1.本发明涉及耐久性试验装置技术领域,特别涉及一种飞机舱门机构耐久性试验装置及其试验方法。
背景技术:
2.舱门机构是飞机系统的重要组成,满足人员、货物进出和应急撤离的需求,在飞行过程中承受气压载荷并维持飞机结构的完整性、气密性。舱门机构的工作性能直接影响到飞行任务的顺利完成和机组乘客的生命安全,舱门机构功能试验因此也成为了飞机试验验证和适航取证的重要一环。
3.舱门机构功能试验的核心是高频次开关舱门的耐久性试验,以此研究舱门机构在全生命周期内各项结构性能发生变化的规律。传统的手动开关舱门的试验方式存在劳动力成本高、工作强度大、测试一致性与测试覆盖性差的问题。
技术实现要素:
4.本发明的目的是提供一种飞机舱门机构耐久性试验装置及其试验方法,通过自动化的耐久性试验装置替代人工操作,以显著提升试验效率,保证过程安全和结果可靠。
5.为了实现以上目的,本发明通过以下技术方案实现:
6.一种飞机舱门机构耐久性试验装置,包括:六轴机器人、机器人控制器、可移动底盘、六维力传感器、转动关节组件、夹持组件、视觉组件;
7.所述六轴机器人和所述机器人控制器安装在所述可移动底盘上,所述六维力传感器、所述转动关节组件安装在所述六轴机器人的末端第六关节上,所述夹持组件安装在所述转动关节组件上,所述视觉组件安装在所述六轴机器人的本体第三关节上,所述夹持组件用于夹持舱门把手,所述转动关节组件用于模拟开关门时手腕转动的动作,所述六维力传感器用于在开关门过程中实时测量开关门力和力矩数据并反馈给所述机器人控制器,所述视觉组件用于获得舱门把手在机器人坐标系中的坐标并反馈给所述机器人控制器。
8.进一步的,所述可移动底盘包括调节地脚,在所述可移动底盘位置调整到位后,将所述调节地脚伸出,用于增加底盘与地面的接触面积。
9.进一步的,所述可移动底盘包括控制组件和驱动组件,所述控制组件控制所述驱动组件动作,实现底盘移动,所述驱动组件采用伺服电机双轮差速的方式。
10.进一步的,所述可移动底盘包括电源组件,所述电源组件采用锂电池。
11.进一步的,所述可移动底盘包括安全防护组件,所述安全防护组件至少包括激光避障传感器、机械防撞条和急停按钮。
12.进一步的,所述可移动底盘包括机器人安装底座,所述六轴机器人安装在所述机器人安装底座上。
13.进一步的,所述转动关节组件采用电机驱动,带动所述夹持组件旋转。
14.进一步的,所述夹持组件包括电动抓手和夹持工装,所述夹持工装设置于所述电
动抓手上,所述电动抓手驱动所述夹持工装夹紧所述舱门把手。
15.进一步的,所述夹持工装包括v型夹块、滚子轴承、包覆层,所述包覆层包裹所述滚子轴承,所述电动抓手驱动所述v型夹块夹紧舱门把手,所述包覆层与所述舱门把手接触,所述滚子轴承释放所述舱门把手与所述v型夹块间的局部旋转自由度。
16.一种飞机舱门机构耐久性试验方法,采用如上文所述的飞机舱门机构耐久性试验装置实现,包括以下步骤:
17.s1、通过可移动底盘将舱门机构耐久性试验装置移动至舱门试验台架的舱门内侧;
18.s2、六轴机器人运动至初始位置;
19.s3、视觉组件获取舱门把手在机器人坐标系中的坐标,并反馈给机器人控制器;
20.s4、机器人控制器驱动六轴机器人动作,使夹持组件对准舱门把手;
21.s5、夹持组件动作,夹持舱门把手;
22.s6、六轴机器人和转动关节组件联合动作,实现舱门打开,开门过程中六维力传感器实时监控开门力和力矩数据,并反馈给机器人控制器,所述机器人控制器通过力位反馈控制,调整开门轨迹、速度;
23.s7、舱门打开到位后,夹持组件动作,松开舱门把手;
24.s8、视觉组件获取舱门把手在机器人坐标系中的坐标,并反馈给机器人控制器;
25.s9、机器人控制器驱动六轴机器人动作,夹持组件对准舱门把手;
26.s10、夹持组件动作,夹持舱门把手;
27.s11、六轴机器人和转动关节组件联合动作,实现舱门关闭,关门过程中六维力传感器实时监控关门力和力矩数据,并反馈给机器人控制器,所述机器人控制器通过力位反馈控制,调整开门轨迹、速度;
28.s12、舱门关闭到位后,夹持组件动作,松开舱门把手;
29.重复上述s3~s12的开门-关门动作循环,并在此过程中进行舱门机构的各项测试、测量,直至耐久性试验结束。
30.与现有技术相比,本发明具有如下优点:
31.本发明提供的一种飞机舱门机构耐久性试验装置,以六轴机器人搭配可移动底盘、六维力传感器、转动关节组件、夹持组件、视觉组件等,充分利用六轴机器人的运动灵活性高、运动范围大的优点,替代人工完成舱门把手的夹持、推拉、扭转等动作,并实现舱门开关过程中的解锁、解闩、提升以及外开等的完整复杂轨迹。可移动底盘的设计实现试验装置在不同的舱门对象间的转场移动,并通过机器人的运动控制模拟不同的开关门轨迹,满足装置通用性需求。六维力传感器和视觉组件实现开关门过程中的实时监控和力觉/视觉反馈控制,确保过程安全性,并实现过程数据的实时记录。
附图说明
32.为了更清楚地说明本发明的技术方案,下面将对描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图:
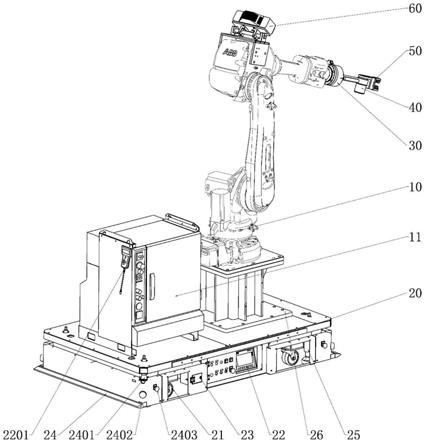
33.图1为本发明一实施例提供的飞机舱门机构耐久性试验装置的整体结构示意图;
34.图2为本发明一实施例提供的夹持组件夹持舱门把手的结构示意图;
35.图3为本发明一实施例提供的飞机舱门机构耐久性试验装置的试验场景示意图;
36.图4为本发明一实施例提供的飞机舱门机构耐久性试验方法的流程图。
具体实施方式
37.以下结合附图和具体实施方式对本发明提出的方案作进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需要说明的是,附图采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施方式的目的。为了使本发明的目的、特征和优点能够更加明显易懂,请参阅附图。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
38.飞机舱门机构耐久性试验装置,其装置可达性要等效于人工动作行为的可达性,替代人工完成舱门把手的夹持、推拉、扭转等动作,实现舱门机构的解锁、解闩、提升以及外开的完整轨迹流程。舱门机构的传动、联动机理非常复杂,开门动作涉及把手上提、舱门外推、舱门平移等几个步骤,舱门把手处为多段旋转、平移或其他复杂轨迹的复合,试验装置的工艺复杂性较高。因此,试验装置需具有较高的通用性和扩展性,满足不同型号舱门的试验需求。在试验过程中需避免位置偏差或部件卡顿造成的轨迹偏差、阻力异常等,避免对试验对象和试验装置的损伤,并对试验过程中的关键数据信息进行实时监控记录,确保过程可溯。
39.如图1所示,本发明提供的一种飞机舱门机构耐久性试验装置包括六轴机器人10、机器人控制器11、可移动底盘20、六维力传感器30、转动关节组件40、夹持组件50和视觉组件60。六轴机器人10和机器人控制器11安装在可移动底盘20上,六维力传感器30、转动关节组件40安装在六轴机器人10的末端第六关节上,夹持组件50安装在转动关节组件上,视觉组件60安装在六轴机器人10的本体第三关节上,所述夹持组件50用于夹持舱门把手,所述转动关节组件40用于模拟开关门时手腕转动的动作,所述六维力传感器30用于在开关门过程中实时测量开关门力和力矩数据并反馈给所述机器人控制器11,所述视觉组件60用于获得舱门把手在机器人坐标系中的坐标并反馈给所述机器人控制器11。本发明通过六轴机器人10、六维力传感器30、转动关节组件40、夹持组件50、视觉组件60模拟了手动开关舱门的操作,试验装置的可达性等效于人工动作行为的可达性,用于替代人工完成舱门把手的夹持、推拉、扭转等动作,并实现舱门开关过程中的解锁、解闩、提升以及外开等的完整复杂轨迹,并满足试验装置通用性、试验过程安全性和过程数据实时监控的需求。
40.本实施例中,所述可移动底盘20可以包括驱动组件21、控制组件22、电源组件23、安全防护组件24、调节地脚25、机器人安装底座26等,是整个试验装置的安装基础,通过底盘的移动实现试验装置的转场移动与位置调整,满足不同舱门对象的耐久性试验需求,提升试验装置的通用化程度。所述六轴机器人10安装在所述机器人安装底座26上。所述控制组件22控制所述驱动组件21动作,实现底盘移动。所述控制组件22可以包括一个手持式控制器2201,通过手动方式控制驱动组件21动作,实现底盘移动。所述驱动组件21可以采用伺
服电机双轮差速的方式,满足可移动底盘20前进后退、左右转弯的运动需求。所述电源组件23可以采用锂电池供电,满足底盘移动式的电源续航需求。所述安全防护组件24,可以包括激光避障传感器2401、机械防撞条2402、急停按钮2403,实现移动过程中遇到障碍时的声光报警、主动减速或紧急停止等,当然也可以包括其它类型的安全防护功能。所述调节地脚25,在底盘位置调整到位后,手动调节将地脚伸出,增加与地面的接触面积,确保试验过程中的可移动底盘20的稳定性。
41.所述六维力传感器30可以实现空间内x、y、z方向的力和力矩的实时测量,并可以通过与机器人控制器11间的交互通信,实现力位反馈控制,完成舱门开关过程中的轨迹偏差、运动卡滞、阻力异常情况下的机器人运动轨迹和速度的自适应调整。
42.所述视觉组件60可以对舱门把手进行实时准确的拍照并进行定位,通过与机器人控制器11的通信,引导机器人运动,补偿高频次测试过程中位置变动带来的轨迹偏差。
43.所述转动关节40为电机驱动,带动安装在其上的夹持组件50旋转,模拟手动将舱门外开到底的过程中的手腕转动的动作,避免与舱门边框或蒙皮的干涉碰撞。
44.所述夹持组件50用于夹持舱门把手,实现舱门把手的旋转、推拉,完成舱门开关动作。如图2所示,所述夹持组件50包括电动抓手51、夹持工装52,所述夹持工装52设置于所述电动抓手51上,所述电动抓手51驱动所述夹持工装夹紧所述舱门把手7301。
45.所述的夹持工装52包括v型夹块5201、滚子轴承5202、包覆层5203等,所述包覆层选择高强度、耐磨的材料,例如聚氨酯材料。滚子轴承5202安装在v型夹块5201上,包覆层5203包裹在滚子轴承5202上。当电动抓手51驱动v型夹块5201夹紧舱门把手7301时,聚氨酯包覆层5203与舱门把手7301接触,避免把手磨损。滚子轴承5202的设计则确保在夹紧舱门把手7301的同时,释放舱门把手7301与v型夹块5201间的局部旋转自由度。
46.本实施例中,如图3所示,舱门试验台架70包括固定机架71、舱门边框72、舱门试验件73。当进行舱门机构耐久性试验时,试验装置00安装在舱门试验台架70的舱门内侧,通过夹持组件50夹持舱门试验件73的舱门把手7301,并在六轴机器人10的动作下,实现舱门试验件73的开关动作。
47.基于同一发明构思,本发明还提供了一种飞机舱门机构耐久性试验方法,采用上述的飞机舱门机构耐久性试验装置实现,如图4所示,包括如下步骤:
48.s1、通过可移动底盘将舱门机构耐久性试验装置移动至舱门试验台架的舱门内侧;其中在位置调整到位后可将调节地脚伸出;
49.s2、六轴机器人运动至初始位置;
50.s3、视觉组件获取舱门把手在机器人坐标系中的坐标,并反馈给机器人控制器;其中,视觉组件拍摄舱门把手,图像处理后进行坐标变换,从而获得舱门把手在机器人坐标系中的坐标;
51.s4、机器人控制器驱动六轴机器人动作,使夹持组件对准舱门把手;
52.s5、夹持组件动作,夹持舱门把手;
53.s6、六轴机器人和转动关节组件联合动作,实现舱门打开,开门过程中六维力传感器实时监控开门力和力矩数据,并反馈给机器人控制器,所述机器人控制器通过力位反馈控制,调整开门轨迹、速度;
54.s7、舱门打开到位后,夹持组件动作,松开舱门把手;
55.s8、视觉组件获取舱门把手在机器人坐标系中的坐标,并反馈给机器人控制器;
56.s9、机器人控制器驱动六轴机器人动作,夹持组件对准舱门把手;
57.s10、夹持组件动作,夹持舱门把手;
58.s11、六轴机器人和转动关节组件联合动作,实现舱门关闭,关门过程中六维力传感器实时监控关门力和力矩数据,并反馈给机器人控制器,所述机器人控制器通过力位反馈控制,调整开门轨迹、速度;
59.s12、舱门关闭到位后,夹持组件动作,松开舱门把手;
60.重复上述s3~s12的开门-关门动作循环,并在此过程中进行舱门机构的各项测试、测量,直至耐久性试验结束。
61.综上所述,本发明提供的一种飞机舱门机构耐久性试验装置,以六轴机器人搭配可移动底盘、六维力传感器、转动关节组件、夹持组件、视觉组件等,充分利用六轴机器人的运动灵活性高、运动范围大的优点,替代人工完成舱门把手的夹持、推拉、扭转等动作,并实现舱门开关过程中的解锁、解闩、提升以及外开等的完整复杂轨迹。可移动底盘的设计实现试验装置在不同的舱门对象间的转场移动,并通过机器人的运动控制模拟不同的开关门轨迹,满足装置通用性需求。六维力传感器和视觉组件实现开关门过程中的实时监控和力觉/视觉反馈控制,确保过程安全性,并实现过程数据的实时记录。
62.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
63.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
