1.本实用新型涉及机械臂设备技术领域,特别涉及一种远程协作机器人的机械臂结构。
背景技术:
2.远程协作是指通过远程操控的方式控制机器人进行特殊的作业,机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,机械臂能够模拟人类的手臂实现多种作业,因其独特的操作灵活性,广泛应用于工业装配, 安全防爆等领域;现有的机械臂结构在使用时存在一定的弊端,目前的机械臂在远程协作时操控较为困难,不能全方位的控制转向,难以满足日益复杂的远程协作需求,且机械臂的夹取装置稳定性较差,给实际操控带来了诸多隐患。
技术实现要素:
3.本实用新型的主要目的在于提供一种远程协作机器人的机械臂结构,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种远程协作机器人的机械臂结构,包括工作台,所述工作台的上表面活动安装有活动轴盘,所述活动轴盘的上方活动安装有二号活动轴,所述二号活动轴的上方活动安装有转向轴柱,所述转向轴柱的侧表面固定安装有微调箱,所述微调箱的输出端表面固定安装有限位套柱。
6.优选的,所述工作台的两侧边缘位置处活动安装有越野车轮,所述越野车轮的侧表面周围位置上套设安装有越野履带,所述工作台的上表面位于活动轴盘的一侧位置处固定安装有动力泵。
7.优选的,所述活动轴盘的上表面居中位置处固定安装有一号活动轴,所述一号活动轴的侧表面上活动安装有一号杆架,所述一号杆架的数量是两个,所述一号杆架之间相互平行,所述一号活动轴的上表面居中位置处固定安装有全景摄像头。
8.优选的,所述二号活动轴的上表面固定安装有二号杆架,所述二号杆架的数量是两个,所述二号杆架之间相互平行,所述二号杆架之间活动安装有三号活动轴。
9.优选的,所述转向轴柱活动安装在三号活动轴的上表面,所述微调箱的内部上方位置处固定安装有液压气缸,所述液压气缸的输出端表面居中位置上活动安装有伸缩轴架。
10.优选的,所述限位套柱的内部位于伸缩轴架的侧表面位置处固定安装有夹具座,所述夹具座的下表面活动安装有夹取钳头,所述夹取钳头的数量是四个,所述夹取钳头之间连接安装有回位弹簧。
11.与现有技术相比,本实用新型具有如下有益效果:
12.本实用新型中,通过设置的全景摄像头拍摄工作台周围的全景视频,通过基站将
信息传递给远程主机,由主机进行建模,方便操作人员的远程协作操控,远程主机进一步将命令传递给工作台,控制越野车轮转动,配合越野履带可以适应各种地形,方便工作台的移动,通过活动轴盘控制上方的组件不同角度的横向转动,方便机械臂与目标物体对齐,一号活动轴控制一号杆架转动,二号活动轴配合二号杆架进一步控制转向轴柱在竖直平面的转动,从而实现机械臂的升降与前倾位移,通过转向轴柱控制微调箱在水平平面的转动,进而控制夹取钳头的角度与方向,通过液压气缸可以控制伸缩轴架上下移动,当伸缩轴架移动到下方位置时,夹取钳头摆脱限位套柱的限制,在回位弹簧的作用下张开,当伸缩轴架移动到上方位置时,夹取钳头在限位套柱的作用下合并,由此实现对目标物体的夹取,增加了夹取的稳固性,方便操作人员远程操控,使得人员能够第一时间在一些危险环境进行作业。
附图说明
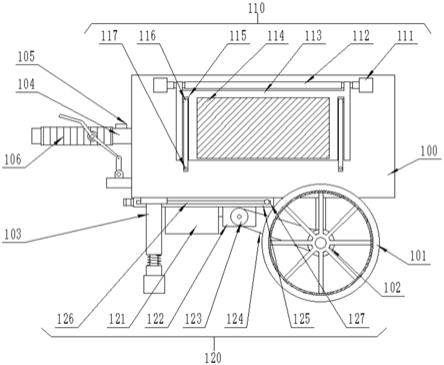
13.图1为本实用新型一种远程协作机器人的机械臂结构的工作台安装示意图;
14.图2为本实用新型一种远程协作机器人的机械臂结构的工作台结构正视图;
15.图3为本实用新型一种远程协作机器人的机械臂结构的图1的a处放大图;
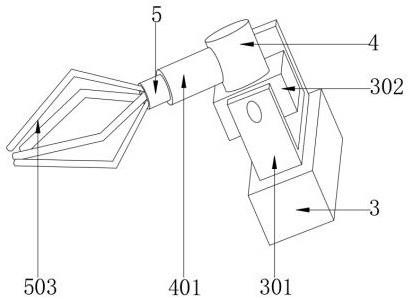
16.图4为本实用新型一种远程协作机器人的机械臂结构的微调箱安装示意图;
17.图5为本实用新型一种远程协作机器人的机械臂结构的微调箱结构截面图。
18.图中:1、工作台;101、越野履带;102、越野车轮;103、动力泵;2、活动轴盘;201、一号活动轴;202、一号杆架;203、全景摄像头;3、二号活动轴;301、二号杆架;302、三号活动轴;4、转向轴柱;401、微调箱;402、液压气缸;403、伸缩轴架;5、限位套柱;501、夹具座;502、回位弹簧;503、夹取钳头。
具体实施方式
19.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
20.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
21.如图1-5所示,一种远程协作机器人的机械臂结构,包括工作台1,工作台1的上表面活动安装有活动轴盘2,活动轴盘2的上方活动安装有二号活动轴3,二号活动轴3的上方活动安装有转向轴柱4,转向轴柱4的侧表面固定安装有微调箱401,微调箱401的输出端表面固定安装有限位套柱5;
22.工作台1的两侧边缘位置处活动安装有越野车轮102,越野车轮102的侧表面周围
位置上套设安装有越野履带101,工作台1的上表面位于活动轴盘2的一侧位置处固定安装有动力泵103;活动轴盘2的上表面居中位置处固定安装有一号活动轴201,一号活动轴201的侧表面上活动安装有一号杆架202,一号杆架202的数量是两个,一号杆架202之间相互平行,一号活动轴201的上表面居中位置处固定安装有全景摄像头203;二号活动轴3的上表面固定安装有二号杆架301,二号杆架301的数量是两个,二号杆架301之间相互平行,二号杆架301之间活动安装有三号活动轴302;转向轴柱4活动安装在三号活动轴302的上表面,微调箱401的内部上方位置处固定安装有液压气缸402,液压气缸402的输出端表面居中位置上活动安装有伸缩轴架403;限位套柱5的内部位于伸缩轴架403的侧表面位置处固定安装有夹具座501,夹具座501的下表面活动安装有夹取钳头503,夹取钳头503的数量是四个,夹取钳头503之间连接安装有回位弹簧502。
23.需要说明的是,本实用新型为一种远程协作机器人的机械臂结构,在使用时,全景摄像头203拍摄工作台1周围的全景视频,通过基站将信息传递给远程主机,由主机进行建模,方便操作人员的远程协作操控,远程主机进一步将命令传递给工作台1,控制越野车轮102转动,配合越野履带101可以适应各种地形,方便工作台1的移动,通过活动轴盘2控制上方的组件不同角度的横向转动,方便机械臂与目标物体对齐,一号活动轴201控制一号杆架202转动,二号活动轴3配合二号杆架301进一步控制转向轴柱4在竖直平面的转动,从而实现机械臂的升降与前倾位移,通过转向轴柱4控制微调箱401在水平平面的转动,进而控制夹取钳头503的角度与方向,通过液压气缸402可以控制伸缩轴架403上下移动,当伸缩轴架403移动到下方位置时,夹取钳头503摆脱限位套柱5的限制,在回位弹簧502的作用下张开,当伸缩轴架403移动到上方位置时,夹取钳头503在限位套柱5的作用下合并,由此实现对目标物体的夹取,增加了夹取的稳固性,方便操作人员远程操控,使得人员能够第一时间在一些危险环境进行作业。
24.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。