1.本发明涉及摄像头制造领域,具体涉及一种叶片自动摆盘机,以及通过该叶片自动摆盘机实施的叶片摆盘方法。
背景技术:
2.安防摄像头是以安全防范视频监控为目的,将图像传感器靶面上从可见光到近红外光谱范围内的光图像转换为视频图像信号的采集装置。
3.安防摄像头被广泛使用,被安装在公共场所或者一些私人物业中,起到对环境的监控作用,也能够有力地阻吓犯罪分子,减少罪恶的发生。
4.本技术中的叶片指的是安防摄像头中的切换器叶片,为安防摄像头中的一个零件,通过叶片切换晚上白天拍照功能。
5.在叶片的生产、清洗过程中,往往需要对多个叶片进行摆放,将多个叶片整齐地进行堆叠排列,以便于转移至下一工序。现有技术中,对叶片的摆盘多少是手工操作,通过工人将一个个叶片放置于吸塑盘中,这样的作业方式往往效率低,人工成本高,而且容易出现叶片摆放正反面不一致,出现漏放、多放现象,也容易在摆放的过程中出现对叶片造成污染,影响装配后的安防摄像头拍摄清晰度。
6.一种叶片自动摆盘机,及通过该叶片摆盘机实施的叶片摆盘方法成为了需求。
技术实现要素:
7.为了解决上述问题,本发明提供一种克服上述问题或者至少部分地解决上述问题的一种叶片自动摆盘机及叶片摆盘方法。
8.依据本发明的一个方面,本发明提供了一种叶片自动摆盘机,包括按叶片进给方向依次设置的振动盘、物料输送轨道和吸塑盘摆放组件,对应该物料输送轨道的末端设有产品取料组件,该产品取料组件和吸塑盘摆放组件的上方设有横向移动轨道,物料吸取装置设置于该横向移动轨道上,所述物料吸取装置包括由横向移动马达带动左右移动的设于横向移动轨道上的横向移动底座,于该横向移动底座上设有安装板,所述安装板上可上下移动地设有纵向移动底座,所述纵向移动底座的下端设有用于拾取叶片的拾取组件,所述安装板的上端设有纵向移动马达,该纵向移动马达的转动轴上固定连接有偏心轮,该偏心轮与拾取组件之间铰接有连杆;所述偏心轮上设有定位盘,于安装板上对应该定位盘设有两位置传感器。
9.作为本发明的进一步改进,所述定位盘垂直该纵向移动马达的转动轴设置,该定位盘上设有缺口,所述位置传感器为光传感器,该传感器设有钳形检测端,两所述传感器对应定位盘设于安装板上,所述定位盘的周缘置于该钳形检测端中。
10.作为本发明的进一步改进,所述拾取组件包括至少一个吸取头,所述吸取头底面中部对应叶片的镂空位置设有定位块,所述吸取头外周上对应叶片背面的周沿凸起设有定位槽,于该吸取头的底面对应叶片的背面设有若干抽真空孔,所述抽真空孔通过管道与抽
真空设备连通。
11.作为本发明的进一步改进,所述产品取料组件包括取料底座、取料错位块,所述取料错位块由取料气缸驱使可左右移动地设置于取料底座上,所述取料底座、取料错位块上设有与所述物料输送轨道对应的物料输送通道;于该取料底座上对应错位后的取料错位块上的物料输送通道设有用于检测物料是否到位的物料传感器。
12.作为本发明的进一步改进,所述吸塑盘摆放组件包括吸塑盘摆放轨道,该吸塑盘摆放轨道与所述横向移动轨道相垂直地设置,于该吸塑盘摆放轨道上设有由吸塑盘驱动电机驱使前后移动的吸塑盘摆放平台,所述吸塑盘摆放平台上设有至少两个吸塑盘摆放位。
13.作为本发明的进一步改进,所述吸塑盘摆放组件为两个,该两个吸塑盘摆放组件平行设置。
14.作为本发明的进一步改进,所述管道上连接有用于检测并显示吸取头的吸力的检测装置。
15.作为本发明的进一步改进,对应所述物料输送轨道的前端设有第一计数器,对应所述物料输送轨道的后端设有第二计数器。
16.作为本发明的进一步改进,贯穿所述吸取头的上下表面设有两个通孔,所述定位块为两圆柱,该两圆柱插置于两通孔中,所述圆柱的末端突出通孔,所述抽真空孔为10个,该抽真空孔贯穿吸取头的上下表面设置。
17.一种通过前述叶片自动摆盘机实施的叶片摆盘方法,其包括以下步骤:
18.(1)振动盘将叶片振动至背面朝上排出;
19.(2)物料输送轨道将叶片输送至产品取料组件;
20.(3)纵向移动组件底座移动至产品取料组件上方,纵向移动马达工作,通过偏心轮带动吸取组件下降并上移,完成叶片吸取动作;
21.(4)纵向移动组件底座移动至吸塑盘摆放组件上方,纵向移动马达工作,通过偏心轮带动吸取组件下降并上移,完成叶片摆放动作;
22.(5)循环步骤(3)和(4),直至吸塑盘摆放组件上的吸塑盘摆满叶片。
23.本发明的有益效果为:本发明结构设计合理巧妙,能够自动化快速地进行叶片的摆盘,相比传统的手工作业,不会出现正反面不一致,摆放整齐,不会多放、漏放,摆放的过程中不会对叶片造成污染,有效提高生产效率,降低人工成本。
24.下面结合附图与具体实施方式,对本发明进一步说明。
附图说明
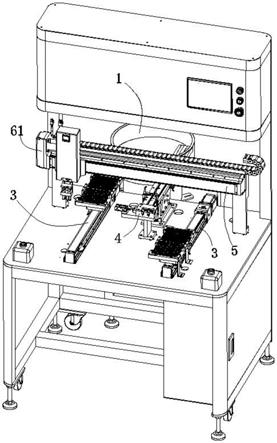
25.图1是本发明的立体图;
26.图2是本发明中叶片吸取装置的结构示意图;
27.图3是本发明中振动盘、物料输送轨道与产品取料组件的结构示意图;
28.图4是本发明中吸塑盘摆放组件的结构示意图;
29.图5是本发明中叶片的结构示意图;
30.图6是本发明中产品取料组件的分解图;
31.图7是本发明中物料吸取装置的内部结构图;
32.图8是本发明中定位盘的结构示意图;
33.图9是本发明中吸取头的结构示意图;
34.图10是本发明中吸取头拾取叶片的结构试图。
具体实施方式
35.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
36.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
38.在本发明的描述中,需要理解的是,当一个元件被认为是“连接”另一个元件,可以是直接连接到另一个元件或者可能同时存在中间元件。相反,当元件为称作“直接”与另一元件连接时,不存在中间元件。
39.实施例,参见图1至图10,本实施例提供的一种叶片自动摆盘机,包括按叶片进给方向依次设置的振动盘1、物料输送轨道2和吸塑盘摆放组件3,对应该物料输送轨道2的末端设有产品取料组件4,该产品取料组件4和吸塑盘摆放组件3的上方设有横向移动轨道5,物料吸取装置6设置于该横向移动轨道5上,所述物料吸取装置6包括由横向移动马达61带动左右移动的设于横向移动轨道5上的横向移动底座,于该横向移动底座上设有安装板62,所述安装板62上可上下移动地设有纵向移动底座63,所述纵向移动底座63的下端设有用于拾取叶片的拾取组件,所述安装板62的上端设有纵向移动马达64,该纵向移动马达64的转动轴上固定连接有偏心轮65,该偏心轮65与拾取组件之间铰接有连杆66;所述偏心轮65上设有定位盘67,于安装板62上对应该定位盘67设有两位置传感器68。
40.如图1、图2和图3所示,在本实施例中吸塑盘摆放组件3为两个,该两个吸塑盘摆放组件3与物料输送轨道2均平行设置,当物料吸取装置6在对第一个吸塑盘摆放组件3上的吸塑盘进行摆放叶片时,第二个吸塑盘摆放组件3上的吸塑盘摆放平台32位于非摆放工位,工人将已经摆满了叶片的吸塑盘取下,放上空的吸塑盘。当第一个吸塑盘摆放组件3上的吸塑盘摆放满叶片后,第二个吸塑盘摆放组件3上的吸塑盘摆放平台32移动回摆放工位,开始摆放叶片,此时第一个吸塑盘摆放组件3上的吸塑盘移动至非摆放工位,工人将已经摆满了叶片的吸塑盘取下,放上空的吸塑盘。依次循环,不断作业。
41.在本技术中,所有的电子元件,例如各种传感器,均与叶片自动摆盘机的控制系统电连接。
42.图2中缺少横向移动马达61,图7为去掉了物料吸取装置的外壳。
43.如图7和图8所示,所述定位盘67垂直该纵向移动马达64的转动轴设置,该定位盘
67上设有缺口671,所述位置传感器68为光传感器,该光传感器设有钳形检测端,两所述位置传感器68对应定位盘67设于安装板62上,所述定位盘67的周缘置于该钳形检测端中。连杆66的一端与偏心轮65铰接,该连杆66的另一端与拾取组件铰接。从而,当纵向移动马达64逆转,带动定位盘67转动,当缺口671的上边沿经过位于左侧的光传感器,偏心轮65带动连杆66下移,拾取组件下移,直至吸取头将叶片吸住;当缺口671的下边缘经过位于右侧的光传感器,纵向移动马达64正转,从而吸取头吸住叶片上移,完成了一个拾取动作。
44.如图5、图9、图10所示,所述拾取组件包括至少一个吸取头69,所述吸取头69底面中部对应叶片的镂空位置设有定位块691,所述吸取头69外周上对应叶片背面的周沿凸起设有定位槽692,于该吸取头69的底面对应叶片10的背面设有若干抽真空孔693,所述抽真空孔693通过管道与抽真空设备连通。
45.贯穿所述吸取头69的上下表面设有两个通孔694,所述定位块691为两圆柱,该两圆柱插置于两通孔694中,所述圆柱的末端突出通孔694,所述抽真空孔693为10个,该抽真空孔693贯穿吸取头69的上下表面设置。
46.使用时,所示定位块691会插入叶片上的圆孔中,并且定位槽692与叶片的周沿相配合,起到定位作用,防止叶片位移。通过抽真空孔693进行抽真空,使得叶片的背面被吸附在吸取头69的底部。
47.如图6所示,所述产品取料组件4包括取料底座41、取料错位块42,所述取料错位块42由取料气缸43驱使可左右移动地设置于取料底座41上,所述取料底座41、取料错位块42上设有与所述物料输送轨道2对应的物料输送通道44;于该取料底座41上对应错位后的取料错位块42上的物料输送通道44设有用于检测物料是否到位的物料传感器45。在本技术中,物料输送轨道2上并列设有两条物料输送通道44,该取料底座41、取料错位块42上对应设有物料输送通道44,当叶片依次经过物料输送轨道2、取料底座41并进入取料错位块42时,此时在取料错位块42上一共为并列的两个叶片10,取料气缸43驱使取料错位块42位移,形成错位,此时两物料传感器45感应到取料错位块42上的叶片,从而控制系统发出信号,控制叶片吸取装置进行叶片的拾取。当叶片被拾取后,取料气缸43控制取料错位块42复位。
48.如图1、图4所示,所述吸塑盘摆放组件3包括吸塑盘摆放轨道31,该吸塑盘摆放轨道31与所述横向移动轨道5相垂直地设置,于该吸塑盘摆放轨道31上设有由吸塑盘驱动电机33驱使前后移动的吸塑盘摆放平台32,所述吸塑盘摆放平台32上设有至少两个吸塑盘摆放位。在其他实施例中,也可以为1个。由吸塑盘驱动电机33驱使吸塑盘摆放平台32前后移动,从而在摆放工位和非摆放工位之间切换。
49.如图1所示,所述吸塑盘摆放组件3为两个,该两个吸塑盘摆放组件3平行设置。当其中一个吸塑盘摆放组件3上的吸塑盘摆放平台32位于摆放工位时,另一吸塑盘摆放组件3上的吸塑盘摆放工位位于非摆放工位。
50.如图2所示,所述管道上连接有用于检测并显示吸取头69的吸力的检测装置695。当吸力达到或高于设定值,才表示吸取头69已经吸取了叶片,低于则代表没有成功吸取。该设定值可根据实际情况调节。
51.如图1所示,对应所述物料输送轨道2的前端设有第一计数器21,对应所述物料输送轨道2的后端设有第二计数器22。第一计数器21用于振动盘1输送至物料输送轨道2上的叶片数量,第二计数器22用于发出信号至控制系统,当取料错位块42上有叶片时,振动盘1
停止输送叶片。
52.一种通过前述叶片自动摆盘机实施的叶片摆盘方法,其包括以下步骤:
53.(1)振动盘1将叶片振动至背面朝上排出;
54.(2)物料输送轨道2将叶片输送至产品取料组件4;
55.(3)纵向移动组件底座移动至产品取料组件4上方,纵向移动马达64工作,通过偏心轮65带动吸取组件下降并上移,完成叶片吸取动作;
56.(4)纵向移动组件底座移动至吸塑盘摆放组件3上方,纵向移动马达64工作,通过偏心轮65带动吸取组件下降并上移,完成叶片摆放动作;
57.(5)循环步骤(3)和(4),直至吸塑盘摆放组件3上的吸塑盘摆满叶片。
58.本发明结构设计合理巧妙,能够自动化快速地进行叶片的摆盘,相比传统的手工作业,不会出现正反面不一致,摆放整齐,不会多放、漏放,摆放的过程中不会对叶片造成污染,有效提高生产效率,降低人工成本。
59.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
60.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的技术手段和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。故凡是未脱离本发明技术方案的内容,依据本发明之形状、构造及原理所作的等效变化,均应涵盖于本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。