1.本发明涉及仿生机器人技术领域,特别涉及一种基于介电弹性体驱动的仿飞鱼机器人。
背景技术:
2.仿生技术已经成为当今一大热点,经过生物的进化,物竞天择,适者生存,生物对环境的适应能力越来越来强,飞鱼作为一种能够跨介质飞行的海洋生物,其身体结构值得研究,针对飞鱼的这一特点进行仿生设计,在研究水空两栖特种机器人领域有很大的借鉴意义。
3.当前飞鱼在空中飞行时胸鳍并非拍动的,现有的水空两栖特种机器人只实现了胸鳍的展开以及水空的切换,结构和驱动方式比较传统,提供的升力不足,没办法做到长距离的飞行,还没有做到对飞鱼的真正模仿甚至超越;本发明是采用介电弹性体驱动胸鳍的展开进行仿生以及胸鳍可拍动的创新。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种基于介电弹性体驱动的仿飞鱼机器人,该机器人采用飞鱼仿生结构,可实现胸鳍的展开和拍动。
5.本发明的技术方案为:一种基于介电弹性体驱动的仿飞鱼机器人,包括机器人主体和设置在机器人主体上的仿飞鱼结构,所述仿飞鱼结构包括尾鳍、胸鳍的驱动元件和设置在机器人主体两侧可展开可收缩的胸鳍。
6.所述胸鳍的驱动元件包括电机、曲柄摇杆机构、转动元件和骨架,电机通过曲柄摇杆机构和转动元件驱动骨架。
7.所述曲柄摇杆机构包括依次铰接的偏心凸轮、第一连杆、第二连杆和第三连杆,所述电机与偏心凸轮连接,第三连杆通过转动元件带动骨架的运动。
8.所述机器人主体的中部连接有套筒,胸鳍的一边与骨架连接,胸鳍的另一边通过胸鳍连接件与套筒连接。
9.所述套筒上设有周向方向的导轨,胸鳍连接件安装在所述导轨上,胸鳍连接件能够沿导轨在套筒上运动。
10.所述转动元件与骨架为铰接连接,转动元件与骨架的铰接处设有介电弹性体。
11.所述机器人主体两侧的胸鳍为轴对称设置,所述胸鳍采用等分的扇形折纸结构。
12.所述机器人主体的一端设有动力舱和双轴舵机。
13.所述动力舱设有尾鳍,尾鳍为对称设置,尾鳍与双轴舵机相连接。
14.所述机器人主体上设有限位杆。限位杆限制骨架的最大展开状态。
15.本发明的一种基于介电弹性体驱动的仿飞鱼机器人的设计工作原理是:
16.(1)胸鳍的展开:胸鳍的骨架铰接在转动元件上,铰接处连接有介电弹性体,胸鳍设计为一种可展开可收缩式结构,胸鳍为柔性蒙皮的折纸结构,胸鳍上连接了基于折纸结
构的10等分扇形折叠结构,驱动介电弹性体时可以实现外部骨架的展开,同时实现胸鳍的展开。
17.(2)胸鳍的拍动:在水里时动力舱驱动机器人主体前进,双轴舵机带动尾鳍来控制机器人的平衡,进而改变机器人的俯仰姿态,当机器人具有一定速度时,驱动电机来控制转动元件,转动元件上连接有胸鳍的骨架,胸鳍连接件在套筒的导轨上进行滑动,从而带动机器人胸鳍的拍动。本发明采用曲柄摇杆机构来实现转动元件的转动;本发明针对现有的机器人所不具备的特性进行创新。
18.本发明的一种基于介电弹性体驱动的仿飞鱼机器人的运动过程为:
19.在水中动力舱驱动机器人前进,双轴舵机带动尾鳍来控制机器人的平衡,进而改变机器人的俯仰姿态,当机器人以一定速度冲出水面时,介电弹性体驱动胸鳍展开,同时电机开始工作,电机带动曲柄摇杆结构,摇杆带动转动元件在一定角度内进行转动,转动元件带动胸鳍的骨架进行摆动,从而驱动胸鳍拍动。本发明提出了一种基于介电弹性体驱动的仿飞鱼机器人设计,实现了对机器人的仿生,机器人主体尾部设置有一对尾鳍,可以调整机器人的平衡。
20.本发明相对于现有技术,具有以下有益效果:
21.本发明的一种基于介电弹性体驱动的仿飞鱼机器人的设计,既可以实现胸鳍的展开,又可以实现胸鳍的拍动,两侧的胸鳍采用可展开可收缩式设计,展开采用了介电弹性体智能材料驱动,有利于机器人在水里和空中的运动;胸鳍的拍动采用电机驱动,可为机器人提供更大的动力和调整在空中的飞行姿态,提升飞行距离;胸鳍部分主体采用机械结构,不仅结构装配简单、有较高的定位精度,还有较快的响应速度;设置在机器人主体尾部的尾鳍主要是为在水中的机器人提供初始动力和调整角度,可以为在空中飞行提供更大升力,本发明在特种机器人领域具有良好的应用前景。
附图说明
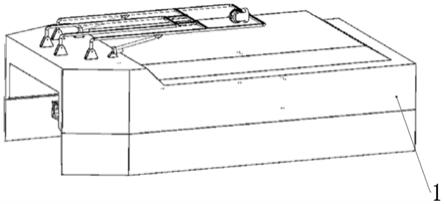
22.图1为本基于介电弹性体驱动的仿飞鱼机器人的胸鳍展开状态的结构示意图。
23.图2为本基于介电弹性体驱动的仿飞鱼机器人的胸鳍收缩状态的结构示意图。
24.图3为曲柄摇杆结构示意图。
25.图4为胸鳍结构示意图。
26.图5是套筒结构示意图。
27.图6是胸鳍连接件结构示意图。
28.其中,图中所示,1为机器人主体、2为电机、3为曲柄摇杆机构、4为限位杆、5为转动元件、6为介电弹性体、7为骨架、8为胸鳍、9为胸鳍连接件、10为套筒、11为尾鳍、12为双轴舵机、13为动力舱、14为偏心凸轮、15为第一连杆、16为第二连杆、17为第三连杆。
具体实施方式
29.下面结合实施例,对本发明作进一步的详细说明,但本发明的实施方式不限于此。
30.实施例
31.本实施例一种基于介电弹性体驱动的仿飞鱼机器人,如图1和2所示,包括机器人主体1和设置在机器人主体上的仿飞鱼结构,所述仿飞鱼结构包括尾鳍11、胸鳍的驱动元件
和设置在机器人主体两侧可展开可收缩的胸鳍8。
32.所述胸鳍的驱动元件包括电机2、曲柄摇杆机构3、转动元件5和骨架7,电机通过曲柄摇杆机构和转动元件驱动骨架。电机安装在机器人主体内部,可为胸鳍的拍打提供动力。
33.如图3所示,所述曲柄摇杆机构包括依次铰接的偏心凸轮14、第一连杆15、第二连杆16和第三连杆17,所述电机与偏心凸轮连接,第三连杆通过转动元件带动骨架的运动。骨架铰接在转动元件上,转动元件转动时带动骨架转动,骨架转动带动胸鳍转动。
34.所述机器人主体的中部连接有套筒10,胸鳍的一边与骨架连接,胸鳍的另一边通过胸鳍连接件9与套筒连接。
35.如图5和6所示,所述套筒上设有周向方向的导轨,胸鳍连接件安装在所述导轨上,胸鳍连接件上设有与导轨结构相适应的滑块,胸鳍连接件能够沿导轨在套筒上运动。当骨架带动胸鳍拍动时,胸鳍连接件也可沿导轨摆动。
36.所述转动元件与骨架为铰接连接,转动元件与骨架的铰接处设有介电弹性体6。
37.如图4所示,所述机器人主体两侧的胸鳍为轴对称设置,所述胸鳍采用十等分的扇形折纸结构,便于实现展开、收缩和拍动的动作。
38.所述机器人主体设置骨架的一端为头部,机器人主体的尾部一端设有动力舱13和双轴舵机12。
39.所述动力舱设有尾鳍,尾鳍为对称设置,尾鳍与双轴舵机相连接。双轴舵机安装在机器人主体内部,为尾鳍提供动力。尾鳍在有动力提供时驱动机器人在水里前进。
40.所述机器人主体上设有限位杆4。限位杆限制骨架的最大展开状态。
41.本发明的一种基于介电弹性体驱动的仿飞鱼机器人的设计工作原理是:
42.(1)胸鳍的展开:胸鳍的骨架铰接在转动元件上,铰接处连接有介电弹性体,胸鳍设计为一种可展开可收缩式结构,胸鳍为柔性蒙皮的折纸结构,胸鳍上连接了基于折纸结构的10等分扇形折叠结构,驱动介电弹性体时可以实现外部骨架的展开,同时实现胸鳍的展开。
43.(2)胸鳍的拍动:在水里时动力舱驱动机器人主体前进,双轴舵机带动尾鳍来控制机器人的平衡,进而改变机器人的俯仰姿态,当机器人具有一定速度时,驱动电机来控制转动元件,转动元件上连接有胸鳍的骨架,胸鳍连接件在套筒的导轨上进行滑动,从而带动机器人胸鳍的拍动。本发明采用曲柄摇杆机构来实现转动元件的转动;本发明针对现有的机器人所不具备的特性进行创新。
44.本发明的一种基于介电弹性体驱动的仿飞鱼机器人的运动过程为:
45.在水中动力舱驱动机器人前进,双轴舵机带动尾鳍来控制机器人的平衡,进而改变机器人的俯仰姿态,当机器人以一定速度冲出水面时,介电弹性体驱动胸鳍展开,同时电机开始工作,电机带动曲柄摇杆结构,摇杆带动转动元件在一定角度内进行转动,转动元件带动胸鳍的骨架进行摆动,从而驱动胸鳍拍动。本发明提出了一种基于介电弹性体驱动的仿飞鱼机器人设计,实现了对机器人的仿生,机器人主体尾部设置有一对尾鳍,可以调整机器人的平衡。
46.如上所述,便可较好地实现本发明,上述实施例仅为本发明的较佳实施例,并非用来限定本发明的实施范围;即凡依本发明内容所作的均等变化与修饰,都为本发明权利要求所要求保护的范围所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。