1.本发明涉及多工况复合材料干切加工领域,具体涉及一种复合材料干切加工复杂多工况自适应除尘装置。
背景技术:
2.在绿色制造的时代背景下,复合材料因其比强度高、耐腐蚀性好和抗冲击性强等优点,广泛应用在航空、航天和汽车等结构件的轻量化设计过程中。而成型后的复合材料一般需要经过后续的铣削和钻削才能满足尺寸和精度要求。切削加工过程中不可避免的会产生粉尘颗粒,颗粒大小不一的粉尘首先造成了加工区域环境污染,其次对机床操作者也产生了严重的健康风险——因为微小的粉尘颗粒可到达人体呼吸系统的最深处。再加上碳纤维粉尘颗粒还具有导电性,可损坏甚至破坏机械和电子部件,因此,开发复合材料干切加工除尘装置是非常必要的。
3.针对此类问题,现有的除尘装置可实现轴向伸缩结构与工件加工表面产生空腔,借助负压吸尘器内流动气体产生空腔负压,最终完成切屑的快速收集与处理,适用于铣削与钻削加工,密闭的空腔减少了切屑对机床和人体的伤害并改善了加工表面质量,此方案仅适用于工件为平面的钻、铣削加工,而复合材料工件为曲面时,较小的接触面积使得伸缩机构难以与加工表面产生负压空腔。同时,现有技术还提出使用机械手臂带动除尘装置、切削刀具组件和连接结构,切削刀具安装完成后,自动装卸机构连接除尘罩本体,刀头由除尘罩本体吸尘口伸出。更换刀具时,自动装卸机构将除尘罩本体卸下,从而完成刀具更换。整个系统动作均在机械手臂上完成,其不仅引入了工业级机械手臂,而且体积大、经济成本高并占用工作台空间,再加上更换刀具步骤繁琐并且没有完全实现自动化,因此使用场合受到限制。
技术实现要素:
4.本发明的目的是提供一种复合材料干切加工复杂多工况自适应除尘装置,以解决现有技术中存在的问题。
5.为实现本发明目的而采用的技术方案是这样的,一种复合材料干切加工复杂多工况自适应除尘装置,包括大齿轮、主轴外连接支架、小齿轮和机械手。
6.所述主轴外连接支架和小齿轮固定支架均可拆卸的连接在机床主轴外壳上,小齿轮固定支架上固定有小齿轮电机,小齿轮电机的输出轴穿过小齿轮固定支架并与小齿轮连接。
7.所述主轴外连接支架的下表面连接有大齿轮轴承,大齿轮固定在大齿轮轴承上,小齿轮与大齿轮外啮合。
8.所述机床主轴外壳内的主轴与刀柄连接,刀柄的下端伸出机床主轴外壳并穿过主轴外连接支架和大齿轮轴承,刀具与刀柄的下端连接。
9.所述大齿轮的下表面连接有两块机械手悬挂支撑板,两块机械手悬挂支撑板关于
大齿轮的轴心对称。
10.两块所述机械手悬挂支撑板的下表面均连接有机械手,机械手包括机械手连杆、机械手连接架、机械手大臂、机械手前端圆杆、机械手前端电机和机械手轴向电机用连接架。
11.所述机械手轴向电机用连接架连接在机械手悬挂支撑板下表面,机械手轴向电机用连接架的下方设置有机械手轴向电机用固定板,机械手轴向电机用固定板的下表面连接有机械手轴向电机,机械手轴向电机的输出轴穿过机械手轴向电机用固定板并与机械手轴向电机用连接架固接。
12.所述机械手轴向电机用固定板的边缘连接有机械手侧面b电机连接架和机械手侧面a电机连接架,机械手大臂的上端位于机械手侧面b电机连接架和机械手侧面a电机连接架之间,下端与机械手连接架铰接。
13.所述机械手侧面b电机连接架上连接有机械手侧面b电机,机械手侧面b电机的输出轴与机械手侧面b电机摇杆连接,机械手侧面b电机摇杆与机械手连杆的上端铰接,机械手连杆的下端与机械手连接架铰接。
14.所述机械手侧面a电机连接架上连接有机械手侧面a电机,机械手侧面a电机的输出轴通过机械手侧面a电机传动杆与机械手大臂的上端固接。
15.所述机械手前端圆杆的上端与机械手连接架连接,下端与机械手前端电机支架连接,机械手前端电机支架上安装有机械手前端电机。
16.所述机械手前端电机的输出轴与机械手前端电机轴连接,机械手前端电机轴与软管前端支架连接。
17.两个所述机械手所连接的软管前端支架上均连接有软管,两根软管的上端分别固定在两块机械手悬挂支撑板上。
18.两个所述软管前端支架上分别连接有正压软管前端鸭嘴头和负压软管转接头,正压软管前端鸭嘴头和负压软管转接头分别与对应的软管连通。
19.加工前,工件传感器检测到工件安装到位后,相机拍照并将获取的工件图像传至数控系统处理,完成所述刀具的轨迹规划并生成加工代码,获得工件的加工轨迹与数控代码。
20.加工时,所述刀具对具有曲面的工件进行加工,数控系统根据加工轨迹与数控代码指导机械手前端电机、小齿轮电机、机械手轴向电机、机械手侧面b电机和机械手侧面a电机工作,实时调整正压软管前端鸭嘴头和负压软管转接头的位置,向与正压软管前端鸭嘴头连接的软管提供正压气流,正压软管前端鸭嘴头进行吹尘,向与负压软管转接头连接的软管提供负压气流,负压软管转接头进行吸尘。
21.进一步,所述大齿轮轴承包括轴承内圈固定环、大齿轮轴承内圈和大齿轮轴承外圈,轴承内圈固定环通过螺钉固定在主轴外连接支架的下表面,轴承内圈固定环的外圈过盈配合有大齿轮轴承内圈,大齿轮轴承外圈采用滚珠装配到大齿轮轴承内圈上,大齿轮轴承外圈的外圈与大齿轮的内圈过盈配合连接。
22.进一步,所述主轴外连接支架和小齿轮固定支架均采用螺钉连接在机床主轴外壳上。
23.本发明的有益效果在于:
24.1、针对大颗粒粉尘,沉降时间短,负压软管机械手单独作用便可使除尘效率提高50%;针对小颗粒粉尘,沉降时间长,正压机械手和负压机械手对位安装,正压负压同时作用,完成加工区粉尘导流,最终使得除尘效率提高50%;
25.2、装置使用了视觉和传感器系统,实现了cad/cam刀具轨迹规划并生成了加工代码,以此建立了可适应多工况复合材料切削加工除尘系统,为复合材料切削加工除尘的自适应展开提供了保障;
26.3、装置率先突破了自适应除尘,视觉和传感器系统的应用,避免了除尘过程中的人为干涉以及除尘装置与待加工工件的碰撞,减少了人力成本和加工的安全性;
27.4、装置为开式除尘,对不同类型工件的适用性更强,在保证除尘效率的前提下,又突破了曲面零件的除尘加工,拓展了复合材料零件的曲面铣削和钻削加工;
28.5、装置集成度高,包含了视觉和传感器系统以及机电系统,各子系统动作相互独立又互相协作,使得装置自身体积小、占用空间少;
29.6、装置自身重量较轻,除电机和轴承外均为9400树脂打印材料,降低了机床主轴外壳的悬挂重量,并节省了生产成本,市场应用前景广阔;
30.7、装置可实现多自由度,包括大齿轮绕轴向转动、正压与负压机械手沿刀具轴向距离调整以及沿刀具径向距离调整、正压与负压机械手轴向电机绕轴向转动、正压软管前端鸭嘴头转动和负压软管转接头转动。
31.8、需要更换刀具时,无需卸下除尘装置本体,减少了装卸机构的生产制造成本,且除尘过程中避免了形成负压空腔占用的时间,提高了生产加工效率,实现了安装即用,生态健康的绿色除尘。
32.综上,此装置可满足现有机床市场的复合材料加工要求,且能适应不同颗粒粉尘、可实现开式自适应除尘、轻质、高集成度、多自由度、低成本并能完成曲面加工,此外,还保障了机床操作者的人身健康和装置安全,因而,应用前景广阔。
附图说明
33.图1为加工前刀具轨迹规划流程图;
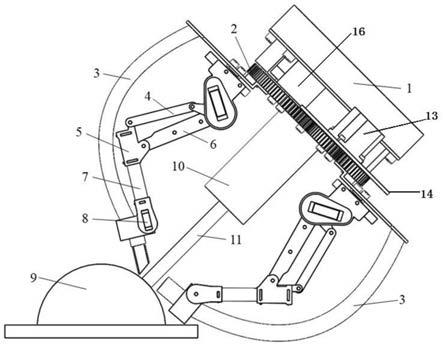
34.图2为本发明装置整体示意图;
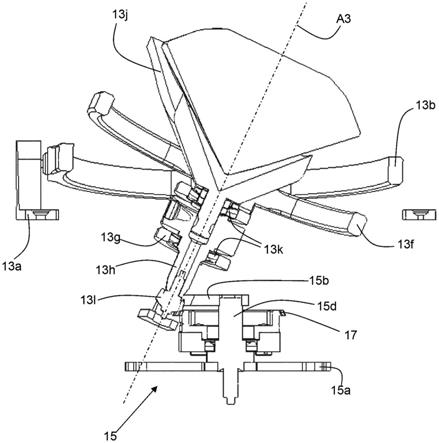
35.图3为主轴外连接支架连接示意图;
36.图4为大齿轮与小齿轮外啮合示意图;
37.图5为机械手示意图;
38.图6为机械手侧面b电机摇杆安装示意图;
39.图7为负压软管转接头示意图;
40.图8为正压软管前端鸭嘴头示意图;
41.图9为机械手悬挂支撑板和机械手连接处的示意图。
42.图中:机床主轴外壳1、大齿轮2、软管3、机械手连杆4、机械手连接架5、机械手大臂6、机械手前端圆杆7、机械手前端电机8、工件9、刀柄10、刀具11、小齿轮电机13、小齿轮固定支架14、轴承内圈固定环15、主轴外连接支架16、机械手悬挂支撑板17、小齿轮19、大齿轮轴承外圈21、大齿轮轴承内圈22、机械手轴向电机用连接架23、机械手侧面b电机连接架24、机械手轴向电机25、机械手侧面b电机26、机械手前端电机支架27、机械手侧面a电机29、机械
手侧面a电机连接架30、机械手轴向电机用固定板31、机械手侧面b电机摇杆32、机械手侧面a电机传动杆33、负压软管转接头36、软管前端支架38、正压软管前端鸭嘴头39和机械手前端电机轴40。
具体实施方式
43.下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
44.实施例1:
45.本实施例公开了一种复合材料干切加工复杂多工况自适应除尘装置,包括大齿轮2、主轴外连接支架16、小齿轮19和机械手。
46.参见图3,所述主轴外连接支架16和小齿轮固定支架14均采用螺钉可拆卸的连接在机床主轴外壳1上,对于多种类机床只要在主轴外连接支架16外安装转接板就可实现通用性。
47.所述小齿轮固定支架14上固定有小齿轮电机13,小齿轮电机13的输出轴穿过小齿轮固定支架14并与小齿轮19连接。
48.所述主轴外连接支架16的下表面连接有大齿轮轴承,大齿轮2固定在大齿轮轴承上,参见图4,小齿轮19与大齿轮2外啮合。
49.所述大齿轮轴承包括轴承内圈固定环15、大齿轮轴承内圈22和大齿轮轴承外圈21,轴承内圈固定环15通过螺钉固定在主轴外连接支架16的下表面,轴承内圈固定环15的外圈过盈配合有大齿轮轴承内圈22,大齿轮轴承外圈21采用滚珠装配到大齿轮轴承内圈22上,大齿轮轴承外圈21的外圈与大齿轮2的内圈过盈配合连接。
50.参见图2,所述机床主轴外壳1内的主轴与刀柄10连接,刀柄10的下端伸出机床主轴外壳1并穿过主轴外连接支架16和大齿轮轴承,刀具11与刀柄10的下端连接。
51.参见图3,所述大齿轮2的下表面连接有两块机械手悬挂支撑板17,两块机械手悬挂支撑板17关于大齿轮2的轴心对称。
52.参见图2,两块所述机械手悬挂支撑板17的下表面均连接有机械手,机械手包括机械手连杆4、机械手连接架5、机械手大臂6、机械手前端圆杆7、机械手前端电机8和机械手轴向电机用连接架23。
53.所述机械手轴向电机用连接架23连接在机械手悬挂支撑板17下表面,参见图5或9,机械手轴向电机用连接架23的下方设置有机械手轴向电机用固定板31,机械手轴向电机用固定板31的下表面连接有机械手轴向电机25,机械手轴向电机25的输出轴穿过机械手轴向电机用固定板31并与机械手轴向电机用连接架23固接。
54.所述机械手轴向电机用固定板31的边缘连接有机械手侧面b电机连接架24和机械手侧面a电机连接架30,机械手大臂6的上端位于机械手侧面b电机连接架24和机械手侧面a电机连接架30之间,下端与机械手连接架5铰接。
55.所述机械手侧面b电机连接架24上连接有机械手侧面b电机26,机械手侧面b电机26的输出轴与机械手侧面b电机摇杆32连接,参见图6,机械手侧面b电机摇杆32与机械手连杆4的上端铰接,机械手连杆4的下端与机械手连接架5铰接。
56.所述机械手侧面a电机连接架30上连接有机械手侧面a电机29,机械手侧面a电机29的输出轴通过机械手侧面a电机传动杆33与机械手大臂6的上端固接。
57.所述机械手前端圆杆7的上端与机械手连接架5连接,下端与机械手前端电机支架27连接,机械手前端电机支架27上安装有机械手前端电机8。
58.参见图7或8,所述机械手前端电机8的输出轴与机械手前端电机轴40连接,机械手前端电机轴40与软管前端支架38连接。
59.两个所述机械手所连接的软管前端支架38上均连接有软管3,两根软管3的上端分别固定在两块机械手悬挂支撑板17上。
60.参见图7或8,两个所述软管前端支架38上分别连接有正压软管前端鸭嘴头39和负压软管转接头36,正压软管前端鸭嘴头39和负压软管转接头36分别与对应的软管3连通。
61.安装有所述正压软管前端鸭嘴头39的机械手记为正压机械手,安装有负压软管转接头36的机械手记为负压机械手。
62.参见图1,加工前,工件传感器检测到工件9安装到位后,相机拍照并将获取的工件图像传至数控系统处理,完成所述刀具11的轨迹规划并生成加工代码,获得工件9的加工轨迹与数控代码。
63.加工时,所述刀具11按照加工轨迹与数控代码对具有曲面的工件9进行切削加工,数控系统根据加工轨迹与数控代码指导机械手前端电机8、小齿轮电机13、机械手轴向电机25、机械手侧面b电机26和机械手侧面a电机29工作,实时调整正压软管前端鸭嘴头39和负压软管转接头36的位置,向与正压软管前端鸭嘴头39连接的软管3提供正压气流,正压软管前端鸭嘴头39进行吹尘,向与负压软管转接头36连接的软管3提供负压气流,负压软管转接头36进行吸尘,实现开式导流的方式。
64.值得说明的是,本实施例所述装置主要解决的是数控加工中心钻、铣削复合材料如磁性复合材料和纤维复合材料等过程中粉尘颗粒快速回收的技术难题,该装置可适应多工况复合材料切削加工除尘控制系统读取待加工工件的加工轨迹与数控代码,并在避免正压机械手和负压机械手底部干涉工件的前提下,可适应多工况复合材料切削加工除尘控制系统按照读取的加工轨迹与数控代码输出给小齿轮电机13对应脉冲,小齿轮电机13直接驱动小齿轮19转动并通过直齿轮啮合方式带动大齿轮2转动相应角度,大齿轮2下端分别通过两个机械手悬挂支撑板17安装有正压机械手和负压机械手,两个机械手悬挂支撑板17对位安装。考虑到曲面加工时主轴会出现摆动,因此,两个机械手轴向电机25、两个机械手前端电机8要保持上电,以保证正压机械手和负压机械手尾部不会出现干涉曲面工件的情况。所述正压与负压机械手的机械手侧面a电机29及机械手侧面b电机26同时动作,完成正压与负压机械手沿刀具轴向距离调整以及沿刀具径向距离调整。
65.考虑到所述大齿轮2分度圆上齿厚和齿槽宽的值较大再加上待加工工件曲面的复杂性,大齿轮2每齿转动的相应角度可能使得正压与负压机械手分别带动的正压软管前端鸭嘴头39和负压软管转接头36并非一直和刀具线速度方向相切,因此,机械手侧面a29和机械手侧面b电机26调整的同时,机械手轴向电机25分别自适应绕轴向做小角度转动,机械手轴向电机25的输出轴转动可以带动机械手轴向电机用固定板31转动,从而实现正压与负压机械手小角度转动调整,以调整正压软管前端鸭嘴头39与负压软管转接头36相对于刀具11及工件9接触区的角度。
66.所述机械手轴向电机25调整完成后,机械手前端电机8带动软管前端鸭嘴头支架38转动,以调整正压软管前端鸭嘴头39、负压软管转接头36相对于刀具11及工件9接触区的角度,即调整正压吹尘角度和负压吸尘角度。
67.此外,所述正压机械手前端的吹尘装置为正压软管前端鸭嘴头39,目的是提高正压口的气流速度,而负压机械手前端吸尘装置为负压软管转接头36,负压软管转接头36的内径要明显大于正压软管前端鸭嘴头39的内径,目的是考虑大颗粒粉尘的重力作用,保证粉尘可以精确的导流到负压软管转接头36中,这样正压和负压共同协作,保证了除尘效果最优。
68.实施例2:
69.本实施例公开了一种复合材料干切加工复杂多工况自适应除尘装置,包括大齿轮2、主轴外连接支架16、小齿轮19和机械手。
70.参见图3,所述主轴外连接支架16和小齿轮固定支架14均可拆卸的连接在机床主轴外壳1上,小齿轮固定支架14上固定有小齿轮电机13,小齿轮电机13的输出轴穿过小齿轮固定支架14并与小齿轮19连接。
71.所述主轴外连接支架16的下表面连接有大齿轮轴承,大齿轮2固定在大齿轮轴承上,参见图4,小齿轮19与大齿轮2外啮合。
72.参见图2,所述机床主轴外壳1内的主轴与刀柄10连接,刀柄10的下端伸出机床主轴外壳1并穿过主轴外连接支架16和大齿轮轴承,刀具11与刀柄10的下端连接。
73.参见图3,所述大齿轮2的下表面连接有两块机械手悬挂支撑板17,两块机械手悬挂支撑板17关于大齿轮2的轴心对称。
74.参见图2,两块所述机械手悬挂支撑板17的下表面均连接有机械手,机械手包括机械手连杆4、机械手连接架5、机械手大臂6、机械手前端圆杆7、机械手前端电机8和机械手轴向电机用连接架23。
75.参见图5或9,所述机械手轴向电机用连接架23连接在机械手悬挂支撑板17下表面,机械手轴向电机用连接架23的下方设置有机械手轴向电机用固定板31,机械手轴向电机用固定板(31)的下表面连接有机械手轴向电机25,机械手轴向电机25的输出轴穿过机械手轴向电机用固定板31并与机械手轴向电机用连接架23固接。
76.所述机械手轴向电机用固定板31的边缘连接有机械手侧面b电机连接架24和机械手侧面a电机连接架30,机械手大臂6的上端位于机械手侧面b电机连接架24和机械手侧面a电机连接架30之间,下端与机械手连接架5铰接。
77.所述机械手侧面b电机连接架24上连接有机械手侧面b电机26,机械手侧面b电机26的输出轴与机械手侧面b电机摇杆32连接,参见图6,机械手侧面b电机摇杆32与机械手连杆4的上端铰接,机械手连杆4的下端与机械手连接架5铰接。
78.所述机械手侧面a电机连接架30上连接有机械手侧面a电机29,机械手侧面a电机29的输出轴通过机械手侧面a电机传动杆33与机械手大臂6的上端固接。
79.所述机械手前端圆杆7的上端与机械手连接架5连接,下端与机械手前端电机支架27连接,机械手前端电机支架27上安装有机械手前端电机8。
80.参见图7或8,所述机械手前端电机8的输出轴与机械手前端电机轴40连接,机械手前端电机轴40与软管前端支架38连接。
81.两个所述机械手所连接的软管前端支架38上均连接有软管3,两根软管3的上端分别固定在两块机械手悬挂支撑板17上。
82.参见图7或8,两个所述软管前端支架38上分别连接有正压软管前端鸭嘴头39和负压软管转接头36,正压软管前端鸭嘴头39和负压软管转接头36分别与对应的软管3连通。
83.参见图1,加工前,工件传感器检测到工件9安装到位后,相机拍照并将获取的工件图像传至数控系统处理,完成所述刀具11的轨迹规划并生成加工代码,获得工件9的加工轨迹与数控代码。
84.加工时,所述刀具11对具有曲面的工件9进行加工,数控系统根据加工轨迹与数控代码指导机械手前端电机8、小齿轮电机13、机械手轴向电机25、机械手侧面b电机26和机械手侧面a电机29工作,实时调整正压软管前端鸭嘴头39和负压软管转接头36的位置,向与正压软管前端鸭嘴头39连接的软管3提供正压气流,正压软管前端鸭嘴头39进行吹尘,向与负压软管转接头36连接的软管3提供负压气流,负压软管转接头36进行吸尘。
85.实施例3:
86.本实施例主要结构同实施例2,进一步,所述大齿轮轴承包括轴承内圈固定环15、大齿轮轴承内圈22和大齿轮轴承外圈21,轴承内圈固定环15通过螺钉固定在主轴外连接支架16的下表面,轴承内圈固定环15的外圈过盈配合有大齿轮轴承内圈22,大齿轮轴承外圈21采用滚珠装配到大齿轮轴承内圈22上,大齿轮轴承外圈21的外圈与大齿轮2的内圈过盈配合连接。
87.实施例4:
88.本实施例主要结构同实施例2,进一步,所述主轴外连接支架16和小齿轮固定支架14均采用螺钉连接在机床主轴外壳1上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。