1.本实用新型涉及机器人技术领域,具体为鹰眼机器人。
背景技术:
2.机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。儿童用监控机器人又叫做鹰眼机器人。
3.现有技术中,鹰眼机器人在使用时,视觉传感器监控角度不便于调节,竖直方向视角范围小,同时,装置长时间使用后,视觉传感器上会沾染灰尘,影响图像质量。因此,需要对现有技术进行改进。
技术实现要素:
4.本实用新型的目的在于提供鹰眼机器人,解决了视觉传感器监控角度不便于调节的问题,还解决了视觉传感器上会沾染灰尘的问题。
5.为实现上述目的,本实用新型提供如下技术方案:鹰眼机器人,包括框架,所述框架内滑动连接有滑板,所述滑板上固定安装有主控板,所述框架上固定安装有马达,所述马达的输出端和框架转动连接,所述马达的输出端上固定连接有车轮,所述框架内固定安装有循迹传感器,所述框架内焊接有支撑柱,所述支撑柱的外侧套接有隔板,所述支撑柱内通过螺纹连接有限位销,所述限位销的外侧活动连接有支撑板,所述限位销的外侧设置有弹簧,所述支撑板上焊接有壳体,所述支撑板上固定安装有气缸,所述气缸的气缸杆和支撑板滑动连接,所述气缸杆的末端铰接有支撑环,所述支撑环内滑动套接有视觉传感器,所述支撑板上焊接有连杆,所述连杆的末端铰接有视觉传感器,所述壳体上接触有密封垫,所述密封垫上粘接有透明罩,所述透明罩上设置有插销,所述壳体上开设有插孔,所述插孔内卡接有插销。
6.优选的,所述框架上焊接有支撑杆,所述支撑杆的末端通过螺钉连接有滑板。
7.优选的,所述支撑柱有四个,四个所述支撑柱均匀分布在框架上。
8.优选的,所述马达有四个,四个所述马达均匀分布在框架内。
9.优选的,所述弹簧的一端和支撑柱接触,所述弹簧的另一端和支撑板接触。
10.优选的,所述壳体内粘接有波纹套,所述波纹套内套接有视觉传感器。
11.与现有技术相比,本实用新型的有益效果如下:
12.1、本实用新型通过设置气缸、气缸杆、支撑环、连杆等结构,在使用装置时,通过启动气缸驱动气缸杆伸缩可以使得支撑环上下移动,进而使得支撑环在视觉传感器上滑动,使得视觉传感器可以对竖直方向调节角度,使得视觉传感器视角范围更广。
13.2、本实用新型通过设置透明罩、密封垫、插销、插孔等结构,通过插销和插孔配合使得透明罩固定在壳体上,进而使得透明罩将密封垫压紧,进而对视觉传感器进行防护,避免视觉传感器上沾染灰尘,使得摄像效果更好。
附图说明
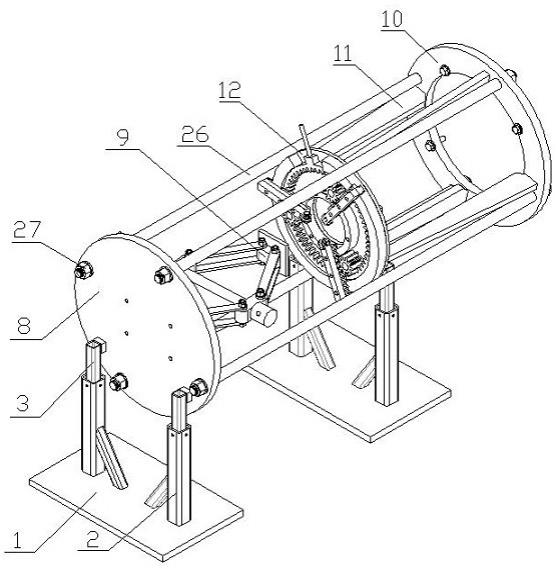
14.图1为本实用新型整体结构示意图;
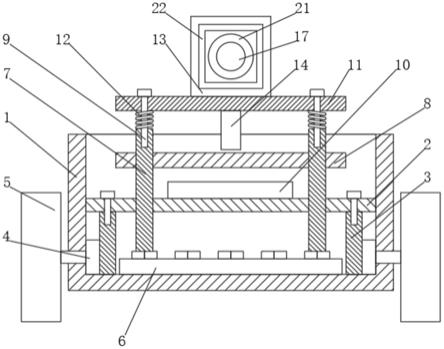
15.图2为本实用新型图1的壳体右视图;
16.图3为本实用新型图2中的a处放大图。
17.图中:1、框架;2、滑板;3、支撑杆;4、马达;5、车轮;6、循迹传感器;7、支撑柱;8、隔板;9、限位销;10、主控板;11、支撑板;12、弹簧;13、壳体;14、气缸;15、气缸杆;16、支撑环;17、视觉传感器;18、连杆;19、波纹套;21、密封垫;22、透明罩;23、插销;24、插孔。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1-3,鹰眼机器人,包括框架1,框架1内滑动连接有滑板2,滑板2上固定安装有主控板10,框架1上固定安装有马达4,马达4的输出端和框架1转动连接,马达4的输出端上固定连接有车轮5,框架1内固定安装有循迹传感器6,框架1内焊接有支撑柱7,支撑柱7的外侧套接有隔板8,支撑柱7内通过螺纹连接有限位销9,限位销9的外侧活动连接有支撑板11,限位销9的外侧设置有弹簧12,支撑板11上焊接有壳体13,支撑板11上固定安装有气缸14,气缸14的气缸杆15和支撑板11滑动连接,气缸杆15的末端铰接有支撑环16,支撑环16内滑动套接有视觉传感器17,支撑板11上焊接有连杆18,连杆18的末端铰接有视觉传感器17,壳体13上接触有密封垫21,密封垫21上粘接有透明罩22,透明罩22上设置有插销23,壳体13上开设有插孔24,插孔24内卡接有插销23。
20.请参阅图1,框架1上焊接有支撑杆3,支撑杆3的末端通过螺钉连接有滑板2。通过设置支撑杆3,对滑板2进行支撑。
21.请参阅图1,支撑柱7有四个,四个支撑柱7均匀分布在框架1上。通过设置四个支撑柱7,使得支撑板11更加稳定。
22.请参阅图1,马达4有四个,四个马达4均匀分布在框架1内。通过设置四个马达4,使得装置整体移动更加稳定。
23.请参阅图1,弹簧12的一端和支撑柱7接触,弹簧12的另一端和支撑板11接触。通过设置弹簧12,对支撑板11进行减震。
24.请参阅图2,壳体13内粘接有波纹套19,波纹套19内套接有视觉传感器17。通过设置波纹套19,避免壳体13内进入灰尘。
25.本实用新型具体实施过程如下:使用时,通过马达4驱动车轮5移动使得装置整体便于移动,启动气缸14,气缸14启动气缸杆15伸缩,气缸杆15伸缩带动支撑环16上下移动,支撑环16移动使得支撑环16在视觉传感器17表面滑动,进而使得视觉传感器17倾斜角度发生变化,通过设置气缸14、气缸杆15、支撑环16、连杆18等结构,在使用装置时,通过启动气缸14驱动气缸杆15伸缩可以使得支撑环16上下移动,进而使得支撑环16在视觉传感器17上滑动,使得视觉传感器17竖直方向上可以调节角度,使得视觉传感器17视角范围更广,通过设置透明罩22、密封垫21、插销23、插孔24等结构,通过插销23和插孔24配合使得透明罩22
固定在壳体13上,进而使得透明罩22将密封垫21压紧,进而对视觉传感器17进行防护,避免视觉传感器17上沾染灰尘,使得摄像效果更好,对于视觉传感器17,在使用时,按下图像识别模块右边的reset按键,led闪烁一次红色,表示串口模式进入成功,按下图像识别模块右边的reset按键,led闪烁一次绿色,表示iic模式进入成功,按下图像识别模块右边的reset按键,led闪烁一次黄色,表示wifi模式进入成功,按下图像识别模块右边的reset按键,led闪烁一次紫色,表示图传模式进入成功,图传模式可以通过浏览器实时查看图像,浏览器输入地址。
26.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.鹰眼机器人,包括框架(1),其特征在于:所述框架(1)内滑动连接有滑板(2),所述滑板(2)上固定安装有主控板(10),所述框架(1)上固定安装有马达(4),所述马达(4)的输出端和框架(1)转动连接,所述马达(4)的输出端上固定连接有车轮(5),所述框架(1)内固定安装有循迹传感器(6),所述框架(1)内焊接有支撑柱(7),所述支撑柱(7)的外侧套接有隔板(8),所述支撑柱(7)内通过螺纹连接有限位销(9),所述限位销(9)的外侧活动连接有支撑板(11),所述限位销(9)的外侧设置有弹簧(12),所述支撑板(11)上焊接有壳体(13),所述支撑板(11)上固定安装有气缸(14),所述气缸(14)的气缸杆(15)和支撑板(11)滑动连接,所述气缸杆(15)的末端铰接有支撑环(16),所述支撑环(16)内滑动套接有视觉传感器(17),所述支撑板(11)上焊接有连杆(18),所述连杆(18)的末端铰接有视觉传感器(17),所述壳体(13)上接触有密封垫(21),所述密封垫(21)上粘接有透明罩(22),所述透明罩(22)上设置有插销(23),所述壳体(13)上开设有插孔(24),所述插孔(24)内卡接有插销(23)。2.根据权利要求1所述的鹰眼机器人,其特征在于:所述框架(1)上焊接有支撑杆(3),所述支撑杆(3)的末端通过螺钉连接有滑板(2)。3.根据权利要求1所述的鹰眼机器人,其特征在于:所述支撑柱(7)有四个,四个所述支撑柱(7)均匀分布在框架(1)上。4.根据权利要求1所述的鹰眼机器人,其特征在于:所述马达(4)有四个,四个所述马达(4)均匀分布在框架(1)内。5.根据权利要求1所述的鹰眼机器人,其特征在于:所述弹簧(12)的一端和支撑柱(7)接触,所述弹簧(12)的另一端和支撑板(11)接触。6.根据权利要求1所述的鹰眼机器人,其特征在于:所述壳体(13)内粘接有波纹套(19),所述波纹套(19)内套接有视觉传感器(17)。
技术总结
本实用新型属于机器人领域,具体涉及鹰眼机器人,包括框架,所述框架内滑动连接有滑板,所述滑板上固定安装有主控板,所述框架上固定安装有马达,所述马达的输出端和框架转动连接,所述马达的输出端上固定连接有车轮,所述框架内固定安装有循迹传感器,所述框架内焊接有支撑柱,所述支撑柱的外侧套接有隔板,所述支撑柱内通过螺纹连接有限位销,所述限位销的外侧活动连接有支撑板。本实用新型通过设置气缸、气缸杆、支撑环、连杆等结构,在使用装置时,通过启动气缸驱动气缸杆伸缩可以使得支撑环上下移动,进而使得支撑环在视觉传感器上滑动,使得视觉传感器可以对竖直方向调节角度,使得视觉传感器视角范围更广。使得视觉传感器视角范围更广。使得视觉传感器视角范围更广。
技术研发人员:丁嘉豪 林楚涛 任翔 许思敏 易诗萍
受保护的技术使用者:广东小镰刀教育科技有限公司
技术研发日:2021.07.23
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。