其特征在于,所述堆垛系统还包括:扫码装置,固定于所述堆垛机机架上,所述扫码装置用于对集装器进行扫码,并将集装器信息发送至所述控制装置。6.根据权利要求5所述的一种轨道交通智能装卸系统,其特征在于,所述总控系统还用于:当接收到出库指令时,根据预到站的到站信息确定预出库的集装器;并根据所述预出库的集装器以及所述堆垛位列表信息,确定堆垛位的位置,并控制所述堆垛系统根据所述堆垛位的位置取出对应的所述预出库的集装器。
7.根据权利要求6所述的一种轨道交通智能装卸系统,其特征在于,所述总控系统还用于:根据所述扫码装置当前扫描得到的集装器信息进行判断,当所述堆垛系统当前抓取的集装器为所述预出库的集装器时,解除所述预出库的集装器和与其对应的堆垛位的绑定关系,并更新所述堆垛位列表信息。8.根据权利要求7所述的一种轨道交通智能装卸系统,其特征在于,所述总控系统还用于:在更新所述堆垛位列表信息后,根据所述堆垛位列表信息计算闲置的堆垛位的数量,并根据所述闲置的堆垛位的数量得到堆垛位警戒数;获取预到站的待入库的集装器的数量;当所述预到站的待入库的集装器的数量大于所述堆垛位警戒数时,进行报警。9.根据权利要求2所述的一种轨道交通智能装卸系统,其特征在于,所述总控系统具体用于:根据所述集装器信息读取集装器所装载的货物的货物站位信息;根据所述货物站位信息确定所装载的货物的旅途类型,通过所述旅途类别确定与所述待入库的集装器对应的存储区域,及所述存储区域中、所述待入库的集装器对应的堆垛位。10.根据权利要求9所述的一种轨道交通智能装卸系统,其特征在于,所述总控系统具体用于:根据所述货物站位信息确定所装载的货物的货物到站信息;根据预设列车时刻表、获取的当前站台信息和所述货物到站信息进行判断,当货物到站和当前站台间的停靠站数大于或等于预设停靠站数时,认为所装载的货物的旅途类型为长途类型;当货物到站和当前站台间的停靠站数小于所述预设停靠站数时,认为所装载的货物的旅途类型为短途类型。11.根据权利要求10所述的一种轨道交通智能装卸系统,其特征在于,所述总控系统具体用于:通过所述旅途类别确定与所述待入库的集装器对应的存储区域;判断所述存储区域内是否存在闲置的堆垛位,若是,则根据预设规则为所述待入库的集装器分配堆垛位。12.根据权利要求1所述的一种轨道交通智能装卸系统,其特征在于,所述轨道车辆还包括:车门状态检测装置,位于车门处且与所述总控系统连接,所述车门状态检测装置用于当检测到车门开启时,发送车门启动信号至所述总控系统;所述总控系统根据所述车门启动信号分别控制所述车门处输送系统和所述转台输送系统动作,以进行对接。13.根据权利要求12所述的一种轨道交通智能装卸系统,其特征在于,所述站台输送系统包括与所述总控系统连接的站台输送装置,所述站台输送装置包括:站台输送组件,用于输送货物,所述站台输送组件的一端位于站台上,另一端用于与所述车门处输送系统对接;位置调节组件,与所述站台输送组件连接,所述位置调节组件用于带动所述站台输送
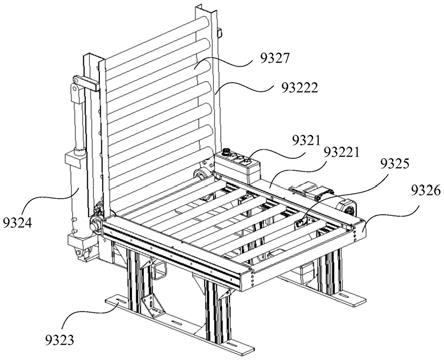
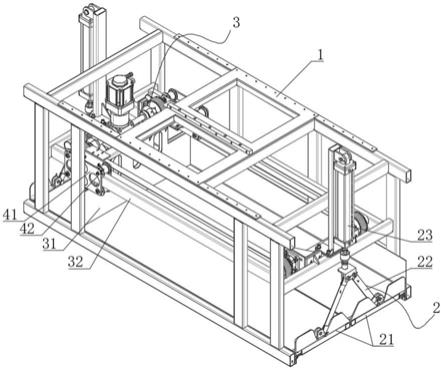
组件进行空间位置调节;所述总控系统分别与所述站台输送组件和所述位置调节组件连接,所述总控系统控制所述位置调节组件动作,以将所述站台输送组件与所述车门处输送系统对接。14.根据权利要求13所述的一种轨道交通智能装卸系统,其特征在于,所述站台输送装置还包括第一底架,用于安装所述站台输送组件和所述位置调节组件;所述位置调节组件包括:第一方向移动调节件,位于所述第一底架上,用于带动所述站台输送组件沿所述站台输送组件的长度方向前后移动;和/或,第二方向移动调节件,位于所述第一底架上,用于带动所述站台输送组件沿所述站台输送组件的宽度方向移动;和/或,第三方向移动调节件,位于所述第一底架上,用于带动所述站台输送组件沿所述站台输送组件的垂向方向移动。15.根据权利要求13所述的一种轨道交通智能装卸系统,其特征在于,所述站台输送装置还包括:车门位置检测组件,用于检测车门的位置,所述车门位置检测组件与所述总控系统连接;所述总控系统根据检测到的车门的位置,控制所述位置调节组件动作,以将所述站台输送组件的输出端与所述车门处输送系统对接。16.根据权利要求12所述的一种轨道交通智能装卸系统,其特征在于,所述车门处输送系统包括与所述总控系统连接的车门输送装置,所述车门输送装置包括:第二底架,所述第二底架用于可拆卸的连接于车辆地板上;第一车门输送组件和第二车门输送组件,分别位于所述第二底架上,所述第一车门输送组件和所述第二车门输送组件依次设置,且所述第二车门输送组件能够延伸至车门处;翻转驱动组件,所述翻转驱动组件的一端与所述第二底架铰接,另一端与所述第二车门输送组件铰接,以使所述第二车门输送组件能够在第一状态和第二状态之间翻转;其中,所述第一状态时,所述第二车门输送组件向所述第一车门输送组件方向翻转用于收缩至轨道车辆的车厢内;所述第二状态时,所述第二车门输送组件向远离所述第一车门输送组件方向翻转,用以延伸至车门处并对接所述站台输送系统。17.根据权利要求16所述的一种轨道交通智能装卸系统,其特征在于,所述翻转驱动组件包括:转轴,沿所述第一车门输送组件的宽度方向设置,且所述第二车门输送组件套装于所述转轴上;翻转驱动缸,一端铰接于所述第二底架上,另一端与所述第二车门输送组件的侧壁铰接,所述翻转驱动缸位于所述转轴的下方,且在所述第一车门输送组件的长度方向上,所述翻转驱动缸和所述转轴间设有间隔。18.根据权利要求1所述的一种轨道交通智能装卸系统,其特征在于,所述货架系统包括:架体,所述架体沿轨道车辆的纵向延伸;所述架体具有用于输送装置通过输送巷道和用于货物存放的存放区,所述输送巷道沿轨道车辆的纵向延伸,所述存放区位于所述输送巷道的两侧;
底部安装板,可拆卸的连接于所述架体的底部,用于将所述架体与轨道车辆的地板固定;拉紧装置,位于所述架体的外部,用于将所述架体与轨道车辆的顶板和/或侧墙固定。19.一种轨道车辆,其特征在于,包括:车门处输送系统,与站台输送系统对接、用于输送集装器;货架系统,用于对集装器进行存储;堆垛系统,用于对所述车门处输送系统或所述货架系统上的集装器进行抓取和扫描,并将扫描集装器得到的集装器信息发送至总控系统;所述总控系统,用于根据接收到的车门启动信号控制所述车门处输送系统和站台输送系统对接;用于根据所述集装器信息控制所述堆垛系统动作、对所述集装器进行取放。20.根据权利要求19所述的轨道车辆,其特征在于,所述堆垛系统具体用于对所述车门处输送系统的待入库的集装器进行抓取和扫描,得到待入库的集装器的集装器信息;还用于根据分配的堆垛位将所述待入库的集装器移送至所述货架系统上进行存储;所述总控系统还用于根据所述集装器信息为所述待入库的集装器分配堆垛位,并将所述集装器与其分配的堆垛位进行绑定并存储。21.根据权利要求20所述的轨道车辆,其特征在于,所述货架系统包括:堆垛位状态检测装置,与所述总控系统连接,所述堆垛位状态检测装置用于检测到集装器入库时,发送集装器到位指令至所述总控系统;所述总控系统还用于接收到堆垛位的集装器到位指令后,更新堆垛位列表信息,所述堆垛位列表信息包括所述集装器与其对应的堆垛位的绑定关系。22.根据权利要求21所述的轨道车辆,其特征在于,所述堆垛系统包括堆垛机,所述堆垛机包括:堆垛机机架;货叉,位于所述堆垛机机架上,所述货叉用于对集装器进行取放;堆垛机行走驱动装置,位于所述堆垛机机架上,用以带动所述堆垛机在轨道车辆内行走;控制装置,用于与所述总控系统连接,且所述控制装置分别与所述货叉和所述堆垛机行走驱动装置连接,所述控制装置用于控制所述堆垛机行走驱动装置行走至与所述货架系统的对应位置处,并控制所述货叉动作、对集装器进行取放。23.根据权利要求22所述的轨道车辆,其特征在于,所述堆垛系统还包括:扫码装置,固定于所述堆垛机机架上,所述扫码装置用于对集装器进行扫码,并将集装器信息发送至所述控制装置。24.根据权利要求23所述的轨道车辆,其特征在于,所述总控系统还用于:当接收到出库指令时,根据预到站的到站信息确定预出库的集装器;并根据所述预出库的集装器以及所述堆垛位列表信息,确定堆垛位的位置,并控制所述堆垛系统根据所述堆垛位的位置取出对应的所述预出库的集装器。25.根据权利要求24所述的轨道车辆,其特征在于,所述总控系统还用于:根据所述扫码装置当前扫描得到的集装器信息进行判断,当所述堆垛系统当前抓取的集装器为所述预出库的集装器时,解除所述预出库的集装器和与其对应的堆垛位的绑定关
系,并更新所述堆垛位列表信息。26.根据权利要求25所述的轨道车辆,其特征在于,所述总控系统还用于:在更新所述堆垛位列表信息后,根据所述堆垛位列表信息计算闲置的堆垛位的数量,并根据所述闲置的堆垛位的数量得到堆垛位警戒数;获取预到站的待入库的集装器的数量;当所述预到站的待入库的集装器的数量大于所述堆垛位警戒数时,进行报警。27.根据权利要求20所述的轨道车辆,其特征在于,所述总控系统具体用于:根据所述集装器信息读取集装器所装载的货物的货物站位信息;根据所述货物站位信息确定所装载的货物的旅途类型,通过所述旅途类别确定与所述待入库的集装器对应的存储区域,及所述存储区域中、所述待入库的集装器对应的堆垛位。28.根据权利要求27所述的轨道车辆,其特征在于,所述总控系统具体用于:根据所述货物站位信息确定所装载的货物的货物到站信息;根据预设列车时刻表、获取的当前站台信息和所述货物到站信息进行判断,当货物到站和当前站台间的停靠站数大于或等于预设停靠站数时,认为所装载的货物的旅途类型为长途类型;当货物到站和当前站台间的停靠站数小于所述预设停靠站数时,认为所装载的货物的旅途类型为短途类型。29.根据权利要求28所述的轨道车辆,其特征在于,所述总控系统具体用于:通过所述旅途类别确定与所述待入库的集装器对应的存储区域;判断所述存储区域内是否存在闲置的堆垛位,若是,则根据预设规则为所述待入库的集装器分配堆垛位。30.根据权利要求19所述的轨道车辆,其特征在于,所述轨道车辆还包括:车门状态检测装置,位于车门处且与所述总控系统连接,所述车门状态检测装置用于当检测到车门开启时,发送车门启动信号至所述总控系统;所述总控系统根据所述车门启动信号分别控制所述车门处输送系统和所述转台输送系统动作,以进行对接。31.根据权利要求30所述的轨道车辆,其特征在于,所述车门处输送系统包括与所述总控系统连接的车门输送装置,所述车门输送装置包括:第二底架,所述第二底架用于可拆卸的连接于车辆地板上;第一车门输送组件和第二车门输送组件,分别位于所述第二底架上,所述第一车门输送组件和所述第二车门输送组件依次设置,且所述第二车门输送组件能够延伸至车门处;翻转驱动组件,所述翻转驱动组件的一端与所述第二底架铰接,另一端与所述第二车门输送组件铰接,以使所述第二车门输送组件能够在第一状态和第二状态之间翻转;其中,所述第一状态时,所述第二车门输送组件向所述第一车门输送组件方向翻转用于收缩至轨道车辆的车厢内;所述第二状态时,所述第二车门输送组件向远离所述第一车门输送组件方向翻转,用以延伸至车门处并对接所述站台输送系统。32.根据权利要求31所述的轨道车辆,其特征在于,所述翻转驱动组件包括:转轴,沿所述第一车门输送组件的宽度方向设置,且所述第二车门输送组件套装于所述转轴上;翻转驱动缸,一端铰接于所述第二底架上,另一端与所述第二车门输送组件的侧壁铰
接,所述翻转驱动缸位于所述转轴的下方,且在所述第一车门输送组件的长度方向上,所述翻转驱动缸和所述转轴间设有间隔。33.根据权利要求19所述的轨道车辆,其特征在于,所述货架系统包括:架体,所述架体沿轨道车辆的纵向延伸;所述架体具有用于输送装置通过输送巷道和用于货物存放的存放区,所述输送巷道沿轨道车辆的纵向延伸,所述存放区位于所述输送巷道的两侧;底部安装板,可拆卸的连接于所述架体的底部,用于将所述架体与轨道车辆的地板固定;拉紧装置,位于所述架体的外部,用于将所述架体与轨道车辆的顶板和/或侧墙固定。
技术总结
本申请实施例中提供了一种轨道交通智能装卸系统及轨道车辆,包括站台输送系统,设置在站台上、用于输送轨道车辆的集装器;轨道车辆,轨道车辆包括:车门处输送系统,与站台输送系统对接、用于输送集装器;货架系统,用于对集装器进行存储;堆垛系统,用于对车门处输送系统或货架系统上的集装器进行抓取和扫描,并将扫描集装器得到的集装器信息发送至总控系统;总控系统,用于根据接收到的车门启动信号控制车门处输送系统和站台输送系统对接;用于根据集装器信息控制堆垛系统动作、对集装器进行取放。由此实现轨道车辆和站台上货物的自动化传输,同时能够进行合理分工和有效衔接,提高货物转运效率,为综合交通运输体系的搭建做好基础。础。础。
技术研发人员:李宝泉 林琳 李霞 李凯莹 魏圆良 王守斌 曹正黄 李静源 崔任永 刘义源
受保护的技术使用者:中车唐山机车车辆有限公司
技术研发日:2021.12.03
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。