1.本发明涉及爬行器技术领域,具体涉及一种用于输油管道检测的爬行器。
背景技术:
2.运输管道是长距离输送石油天然气等液化产品所必需的设备,由于输油管道经过长期使用,裸露在外面的管道外壁受到所处自然气候的影响,会出现生锈等情况。随时间的推移以及化学腐蚀的作用,最终导致管道外壁破裂并发生流体泄漏,不仅会产生经济上的损失,而且会影响当地的生态。由于近期油价上调,露天输油管道线路经常被不法分子破坏钻孔盗油,造成不可估量的经济损失。由于人工排查检测故障点效率低,且主要依靠技术人员的耐心、工作责任心和工作经验,很容易出现一些破损部位无法检测或无法及时发现,只能发现明显的漏点。因此设计了一款用于输油管道检测的爬行器代替人工,用于全时段在线检测和排查输油管道。
技术实现要素:
3.针对说明书中存在的问题,本发明提供了结构设计合理的一种用于输油管道检测的爬行器。
4.本发明的技术方案如下:一种用于输油管道检测的爬行器,包括机架、所述机架一侧活动连接设置前爬行脚,另一侧活动连接设置后爬行脚,所述机架中部固定设置夹紧伸缩装置,且所述夹紧伸缩装置上固定设置检测装置,通过夹紧伸缩装置能够驱动机架在输油管道上伸缩运动,且配合前、后爬行脚实现在输油管道上的爬行动作,并通过检测装置实现对输油管道检测。
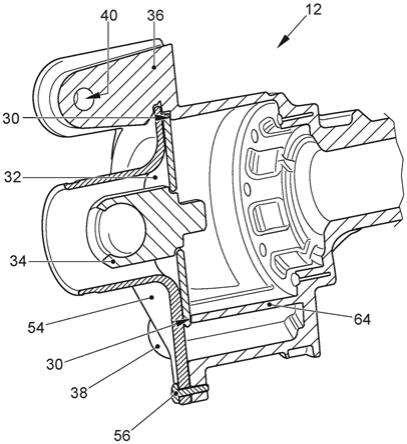
5.进一步的,所述检测装置包括检测箱、铁皮、支撑板一、支撑板二及夹板;所述检测箱为一圆筒形,所述铁皮上下包裹整个检测箱,所述夹板与铁皮及支撑板二三者固定连接,所述支撑板一侧面与支撑板二固定连接,所述支撑板一底端与机架固定连接,起到支撑固定作用。
6.进一步的,所述机架包括伸缩板接口、伸缩板、左端端架、右端端架及大气缸,所述大气缸设置在左、右端端架之间,左端端架上固定设置伸缩板接口,右端端架上固定设置伸缩板,通过大气缸的运行,可实现伸缩板和伸缩板接口的伸缩配合。
7.进一步的,所述前爬行脚与后爬行脚结构相同,均包括左爬行脚及与左爬行脚对称设置的右爬行脚。
8.进一步的,所述左爬行脚与右爬行脚结构相同,均包括大齿轮、小齿轮、齿轮连接杆、机械臂及驱动电机,大齿轮与小齿轮形成行星轮系,所述小齿轮固定不动,驱动电机的转轴穿过小齿轮后与齿轮连接杆一端固定连接,所述齿轮连接杆的另一端与大齿轮活动连接,所述机械臂固定在齿轮连接杆上。
9.进一步的,所述夹紧伸缩装置包括固定架一、滚轮、固定架气缸、固定架二、气缸套、轮架、夹紧气缸,所述固定架二设置在固定架一两侧位置处,所述固定架二与固定架一
之间设有固定架气缸,通过固定架气缸能够实现固定架二与固定架一的相对运动,固定架一及固定架二上分别固定连接设置气缸套,气缸套上固定连接设置夹紧气缸,夹紧气缸轴端固定设置连接轮架,轮架上活动设置连接滚轮。
10.进一步的,所述固定架一并列设置共两个,其中一个用于安装固定固定架气缸,所述固定架二共设置四个,所述固定架一之间设有连接板。
11.进一步的,所述检测箱中可承载x射线发射器或超声波发射器或γ射线发射器。
12.本发明的有益效果是:1)采取机械臂爬行外加轮式机构固定,由驱动气缸完成驱动行走,检测装置放置在机架上,行动过程由机械臂和驱动气缸共同完成。在爬行过程中可以主动越障,可靠性较高。
13.2)为使机械臂达到转动的目的,设计了行星轮系。它可以把电动机的转动转换为机械臂的启闭运动。由于旋转机械手在工作时,整个装置都在一个平面内转动;且机械臂采用左右手杆,成环抱形产生一定的正压力,使其附着在管道外壁表面。
附图说明
14.图1为本发明的整体结构示意图;图2为本发明的检测装置结构示意图;图3为本发明的机架结构示意图;图4为本发明的夹紧伸缩装置结构示意图;图5为本发明的左右爬行脚结构示意图;图6为本发明的蠕虫式爬行状态时序图;图中:1、检测装置;101、检测箱;102、铁皮;103、支撑板一;104、支撑板二;105、夹板;2、机架;201、伸缩板接口;202、伸缩板;203、右端端架;204、挡板;205、大气缸;206、左端端架;3、右爬行脚;4、夹紧伸缩装置;401、固定架一;402、滚轮;403、固定架气缸;404、固定架二;405、连接板;406、气缸套;407、轮架;408、夹紧气缸;5、左爬行脚;501、小齿轮;502、大齿轮;503、齿轮连接杆;504、机械臂。
具体实施方式
15.以下结合说明书附图,对本发明作进一步描述。
16.如图1-6所示,一种用于输油管道检测的爬行器,包括检测装置1、机架2、右爬行腿3、夹紧伸缩装置4、左爬行腿5。
17.机架2用于固定其余零部件,起到支撑固定的作用,机架2上固定设置夹紧伸缩装置4,两侧分别活动设置有右爬行脚3和左爬行脚5,夹紧伸缩装置4上固定设置检测装置1。
18.检测装置1包括检测箱101、铁皮102、支撑板一103、支撑板二104及夹板105。检测箱101为一圆筒形,铁皮102上下包裹整个检测箱102,夹板105、铁皮102、支撑板二104固定连接,支撑板一103侧面与支撑板二104固定连接,一端与固定架一401固定连接,起到支撑固定作用。
19.机架2包括伸缩板接口201、伸缩板202、右侧端架203、挡板204、大气缸205及左侧端架206,为了安装方便,将左、右端端架侧面分别设有挡板204,左、右端端架和挡板204固
定连接,挡板204与大气缸205活动连接,左端端架206上固定设置伸缩板接口201,右端端架203上固定设置伸缩板202,通过大气缸205的运行,可实现伸缩板202和伸缩板接口201的配合。
20.左爬行脚5、右爬行脚3结构相同,均包括小齿轮501、大齿轮502、齿轮连接杆503、机械臂504及驱动电机,左爬行脚5的驱动电机分别设置在左侧端架206内,右爬行脚3设置在右端端架203内,驱动电机与小齿轮501传动连接,大齿轮502与小齿轮501形成行星轮系,小齿轮501固定不动(小齿轮501固定在机架2上),驱动电机的转轴穿过小齿轮501后与齿轮连接杆503一端固定连接,齿轮连接杆503的另一端与大齿轮502活动连接,机械臂504固定在齿轮连接杆503上;从而左爬行脚5、右爬行脚3配合夹紧在输油管道上。
21.夹紧伸缩装置4包括固定架一401、滚轮402、固定架气缸403、固定架二404、连接板405、气缸套406、轮架407、夹紧气缸408,固定架一401共有两个,其中一个用于安装固定固定架气缸403,固定架二404共有四个,其中位于固定架一401同侧的两个固定架二404与固定架一401之间通过固定架气缸403连接,其中固定架一401、固定架二404上分别设有气缸安装座。固定架一401、固定架二404上固定连接设置气缸套406,气缸套406上固定连接设置夹紧气缸408,夹紧气缸408轴端固定设置连接轮架407,轮架407上活动设置连接三个滚轮402。固定架气缸403与夹紧气缸408均能起到夹紧的作用,从而使得滚轮402能够贴合在输油管道外表面。
22.检测箱101中可承载x射线发射器或超声波发射器或γ射线发射器等,由于x射线检测具有检测厚度大、准确度高、安全性高等优点,一般采用x射线检测,爬行器在管道外部爬行,对管道表面抽样拍摄,将检测图像发送到检测装置中进行图像分析。
23.右爬行脚5和左爬行脚3在上的两个齿轮的位置设置上略有不同,且考虑到其独特的攀爬方式,在整体结构上交错排列。
24.如图6所示,攀爬过程如下:1)当爬行器处于初始位置时,前爬行脚和后爬行脚的机械臂均处于夹持管路外壁的状态。
25.2)收到1次爬行指令后,后爬行脚夹持管路,慢慢张开,气缸(大气缸205)开始收缩,前爬行脚仍然保持夹紧状态,用来支撑整个爬行器。
26.3)气缸收缩到位后,后爬行脚闭合直到夹紧管子为止,然后前爬行脚再慢慢张开一定的角度,此时爬行器由后爬行脚支撑。
27.4)气缸伸长,后爬行脚一直处于夹紧状态,前爬行脚在气缸的作用下沿管道轴向运动,直至气缸伸长到位;此时爬行器便完成了蠕虫式步态的一个爬行循环。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。